1.本实用新型属于机械装置及运输技术领域,具体涉及一种区域通用全地形无人驾驶车辆。
背景技术:
2.区域通用全地形无人驾驶车辆是以无人线控全地形底盘为基础的移动车辆,具有良好的越野通过性、承载性、环境适应性,具备路径规划、自主循迹、遥控接管、图像回传、可视化操作等功能。
3.目前现有的区域内无人驾驶车辆是定制的单功能无人驾驶靶车,如高速靶车,可视化巡逻车。高速靶车体积较大,结构不紧凑,功能单一,不具备局部路径规划功能,制造成本较高;而可视化巡逻车,通过性较差,行驶速度较低,续航较短,两者均无法实现多功能的通用型设计。
技术实现要素:
4.有鉴于此,本实用新型提供了一种区域通用全地形无人驾驶车辆,具备多功能,低成本,结构紧凑,通过性好的特点。
5.本实用新型是通过下述技术方案实现的:
6.一种区域通用全地形无人驾驶车辆,包括:全地形通用底盘、非承载式车身、可视化系统及定位系统;
7.所述全地形通用底盘采用ssv竞技全地形车型,所述全地形通用底盘的主体框架为主车架;
8.整体连接关系如下:所述非承载式车身包络在全地形通用底盘的上方,并通过橡胶软垫或弹簧与全地形通用底盘的主车架柔性连接;
9.所述可视化系统安装在非承载式车身的顶部,两个所述定位系统分别安装在非承载式车身的车头和车尾;
10.所述可视化系统采用了mimo-高频率便携式图传系统;
11.所述定位系统采用激光雷达、gps/北斗系统及imu惯导组合的方式为无人驾驶车辆进行导航,提供无人驾驶车辆的位置数据。
12.进一步的,所述全地形通用底盘在主车架的基础上还包括:前减震系统、后减震系统、发动机、四驱传动系统、转向系统、制动系统、前悬臂、后悬臂、进气过滤系统及排气消音系统;
13.所述主车架上设有通用型的接口;
14.所述前减震系统、后减震系统、发动机、四驱传动系统、转向系统、制动系统、前悬臂和后悬臂、进气过滤系统及排气消音系统均通过主车架上的通用型的接口安装在主车架上,其中,前减震系统、前悬臂和制动系统均位于主车架的车头方向,转向系统、四驱传动系统及发动机位于主车架的中部,后悬臂、后减震系统、进气过滤系统及排气消音系统均位于
主车架的车尾方向。
15.进一步的,所述主车架采用316l不锈钢材料,通过3d打印的加工方式形成“环抱式”车架。
16.进一步的,所述发动机选用v型双缸四冲程水冷电喷汽油发动机。
17.进一步的,所述四驱传动系统的前桥选用了电控强制锁止式差速器,四驱传动系统的后桥选用了自动机械锁止式螺旋齿限滑差速器。
18.进一步的,所述四驱传动系统根据发动机的选型,配比了cvt无级变速箱。
19.进一步的,所述全地形通用底盘的前悬臂和后悬臂均为独立悬挂;前悬臂采用双a臂悬挂,后悬臂采用多连杆独立悬挂。
20.进一步的,所述前减震系统和后减震系统均采用“螺旋弹簧 气动阻尼式”复合减振器,该复合减振器为油气分离外置式阻尼可调式减震器。
21.进一步的,所述全地形通用底盘的制动系统采用四轮盘式cbs制动系统,四轮盘式cbs制动系统采用液压盘式制动方式;所述四轮盘式cbs制动系统包括:制动电机、制动电机控制器、制动主缸和制动卡钳;制动电机控制器控制制动电机转动,制动电机的转动通过丝杠转换为直线运动,丝杠前进时顶住制动主缸的活塞,进而给液压管路提供压力,所述液压管路的压力推动制动卡钳夹紧制动盘,实现制动;丝杠后退时,四轮盘式cbs制动系统不工作。
22.进一步的,所述全地形通用底盘的转向系统采用线控转向系统;所述线控转向系统包括:转向控制器、转向电机、转向柱和转向拉杆;转向控制器控制转向电机转动,转向电机转动电动转向柱转动,转向柱带动转向拉杆,转向拉杆带动无人驾驶车辆的车轮进行转向。
23.有益效果:
24.(1)本实用新型是以全地形通用底盘及非承载式车身为基础的移动车辆,具有优良的越野通过性、环境适应性,具备路径规划、自主循迹、遥控接管、图像回传、可视化操作等功能。同时,该无人驾驶车辆具备近人工驾驶、近距离现场遥控控制驾驶、远程无人驾驶的功能,扩展了车辆的功能及用途;该无人驾驶车辆可作为高速军事模拟靶车,非承载式车身可根据应用场景进行替换,分别用于开发边境巡逻车、智能运输车、多功能安防车、边防侦查车等军用、警用特种车辆;此外,该无人驾驶车辆还可在靶区内作为自动报靶系统车,用于其他靶标打靶情况的实时观测和动态报靶功能,具有良好的应用和研发价值。
25.(2)本实用新型的无人驾驶车辆具备良好的环境适应性,可在沙漠、草地、泥地、靶场等复杂路况行走,工作温度可在-40度到50度之间,具备良好的环境适应性。
26.(3)本实用新型的无人驾驶车辆的发动机选用v型双缸四冲程水冷电喷汽油发动机,四驱传动系统的前桥选用了电控强制锁止式差速器,四驱传动系统的后桥选用了自动机械锁止式螺旋齿限滑差速器,爬坡能力≧20度;该车辆采用独立悬挂结构,前悬臂采用双a臂悬挂,后悬臂采用多连杆独立悬挂,前减震系统和后减震系统均采用“螺旋弹簧 气动阻尼式”复合减振,车辆具备轻量化设计整备质量约800kg,同时具备较好的承载性,最大承载300kg。
27.(4)本实用新型将用在两轮摩托车上的cbs前后联动刹车系统用在本实用新型的无人驾驶车辆上,即无人驾驶车辆的制动系统采用四轮盘式cbs制动系统,四轮盘式cbs制
动系统采用液压盘式制动方式,具备了四轮轮边联合制动,可将制动力进行分配,使无人车具备了优秀的制动性能和刹车稳定性能。
附图说明
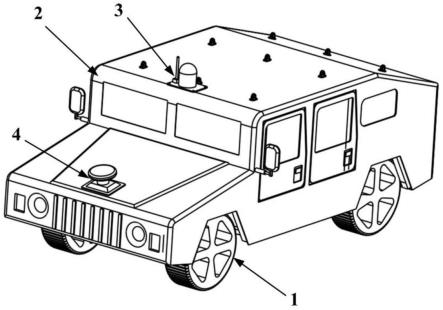
28.图1为本实用新型的外形图;
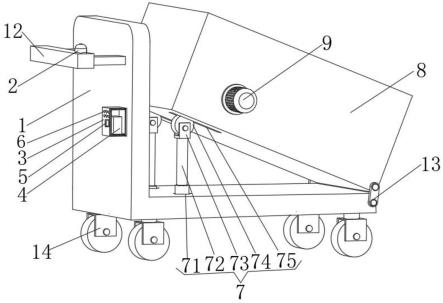
29.图2为本实用新型的全地形通用底盘的结构组成图;
30.图3为本实用新型的全地形通用底盘的俯视图;
31.图4为本实用新型的全地形通用底盘的主视图;
32.图5为本实用新型的转向系统的示意图;
33.其中,1-全地形通用底盘,2-非承载式车身,3-可视化系统,4-定位系统,11-主车架,12-前悬臂,13-前减震系统,14-转向系统,15-制动系统,16-四驱传动系统,17-发动机,18-后悬臂,19-后减震系统,20-排气消音系统,21-进气过滤系统。
具体实施方式
34.下面结合附图并举实施例,对本实用新型进行详细描述。
35.本实施例提供了一种区域通用全地形无人驾驶车辆,参见附图1,包括:全地形通用底盘1、非承载式车身2、可视化系统3及定位系统4;
36.所述全地形通用底盘1采用ssv(side by side vehicle)竞技全地形车型,该车型具有重量轻、承载好、刚度好、可升级开发等优点,采用该车型的底盘车辆性能优越,又兼顾了高速驾驶和越野通过性,可以在沙漠、陡坡、泥沼等困难地形中快速通过;参见附图2-4,所述全地形通用底盘1包括:主车架11、前减震系统13、后减震系统19、发动机17、四驱传动系统16、转向系统14、制动系统15、前悬臂12、后悬臂18、进气过滤系统21及排气消音系统20;
37.所述主车架11采用316l不锈钢材料,通过3d打印的加工方式形成“环抱式”车架,该车架具备防腐、强度高、韧性好等综合材料性能;主车架11的底部设有组合大梁,该组合大梁为主车架11的主承载部件;主车架11上设有通用型的接口,可对全地形通用底盘1的其余部件提供模块化的固定安装;主车架11是支撑无人驾驶车辆整车的基础,承受着在其上所安装的各个部件的各种载荷;
38.所述前减震系统13、后减震系统19、发动机17、四驱传动系统16、转向系统14、制动系统15、前悬臂12和后悬臂18、进气过滤系统21及排气消音系统20均通过主车架11上的通用型的接口安装在主车架11上,其中,前减震系统13、前悬臂12和制动系统15均位于主车架11的车头方向,转向系统14、四驱传动系统16及发动机17位于主车架11的中部,后悬臂18、后减震系统19、进气过滤系统21及排气消音系统20均位于主车架11的车尾方向;
39.整体连接关系如下:所述非承载式车身2包络在全地形通用底盘1的上方,并通过橡胶软垫或弹簧与全地形通用底盘1主车架11柔性连接,非承载式车身2及其与主车架11的柔性连接增加了无人驾驶车辆的刚度和越野通过性能;
40.所述可视化系统3安装在非承载式车身2的顶部,两个所述定位系统4分别安装在非承载式车身2的车头和车尾;
41.所述可视化系统3采用了mimo-高频率便携式图传系统,可实现稳定的长距离传
输,并且可在区域内多台进行无线中继,形成mesh自组网,单台遥控距离≧20千米,配备了rs485通讯协议,可实现人员驾驶、遥控器接管、远程图传遥控三种模式,使无人驾驶车辆具备了驾驶和无人控制的多重功能,满足更多要求;
42.所述定位系统4采用激光雷达、gps/北斗系统及imu惯导组合的方式为无人驾驶车辆进行导航,提供无人驾驶车辆的位置数据;其中,所述gps/北斗系统可进行全球定位,所述imu惯导采用基于mems的六轴惯性传感器,通过使用基于卡尔曼滤波的传感器融合技术,融合了gps与惯性传感器数据,达到了良好的定位效果;所述激光雷达采用高精度的二维激光雷达,可以实现360度6米范围内的激光扫描,产生所在空间的平面点云地图信息可用于环境扫描与3d重建、通用的同步定位与地图构建(slam)、地图测绘、无人驾驶车辆定位导航等应用;此外,该定位系统4可进行差分gps的升级,对更精确定位的场地提供了技术接口。
43.其中,所述全地形通用底盘1的发动机17选用v型双缸四冲程水冷电喷汽油发动机,采用汽油燃烧驱动,通过ecu控制燃油喷射量与时间,实现精准的燃油消耗、有效控制尾气排放,体现燃油经济性、动力平顺性与排放环保性;在准结构化道路上测试,综合平均油耗为7-8l/100km,综合配备40l燃油油箱,可实现综合续航里程不低于400公里;
44.所述全地形通用底盘1的四驱传动系统16的前桥选用了电控强制锁止式差速器,四驱传动系统16的后桥选用了自动机械锁止式螺旋齿限滑差速器,前桥和后桥的差速器可有效对四轮输出力矩进行平衡,防止产生打滑,造成的动力浪费,有效提高了脱困能力;所述四驱传动系统16根据发动机的选型,还配比了cvt无级变速箱,cvt变速箱具有结构简单、紧凑,易于维修维护,可靠性高,控制方便等优点;cvt变速箱为无级变速,具备连续变速比,车辆换挡平顺,和发动机更易于匹配,具有很好的稳定性,同时,又保证了输出动力的快速响应和峰值扭矩的敏捷实现;因此,所述四驱传动系统16为无人驾驶车辆的控制提供了良好的硬件基础,从而实现了远程无人驾驶车辆的稳定、精准控制。
45.所述全地形通用底盘1的前悬臂12和后悬臂18均采用独立悬挂技术,可实现优越的越野性能和操控性能,同时大行程减震器的布置,使得无人驾驶车辆具备了很好的平稳性和舒适性;前悬臂12采用双a臂悬挂,后悬臂18采用多连杆独立悬挂;且前悬臂12和后悬臂18均采用铝合金铸造的结构,结构紧凑,强度高,方便维修更换,可模块化更换降低维修成本;
46.所述前减震系统13和后减震系统19均采用“螺旋弹簧 气动阻尼式”复合减振器,该复合减振器即为油气分离外置式阻尼可调式减震器,可实现阻尼可调,减振刚度和舒适性可自由调节以满足综合性能;
47.所述全地形通用底盘1的制动系统15采用四轮盘式cbs制动系统,四轮盘式cbs制动系统采用液压盘式制动方式,可有效提高制动性能和制动稳定性,将制动系统15升级为线控制动系统,既可进行驾驶制动,又可进行遥控制动;所述四轮盘式cbs制动系统包括:制动电机、制动电机控制器、制动主缸和制动卡钳;制动电机控制器控制制动电机转动,制动电机的转动通过丝杠转换为直线运动,丝杠前进时顶住制动主缸的活塞,进而给液压管路提供压力,所述液压管路的压力推动制动卡钳夹紧制动盘,实现制动;丝杠后退时,四轮盘式cbs制动系统不工作;四轮盘式cbs制动系统的制动控制实际就是对制动电机的力矩输出进行控制,控制方式为力矩控制。
48.所述全地形通用底盘1的转向系统14采用线控转向系统,参见附图5,通过执行机
构的改装优化,可实现遥控转向;所述线控转向系统包括:转向控制器、转向电机、转向柱和转向拉杆;转向控制器控制转向电机转动,转向电机转动电动转向柱转动,转向柱带动转向拉杆,转向拉杆带动无人驾驶车辆的车轮进行转向;转向控制实际就是对转向电机转动角度进行控制,控制方式为位置控制。
49.所述无人驾驶车辆的长度为3700毫米、宽度为2000毫米、高度为1500毫米;车轮轴距2285毫米;最小离地间隙≧350毫米;准结构化道路最高车速不低于90千米/小时,非结构化道路最高车速不低于60千米/小时;在速度为30
±
2千米/小时准结构化道路上,转弯半径不大于11米,其行驶中的循迹精度≦3米;车辆配备40l油箱,续航里程≧400千米(准结构化道路)。
50.工作原理:所述无人驾驶车辆具备人工驾驶、近距离现场遥控控制驾驶、远程无人驾驶三种功能;该无人驾驶车辆能够进行全局/局部路径规划,并根据规划路径实现自主循迹,要求能够对高于底盘高度350毫米和低于底盘高度350毫米且大于车轮间距的障碍物进行避障和绕行,并在有需求和必要时通过遥控接管车辆。
51.在进行远程无人驾驶中,可通过可视化系统3进行可视化操作监控实时显示回传该无人驾驶车辆前方路况图像/视频。同时,在远程主控台上实时显示并记录该无人驾驶车辆的行驶速度、发动机转速、行驶轨迹等信息,且能够回放存储的该无人驾驶车辆行驶过程数据;无人驾驶技术基于先进的开源autoware自动驾驶技术,根据区域功能的设计要求,进行后期程序开发,同时采用定位系统4为该无人驾驶车辆进行导航,提供位置数据;在区域边界处,编辑电子栅缆对无人驾驶车辆的越界进行告警,可自动停车,保障车辆安全。
52.因此,该无人驾驶车辆可作为高速军事模拟靶车,非承载式车身2可根据应用场景进行替换,分别用于开发边境巡逻车、智能运输车、多功能安防车、边防侦查车等军用、警用特种车辆;此外,该无人驾驶车辆还可在靶区内作为自动报靶系统车,用于其他靶标打靶情况的实时观测和动态报靶功能。
53.综上所述,以上仅为本实用新型的较佳实施例而已,并非用于限定本实用新型的保护范围。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。