1.本实用新型涉及一种夹板装置,特别是涉及一种钻孔机的夹板装置。
背景技术:
2.现有印刷电路板利用钻孔来连接或导通不同电路层的线路已是常见手段。在钻孔作业过程中,作业者需先将印刷电路板以胶带一一黏贴在钻孔机的工作台后,才能进行钻孔作业,手动黏贴胶带的过程不仅浪费人工、花费时间,使产能无法提升,且在作业后撕掉胶带还会造成残胶的问题,极需解决。
技术实现要素:
3.本实用新型的目的在于提供一种能节省作业时间且可避免残胶问题的钻孔机的夹板装置。
4.本实用新型所述的钻孔机的夹板装置,适用于夹持至少一个板件,所述钻孔机的夹板装置包含基座单元及至少两对夹持单元。
5.所述基座单元沿第一方向及第二方向延伸,所述第一方向实质上垂直于所述第二方向,所述基座单元具有顶面,所述顶面具有多个沿所述第二方向延伸的滑槽。
6.所述至少两对夹持单元间隔设置于所述基座单元,每一个所述夹持单元包括在一个第三方向上低于所述顶面的夹持驱动件,及对应于所述滑槽且被所述夹持驱动件带动的至少一个夹持座,所述第三方向、所述第一方向与所述第二方向实质上互相垂直,每一对夹持单元的两个所述夹持驱动件在所述第二方向上相反设置,每一个所述夹持驱动件用来带动对应的夹持座沿所述第二方向移动,每一个所述夹持座具有升降驱动件,及在所述第三方向上高于所述升降驱动件且用来夹持所述板件的夹持件,每一个所述夹持件能在对应的滑槽内移动且被所对应的升降驱动件带动而能沿所述第三方向移动,每一个所述夹持件具有能在对应的滑槽内移动的夹持部,通过驱动每一个所述升降驱动件能带动对应的夹持件的夹持部自所对应的滑槽伸出所述顶面,要在所述钻孔机的夹板装置取放所述板件时,所述夹持部分别自所述滑槽伸出所述顶面且用来顶靠所述板件的底面。
7.本实用新型所述的钻孔机的夹板装置,每一对夹持单元的两个所述夹持驱动件在所述第一方向上相间隔。
8.本实用新型所述的钻孔机的夹板装置,每一个所述夹持单元包括沿所述第二方向间隔设置的多个所述夹持座,及连接于所述夹持座的至少一个连接杆。
9.本实用新型所述的钻孔机的夹板装置,每一个所述夹持单元的夹持驱动件具有设置于所述基座单元的缸体,及能伸缩地设置于所述缸体的活塞杆,每一个所述夹持单元包括多个沿所述第二方向间隔设置的所述夹持座及多个连接杆,其中一个所述连接杆连接于其中一个所述夹持座与所述活塞杆,另外的所述连接杆分别连接于所述夹持座间。
10.本实用新型所述的钻孔机的夹板装置,所述钻孔机的夹板装置包含三对所述夹持单元,每一个所述夹持单元包括三个所述夹持座,所述钻孔机的夹板装置用来同时夹持三
个所述板件。
11.本实用新型所述的钻孔机的夹板装置,每一个所述夹持单元的夹持驱动件具有设置于所述基座单元的缸体,及能伸缩地设置于所述缸体的活塞杆,每一个所述夹持单元包括所述夹持座及连接杆,所述连接杆连接于所述夹持座与所述活塞杆。
12.本实用新型的钻孔机的夹板装置,所述基座单元包括基座及设置于所述基座的顶板组,所述顶板组具有所述顶面,所述夹持单元的连接杆在所述第三方向上低于所述顶板组,每一个所述夹持座还具有接合于其邻近的连接杆的座体,所述座体供所述升降驱动件设置。
13.本实用新型的钻孔机的夹板装置,每一个所述滑槽具有远端及较所述远端更靠近所对应的夹持驱动件的近端,当所述夹持件的夹持部分别位于所述远端时,所述夹持件远离所述板件。
14.本实用新型的有益效果在于:本实用新型钻孔机的夹板装置利用所述夹持驱动件、所述升降驱动件带动所述夹持座移动或升降,并使所述夹持部互相靠近而能夹持所述板件,相较于现有采用胶带黏贴的人工方式,本实用新型能节省作业时间,提高产能,还能避免残胶的问题。同时,本实用新型在取放所述板件时,通过所述夹持部自所对应的滑槽伸出所述顶面并顶高所述板件,进而提供机械手臂夹取所述板件的空间,而有助于达成所述钻孔机的全自动化作业。
附图说明
15.本实用新型的其他的特征及功效,将于参照附图的实施方式中清楚地呈现,其中:
16.图1是本实用新型钻孔机的夹板装置的第一实施例的立体图;
17.图2是沿着图1中的线ii-ii所截取的剖视图;
18.图3是由底侧朝顶侧观看所述第一实施例的不完整的立体图,且图中省略一个基座;
19.图4是所述第一实施例的不完整的俯视图,图中省略所述基座;
20.图5是所述第一实施例的不完整之前视图,图中省略所述基座;
21.图6是所述第一实施例的三对夹持单元的立体图;
22.图7是其中一个所述夹持单元的一个夹持座的立体图;
23.图8是第一实施例的立体图,图中省略所述基座,且所述夹持座的夹持部伸出一个顶面;
24.图9是利用所述三对夹持单元夹持三个板件的俯视示意图;
25.图10是使用所述第一实施例夹持所述板件的流程图;
26.图11至图16是利用所述第一实施例夹持所述板件的动作示意图;
27.图17至图19是将所述板件自所述第一实施例卸除的动作示意图;
28.图20是本实用新型钻孔机的夹板装置的第二实施例的立体图;
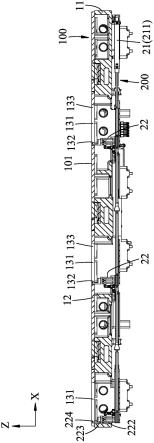
29.图21是所述第二实施例的仰视图,图中省略所述基座;
30.图22是俯视示意图,说明利用所述夹持单元夹持一个所述板件;及
31.图23是侧视示意图,说明每一个所述夹持单元的一个升降驱动件顶高所述板件。
具体实施方式
32.在本实用新型被详细描述前,应当注意在以下的说明内容中,类似的组件是以相同的编号来表示。
33.参阅图1至图3,本实用新型钻孔机的夹板装置的一个第一实施例,适用于夹持三个板件9a、9b、9c(见图9),所述钻孔机的夹板装置包含一个基座单元100及三对夹持单元200。
34.所述基座单元100沿一个第一方向y及一个第二方向x延伸,所述基座单元100包括一个基座11及沿一个第三方向z设置于所述基座11的一个顶板组12,所述第一方向y、所述第二方向x与所述第三方向z实质上互相垂直,以图1的方向来看,所述第一方向y为前后方向,所述第二方向x为左右方向,所述第三方向z为顶底方向。所述顶板组12具有远离所述基座11的一个顶面101,较佳地,所述顶板组12由不同形状或尺寸的多个顶板121组合而成。
35.参阅图3与图4,所述顶面101具有分别对应于所述板件9a、9b、9c(见图9)的三组滑槽组13a、13b、13c。以下说明以所述滑槽组13a做为示例:所述滑槽组13a具有三对滑槽131并用来对应所述板件9a之前、中、后三个位置,且每一对的两个滑槽131在所述第一方向y与所述第二方向x间隔设置。
36.所述三对夹持单元200沿所述第二方向x延伸且在所述第一方向y间隔设置于所述基座单元100,所述三对夹持单元200与所述滑槽组13a、13b、13c成纵横交叉排列。每一对夹持单元200是指两个所述夹持单元200,也就是说本第一实施例的所述夹持单元200数量有六个。
37.参阅图2、图3与图5,每一个所述夹持单元200包括设置在所述基座11的底侧且在所述第三方向z上低于所述顶面101的一个夹持驱动件21、与所述夹持驱动件21连动的三个夹持座22,及在所述第三方向z上低于所述顶面101的多个连接杆23。所述夹持驱动件21具有设置于所述基座11的一个缸体211,及能伸缩地设置于所述缸体211的一个活塞杆212,较佳地,所述夹持驱动件21是一种气压缸。所述夹持座22沿所述第二方向x间隔设置且分别对应于所述滑槽131且两者数量相同。其中一个所述连接杆23连接于所述活塞杆212与其中一个所述夹持座22,另外的所述连接杆23分别连接于所述夹持座22之间。所述夹持驱动件21用来带动所述夹持座22同时沿所述第二方向x移动,也就是一个气压缸同时带动三个所述夹持座22移动。如图5所示,面向彼此的两个夹持座22为一对,本第一实施例共有九对所述夹持座22。
38.参阅图4,每一对所述夹持单元200的两个夹持驱动件21在所述第二方向x上相反设置且在所述第一方向y上相间隔,且位于所述顶板组12的两相对侧,也就是说,每一对所述夹持单元200的其中一个所述夹持驱动件21靠近所述滑槽组13a,且其所述活塞杆212朝所述滑槽组13b的方向伸缩移动,另一个所述夹持驱动件21靠近所述滑槽组13c,且其所述活塞杆212朝所述滑槽组13b的方向伸缩移动,借此,使每一对所述夹持座22能互相靠近或互相远离。
39.参阅图2与图4,详细来说,每一个所述滑槽131沿所述第二方向x延伸,且具有一个远端132及较所述远端132更靠近所对应的夹持驱动件21的一个近端133。所述夹持驱动件21用来驱动所述夹持座22在所述滑槽131的远端132与近端133间移动。
40.参阅图2、图6与图7,每一个所述夹持座22具有接合于其邻近的连接杆23的一个座
体221、设置于所述座体221且沿所述第三方向z朝所述顶板组12的方向延伸的一个升降驱动件222,及能在对应的滑槽131内移动且被对应的升降驱动件222带动而能沿所述第三方向z上下移动的一个夹持件223。所述升降驱动件222是一种气压缸。所述夹持件223在所述第三方向z上高于所述升降驱动件222且具有在所述第三方向z上高于所述夹持驱动件21的一个夹持部224,所述夹持部224呈倒勾状。
41.参阅图2与图8,通过驱动每一个所述升降驱动件222能带动对应的夹持件223的夹持部224自所对应的滑槽131伸出所述顶面101。
42.参阅图4、图8与图9所示,当所述夹持件223的夹持部224分别位于所述远端132时,所述夹持件223远离所述板件9a、9b、9c。当所述夹持部224由所述滑槽131伸出所述顶面101且由所述滑槽131的远端132朝近端133的方向移动时,所述夹持件223的夹持部224会抵靠并夹紧所述板件9a、9b、9c的左右两侧,每三对所述夹持座22用来夹持所述板件9a、9b、9c中的一个,并在每一个所述板件9a、9b、9c形成有六个夹持点,借此,使所述板件9a、9b、9c能稳固地被夹持于所述夹持座22,随后便可对所述板件9a、9b、9c进行钻孔加工。
43.参阅图10,进一步说明利用本第一实施例夹持所述板件9a、9b、9c的夹持方法:
44.步骤81,配合图11与图12,驱动所述升降驱动件222带动所述夹持件223上升至所述夹持部224伸出对应的滑槽131(见图8)而高于所述顶面101,相配合的两个夹持件223靠近彼此,再将所述板件9a、9b、9c的底面朝所述夹持部224放置。
45.步骤82,配合图13,驱动每一对所述夹持座22的夹持部224由对应的滑槽131下沉并带动所对应的板件9a、9b、9c下降,直到所述板件9a、9b、9c被放置于所述顶面101。
46.步骤83,配合图14与图15,驱动每一对所述夹持座22的夹持部224互相远离直到离开所对应的板件9a、9b、9c,并再次上升且由对应的滑槽131伸出至高出对应的板件9a、9b、9c。
47.步骤84,配合图16,驱动每一对所述夹持座22的夹持部224朝对应的板件9a、9b、9c靠近且下降而夹紧所对应的板件9a、9b、9c。此后,便可对所述板件9a、9b、9c进行钻孔作业。
48.步骤85,配合图17,钻孔作业完成后,驱动每一对所述夹持座22的夹持部224互相远离而脱离对应的板件9a、9b、9c。
49.步骤86,配合图18,驱动每一对所述夹持座22的夹持部224由对应的滑槽131下沉至低于所对应的板件9a、9b、9c后再靠近彼此。
50.步骤87,配合图19,驱动每一对所述夹持座22的夹持部224上升并由对应的滑槽131伸出,借此,将所述板件9a、9b、9c顶高且离开所述顶面101。
51.步骤88,最后,取出所述板件9a、9b、9c。
52.要特别说明的是,如图9所示,本第一实施例通过三对所述夹持单元200来夹持所述板件9a、9b、9c之前、中、后三个位置,在其他变化例中,也能利用两对所述夹持单元200来夹持所述板件9a、9b、9c之前、后两个位置,同样能稳固地夹持所述板件9a、9b、9c。
53.本第一实施例还利用每一个所述夹持单元200的夹持驱动件21同时带动三个所述夹持座22移动,而能同时夹持三个所述板件9a、9b、9c,能节省组件数量并降低成本。在其他变化例中,也能使每一个所述夹持单元200的夹持驱动件21同时带动两个或四个以上的所述夹持座22移动,而能同时夹持两个或四个以上的板件,因此,所述夹持座22的数量并非本实用新型的限制。
54.能理解的是,本实用新型还通过所述升降驱动件222驱使所述夹持部224上升而能将所述板件9a、9b、9c自所述顶面101顶高,进而提供机械手臂夹取所述板件9a、9b、9c的空间,有助于达成所述钻孔机的全自动化作业。
55.参阅图20至图22,本实用新型钻孔机的夹板装置的第二实施例,是类似于所述第一实施例,差异处在于:
56.本第二实施例适用于夹持一个所述板件9a,所述基座单元100的顶面101具有一个所述滑槽组13a。
57.每一个所述夹持单元200包括一个所述夹持驱动件21、一个所述夹持座22及一个所述连接杆23,所述连接杆23连接于所述夹持座22与所述夹持驱动件21的活塞杆212,借此,形成面向彼此的三对所述夹持座22。所述夹持驱动件21驱动所述夹持座22的夹持部224在所述滑槽131内移动,同样能使所述板件9a被夹持于所述夹持座22且形成六个夹持点。本第二实施例利用一个所述夹持驱动件21带动一个所述夹持座22移动,因此,夹持力较佳。
58.参阅图23,同样地,所述升降驱动件222能带动所述夹持件223的夹持部224朝顶侧移动至伸出所述顶面101,同样能用来顶高所述板件9a,便于取放料。
59.综上所述,本实用新型钻孔机的夹板装置利用所述夹持驱动件21带动所述夹持座22夹持所述板件9a、9b、9c,相较于现有采用胶带黏贴的人工方式,本实用新型能节省作业时间,提高产能,还能避免残胶污染的问题。同时,本实用新型在取放所述板件9a、9b、9c时,会先使所述夹持部224分别由所述滑槽131伸出所述顶面101并顶高所述板件9a、9b、9c,进而提供机械手臂夹取所述板件9a、9b、9c的空间,而有助于达成所述钻孔机的全自动化作业。
60.以上所述者,仅为本实用新型的实施例而已,当不能以此限定本实用新型实施的范围,即凡依本实用新型权利要求书及说明书内容所作的简单的等效变化与修饰,皆仍属本实用新型的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。