1.本技术涉及玻璃加工技术的领域,尤其是涉及一种全自动玻璃分切设备。
背景技术:
2.在玻璃的规模化加工过程中,常将大块玻璃板经玻璃上料、玻璃切割和玻璃掰片等工艺流程进行分切裁块,以将大块玻璃板分切制作成玻璃窗、玻璃隔断等结构件所需尺寸的小块玻璃板。
3.相关技术中,一篇公告号为cn105776835a的中国专利文献公开了一种玻璃分切流水线,其技术要点是包括按照玻璃运动方向依次设置的全自动玻璃上料机、全自动玻璃切割机和玻璃掰片台。全自动玻璃上料机包括上料机机架、翻转机构、吸料机构和送料机构;翻转机构包括翻转电机、翻转架和旋转轴,旋转轴通过轴承与上料机机架连接,翻转电机与上料机机架固定连接,翻转电机驱动连接旋转轴,翻转架与旋转轴固定连接。吸料机构包括多个吸盘组,每个吸盘组分别与翻转架固定连接。
4.针对上述中的相关技术,发明人认为存在有以下缺陷:当玻璃板的长度大于翻转架的长度时,受吸盘组吸附的玻璃板的一端悬挑伸出翻转架,此时玻璃板悬挑伸出的一端在翻转过程中容易产生大幅晃动,而晃动的玻璃板容易发生弯折断裂。
技术实现要素:
5.为了使玻璃板伸出翻转架的一端在吸取翻转过程中不易发生晃动,本技术提供一种全自动玻璃分切设备。
6.本技术提供的一种全自动玻璃分切设备采用如下的技术方案:
7.一种全自动玻璃分切设备,包括按照玻璃运动方向依次设置的全自动玻璃上料机、全自动玻璃切割机和玻璃掰片台,所述全自动玻璃上料机包括上料机机架、翻转机构、吸料机构和送料机构,所述翻转机构包括翻转电机、翻转架和旋转轴,所述吸料机构包括多个第一吸盘组,每个第一吸盘组均与翻转架固定连接;所述翻转架远离旋转轴的一端设置有吸盘单元,所述吸盘单元包括滑动安装在所述翻转架上的滑移组件和设置在所述滑移组件上的第二吸盘,所述第二吸盘能够沿远离旋转轴的方向伸出所述翻转架,所述第二吸盘连通有吸气组件。
8.通过采用上述技术方案,当玻璃板的长度大于翻转架的长度时,工作人员通过滑移组件调节翻转架上的第二吸盘的位置,从而使第二吸盘沿远离旋转轴的方向伸出所述翻转架,从而使玻璃板的伸出翻转架的部分受第二吸盘的吸取夹持,此时玻璃在翻转过程中通过多个吸盘组以及第二吸盘的吸取而难以产生晃动,从而使玻璃板不易发生弯折断裂;然后翻转架将玻璃板翻转放置在上料机机架上,上料机机架上的送料机构将玻璃板传送至全自动玻璃切割机中进行玻璃切割,然后全自动玻璃切割机将玻璃板传送至玻璃掰片台供工作人员进行玻璃板的掰片工作。
9.可选的,所述滑移组件包括滑移板、螺纹杆和用于驱动所述螺纹杆进行转动的旋
转动力件;所述滑移板沿靠近或远离所述旋转轴的方向滑动安装于翻转架上;所述螺纹杆的一端螺纹连接在所述滑移板上,所述旋转动力件的一侧固定连接在翻转架上,所述旋转动力件的另一侧固定连接在所述螺纹杆的另一端。
10.通过采用上述技术方案,使用时,工作人员启动旋转动力件,旋转动力件驱动螺纹杆进行转动,转动的螺纹杆驱动滑移板沿靠近或远离旋转轴的方向进行转动,从而使滑移板上的第二吸盘的位置可调,此时工作人员依据玻璃板的实际尺寸而调整第二吸盘位于翻转架上的位置,使第二吸盘对玻璃板长度方向的一端进行稳定夹持。
11.可选的,所述螺纹杆为双头螺纹杆,所述双头螺纹杆的两端旋向相反,所述吸盘单元设置有两个,两所述吸盘单元的滑移板与双头螺纹杆的两端一一对应,两所述滑移板均螺纹装配于所述双头螺纹杆上。
12.通过采用上述技术方案,当玻璃板的长度小于翻转架的长度时,工作人员通过旋转动力件驱动双头螺纹杆进行正向转动,从而使双头螺纹杆上的两滑移板相互远离,使位于靠近旋转轴一侧的滑移板上的第二吸盘对玻璃板的端部进行稳定吸取;当玻璃板的长度大于翻转架的长度时,工作人员通过旋转动力件驱动双头螺纹杆进行正向转动,从而使双头螺纹杆上的两滑移板相互靠近,使位于靠近旋转轴一侧的滑移板上的第二吸盘对玻璃板的中部进行稳定吸取,使位于远离旋转轴一侧的滑移板上的第二吸盘对玻璃板的端部进行稳定吸取,从而实现玻璃板的稳定吸取;当玻璃板的尺寸与翻转架相近时,工作人员通过旋转动力件驱动双头螺纹杆进行反向转动,从而使双头螺纹杆上的两滑移板相互靠近,此时两滑移板上的第二吸盘共同进行玻璃盘的吸取,从而使玻璃板稳定的吸取固定在两第二吸盘和多个吸盘组上。
13.可选的,所述滑移组件包括滑移板和用于驱动所述滑移板直线运动的直线驱动件,所述滑移板滑动安装在所述翻转架上,且沿靠近或远离所述旋转轴的方向滑动;所述直线驱动件的一侧固定连接在翻转架上,所述直线驱动件的动力输出端固定连接在所述滑移板上。
14.通过采用上述技术方案,直线驱动件驱动滑移板沿靠近或远离所述旋转轴的方向滑动,从而使滑移板带动第二吸盘于翻转架上进行位置调节,方便工作人员依据玻璃板的大小而调节第二吸盘的安装位置。
15.可选的,所述翻转架上开设有滑槽,所述滑槽的延伸方向与滑移板的滑移方向相一致,所述滑移板滑动安装于所述滑槽内。
16.通过采用上述技术方案,螺纹杆或直线动力件驱动滑移板进行滑动的同时,滑移板还沿滑槽的延伸方向进行定向滑动,从而使滑移板稳定的沿靠近或远离旋转轴的方向进行稳定滑动,大幅提高了滑移板的滑移稳定性。
17.可选的,所述翻转架远离旋转轴的一端设置有用于对滑动的滑移板进行锁止的锁止组件。
18.通过采用上述技术方案,当滑移板部分滑移伸出翻转架时,工作人员通过锁止组件对滑移板进行快速锁止,从而使滑移板不易完全伸出翻转架,从而使滑移板通过锁止组件稳定的装配于翻转架上。
19.可选的,所述锁止组件包括电磁铁、铁块和弹簧,所述滑移板的一侧开设有安装槽,所述弹簧的一端固设于所述安装槽内侧壁上,所述铁块滑动安装于所述安装槽内,所述
铁块远离安装槽开口的一侧与弹簧的另一端相固定,当所述弹簧处于自由伸缩状态时,所述铁块位于所述安装槽内;所述翻转架远离旋转轴的一端开设有供铁块插接的插接槽,所述电磁铁固设于所述插接槽的内侧壁上。
20.通过采用上述技术方案,当工作人员需通过翻转架进行大块玻璃板夹取工作时,工作人员通过滑移组件将滑移板滑移伸出翻转架,该过程中工作人员调节电磁铁并使电磁铁处于通电状态,当滑移板上的安装槽正对翻转架上的插接槽时,安装槽内的铁块受电磁铁的磁吸力吸取插接入插接槽中,从而通过插块对滑移板的滑动进行限制,此时滑移组件停止工作,从而使滑移板锁止于翻转架的端口处。
21.可选的,所述插接槽沿翻转架的长度方向间隔开设有多个,多个所述插接槽内均设置有电磁铁。
22.通过采用上述技术方案,多个插接槽将滑移板滑出翻转架的长度分成短和长二种等级,从而便于工作人员依据实际需求而进行滑移板伸出翻转架长度的调节。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.工作人员通过滑移组件调节翻转架上的第二吸盘的位置,从而使第二吸盘沿远离旋转轴的方向伸出所述翻转架,此时玻璃板伸出翻转架的部分受第二吸盘吸取夹持,从而使玻璃在翻转过程中通过多个吸盘组以及第二吸盘的吸取而难以产生晃动;
25.2.旋转动力件驱动双头螺纹杆进行转动,从而使双头螺纹杆上的两滑移板相互靠近,使位于靠近旋转轴一侧的滑移板上的第二吸盘对玻璃板的中部进行稳定吸取,使位于远离旋转轴一侧的滑移板上的第二吸盘对玻璃板的端部进行稳定吸取,从而使玻璃板在翻转架上不易发生晃动;
26.3.当滑移板上的安装槽正对翻转架上的插接槽时,安装槽内的铁块受电磁铁的磁吸力吸取插接入插接槽中,从而通过插块对滑移板的滑动进行限制,此时滑移组件停止工作,从而使滑移板锁止于翻转架的端口处。
附图说明
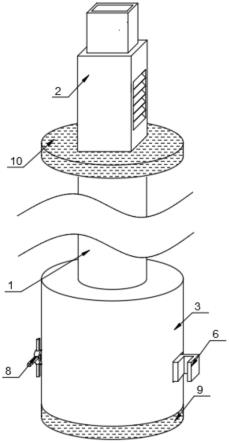
27.图1是本技术实施例一的整体结构示意图;
28.图2是本技术实施例一中翻转架、第一吸盘组、双头螺纹杆和滑移板的安装示意图;
29.图3是本技术实施例一中翻转架、电磁铁、双头螺纹杆和滑移板的爆炸图;
30.图4是本技术实施例一中翻转架的剖视结构示意图;
31.图5是本技术实施例二中翻转架、直线动力件和滑移板的安装示意图。
32.附图标记:1、全自动玻璃上料机;11、上料机机架;12、翻转机构;122、翻转架;1221、插接槽;1222、触碰槽;123、旋转轴;124、控制开关;13、吸料机构;131、第一吸盘;14、送料机构;141、送料辊;2、全自动玻璃切割机;21、切割台;22、龙门架;23、第一直线电机;24、第二直线电机;25、气缸;26、切割头;3、玻璃掰片台;31、搁置台;4、滑移组件;41、滑移板;411、安装槽;42、双头螺纹杆;421、延长杆;43、旋转动力件;431、伺服电机;44、滑块;45、直线驱动件;5、第二吸盘;6、滑槽;7、锁止组件;71、电磁铁;72、铁块;73、弹簧;8、触碰开关。
具体实施方式
33.以下结合附图1-5对本技术作进一步详细说明。
34.本技术实施例公开一种全自动玻璃分切设备。
35.实施例1
36.参照图1和图2,全自动玻璃分切设备包括按照玻璃运动方向依次设置的全自动玻璃上料机1、全自动玻璃切割机2和玻璃掰片台3。全自动玻璃上料机1包括上料机机架11、翻转机构12、吸料机构13和送料机构14;翻转机构12包括翻转电机、翻转架122和旋转轴123,旋转轴123水平布设且转动安装于上料机机架11的一侧,翻转电机固定于上料机机架11上,翻转电机的输出杆与旋转轴123长度方向的一端同轴焊接;翻转架122沿旋转轴123的长度防线等间距设置有四个,四个翻转架122的长度方向均与旋转轴123的长度方向相垂直,四个翻转架122长度方向的一端均与旋转轴123的周侧相焊接;吸料机构13包括四个第一吸盘组,四个第一吸盘组与四个翻转架122一一对应,每个第一吸盘组均包括两个第一吸盘131,两第一吸盘131均通过螺栓固定在翻转架122靠近旋转轴123的一端;两第一吸盘131沿翻转架122的长度方向以一米为间距进行布设;每个翻转架122远离旋转轴123的一端均设置有吸盘单元,吸盘单元包括滑动安装在翻转架122上的滑移组件4和设置在滑移组件4上的第二吸盘5,第二吸盘5能够沿远离旋转轴123的方向伸出翻转架122,第二吸盘5和四个第一吸盘131组共同连通有吸气组件。
37.参照图1和图2,滑移组件4包括两个滑移板41、螺纹杆和用于驱动螺纹杆进行转动的旋转动力件43;翻转架122远离旋转轴123的一端开设有滑槽6,滑槽6的延伸方向与翻转架122的长度方向相一致,滑槽6的开口朝向远离上料机机架11的方向。螺纹杆为两端旋向相反的双头螺纹杆42,双头螺纹杆42的长度方向与翻转架122的长度方向相一致,双头螺纹杆42长度方向的两端均与滑槽6的内侧壁转动连接,且转动轴线均与翻转架122的长度方向相一致。
38.参照图1和图2,两滑移板41朝向双头螺纹杆42的一侧一体成型有滑块44,两滑块44一一螺纹装配于双头螺纹杆42长度方向的两端,两滑块44宽度方向的两侧均与滑槽6的内侧壁相贴合,两滑块44远离滑槽6开口的一端与滑槽6的内壁相贴合。翻转架122远离旋转轴123的一端开设有供滑移板41滑移穿出的穿孔,每个滑移板41远离上料机机架11的一端通过螺栓固定两个第二吸盘5,两个第二吸盘5沿滑移板41的长度方向布设;当位于翻转架122远离旋转轴123的一端的滑移板41部分滑移伸出翻转架122时,该滑移板41上的一第二吸盘5伸出翻转架122。
39.参照图2和图3,旋转动力件43可以为伺服电机431、步进电机、旋转油缸等,本实施例中优选为伺服电机431,伺服电机431位于双头螺纹杆42靠近旋转轴123的一侧,伺服电机431通过螺栓固定于翻转架122上,伺服电机431的输出端同轴焊接有延长杆421,延长杆421与双头螺纹杆42同轴,延长杆421远离双头螺纹杆42的一端与双头螺纹杆42相焊接。使用时,伺服电机431驱动延长杆421进行转动,转动的延长杆421带动双头螺纹杆42进行同轴转动,从而使双头螺纹杆42上的两个滑移板41相互靠近或远离;当两滑移板41相互远离时,位于翻转架122远离旋转轴123最远端的滑移板41滑移伸出翻转架122,从而便于该滑移板41上的第二吸盘5对玻璃板伸出翻转架122的一端进行加强吸附,使玻璃板在吸取过程中不易发生晃动。
40.参照图3和图4,翻转架122远离旋转轴123的一端设置有锁止组件7,锁止组件7包括电磁铁71、铁块72和弹簧73,滑移板41的滑块44上于远离滑槽6开口的一侧面开设有安装槽411,弹簧73的一端焊接于安装槽411的一内侧壁上,铁块72滑动安装于安装槽411内,铁块72的周侧与安装槽411的内周壁相贴合,铁块72朝向弹簧73的一端与弹簧73相焊接;当弹簧73处于自由伸缩状态时,铁块72位于安装槽411内。翻转架122上开设有供铁块72插接的插接槽1221,插接槽1221开设于翻转架122远离旋转轴123的一端的滑槽6内壁上,且插接槽1221沿翻转架122的长度方向间隔开设有两个,两个插接槽1221的深度均小于铁块72的厚度;每个插接槽1221的内底壁上均粘接有电磁铁71,电磁铁71与外部电源电性连接;通过电磁铁71对铁块72进行磁吸,以使铁块72快速插入插接槽1221中,从而通过铁块72与插接槽1221的插接配合,实现对滑移板41的快速锁止。
41.参照图1和图4,上料机机架11上设置有与电磁铁71信号连接的控制开关124,控制开关124用于控制电磁铁71的通电或断电。两个插接槽1221的内侧壁上均开设有触碰槽1222,触碰槽1222内安装有触碰开关8,触碰开关8的触碰端弹性突出触碰槽1222,触碰开关8与伺服电机431信号连接,触碰开关8用于控制伺服电机431的开启或关闭;使用时,工作人员按压触碰开关8,从而使电磁铁71通电,当滑动的滑移板41上的安装槽411对准一插接槽1221时,电磁铁71吸附铁块72并使铁块72插入至插接槽1221中,此时铁块72对触碰开关8的触碰端进行按压,然后触碰开关8控制伺服电机431停止工作,从而使滑移板41精准的停止于所在位置上。
42.参照图1,送料机构14包括多个送料辊141,多个送料辊141通过位于上料机机架11底部的同步链进行同步驱动,相邻两个送料辊141之间均留有供翻转架122伸入的空隙,上料机机架11安装有用于驱动同步链进行传动的传动电机。
43.参照图1,全自动玻璃切割机2包括切割台21、龙门架22、第一直线电机23、第二直线电机24、气缸25和切割头26;切割台21与多个送料辊141的端面相平齐,切割台21的长度方向与翻转架122的长度方向相垂直,切割台21上间隔开设有四个通槽,四个通槽内一一传动安装有传送带,四条传送带的传输方向均与切割台21的长度方向相一致,四个传送带分别通过一驱动电机进行驱动;四个传送带的顶面均略高于切割台21的顶面。龙门架22架设在切割台21上,且沿切割台21的长度方向滑动安装于切割台21上;第一直线电机23设置有两个,且对称设置于切割台21宽度方向的两端,两第一直线电机23的驱动方向均与切割台21的长度方向相一致,两第一直线电机23的滑块44分别与龙门架22通过螺栓进行固定;第二直线电机24通过螺栓安装在龙门架22上,第二直线电机24的输出方向与切割台21的长度方向相垂直,气缸25固定在第二直线电机24的滑台上,气缸25的活塞杆沿竖直朝下,气缸25与外部供气组件相连接,切割头26固定在气缸25的活塞杆上。使用时,通过第一直线电机23、第二直线电机24和气缸25实现切割头26于切割台21上的三维移动,从而便于切割头26进行玻璃的切割作业。
44.参照图1,玻璃掰片台3包括搁置台31以及设置在搁置台31内的抽气组件,搁置台31上呈矩阵状开设有多个抽气孔,每个抽气孔均与抽气组件之间连通有抽气软管;在工作人员进行玻璃的掰片时,细碎的玻璃碎粒通过抽气孔抽入抽气组件中进行收集。
45.本技术实施例全自动玻璃分切设备的实施原理为:使用时,伺服电机431驱动双头螺纹杆42进行转动;转动的双头螺纹杆42驱动滑块44进行定向滑动,从而通过滑块44带动
两滑移板41相互远离,从而使一滑移板41的一端滑移伸出翻转架122,此时滑移板41上的一第二吸盘5伸出翻转架122。然后翻转电机驱动旋转轴123进行转动,转动的旋转轴123带动四个翻转架122进行翻转,当翻转架122与玻璃板相平齐使,四个翻转架122上的第一吸盘131和第二吸盘5对玻璃板进行吸附。然后翻转电机驱动旋转轴123进行反转,此时四个翻转架122翻转退回至上料机机架11上,第一吸盘131和第二吸盘5对玻璃板停止吸附,从而使玻璃板搁置在多个送料辊141。然后多个送料辊141将玻璃板传送至全自动玻璃切割机2上,供全自动玻璃切割机2进行玻璃板的切割,然后全自动玻璃切割机2将切割后玻璃板传至玻璃掰片台3中进行玻璃的掰片作业。
46.实施例二
47.参照图5,滑移组件4包括滑移板41和用于驱动滑移板41直线运动的直线驱动件45,滑移板41沿旋转轴123的长度方向滑动安装在翻转架122上,翻转架122远离滑移板41的一端开设有供滑移板41滑移伸出的穿孔,滑移板41长度方向的两端均安装有第二吸盘5,位于远离旋转轴123的一第二吸盘5能够随滑移板41的滑动而伸出翻转架122。直线驱动件45为电动推杆,在其他实施例中,直线驱动件45还可以为气动推杆、直线电机等;电动推杆的一侧通过螺栓固定连接在翻转架122上,电动推杆的活塞端与滑移板41靠近旋转轴123的一端相固定,电动推杆的活塞杆的输出方向与翻转架122的长度方向相一致。使用时,电动推杆推动滑移板41进行滑移,滑移板41部分伸出翻转架122,从而使滑移板41上的一第二吸盘5伸出翻转架122,从而通过该第二吸盘5对玻璃板伸出翻转架122的一端进行吸附。
48.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。