1.本实用新型涉及机器人技术领域,具体涉及一种水陆两栖机器人结构。
背景技术:
2.目前,随着现代社会的发展,国内外领域中,机器人技术越来越受到重视,更加往智能化方面发展,既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。目前,机器人的形态各式各样,为了完成更多的任务,机器人不仅需要在陆地上行走,还需要在水面行走,现有的水陆两栖机器人在陆地上和在水里使用的行走机构大多为同一个,即使水陆使用不同的行走机构,大多数的机器人在下水时候,陆用的行走机构也会浸入水中一直泡着,这对行走机构的密封性要求比较高,密封性稍差就可能导致机器人内部进水影响机器人的稳定性。
技术实现要素:
3.本实用新型的目的是针对现有技术存在的不足,提供一种水陆两栖机器人结构。
4.为实现上述目的,本实用新型提供了一种水陆两栖机器人结构,包括机体、固定架、太阳能电池板、气囊和螺旋桨总成,所述机体内设有控制器,所述机体两侧设有陆用行走机构,所述机体与固定架之间通过多个第一电动伸缩杆连接,所述陆用行走机构与固定架之间留有空隙,所述太阳能电池板固定在机体顶部并与控制器电性连接,所述固定架两侧均固定连接有气囊,所述螺旋桨总成没有叶片的一侧与机体尾部铰接,另一侧与固定架之间设有第二电动伸缩杆,所述第二电动伸缩杆两端分别与固定架和螺旋桨总成铰接,所述第一电动伸缩杆和第二电动伸缩杆分别与控制器连接,所述控制器无线连接有遥控终端。
5.进一步的,所述机体内从上至下为控制腔和传动腔,所述控制器固定在控制腔中,所述控制腔中还设有与控制器电性连接的第一电机,所述第一电机与陆用行走机构传动连接。
6.进一步的,所述螺旋桨总成包括防水外壳、第二电机、传动轴以及螺旋桨,所述第二电机固定连接在防水外壳内,第二电机的输出轴通过传动轴与螺旋桨固定连接,所述传动轴与螺旋桨连接的一端以及螺旋桨位于防水外壳外,所述传动轴与防水外壳可转动连接,并且两者之间做防水密封处理。
7.进一步的,所述第二电机为防水电机。
8.进一步的,所述第一电动伸缩杆数量为4个,均匀且对称的设置在机体两侧,所述机体的上端设有外凸的固定台,第一电动伸缩杆的底部与固定台下端面固定连接,第一电动伸缩杆的推杆与固定架上端面固定连接。
9.进一步的,所述机体尾部设有安装槽,所述固定架尾部中段设有向上突起的让位槽,便于螺旋桨总成的安装。
10.进一步的,所述固定架头部设有防撞板。
11.有益效果:本实用新型在水面和陆地使用不同的行走机构,在水上时利用第一电动伸缩杆将机体抬升,减少与水的接触,防止机体长时间浸在水中发生渗水现象;机体的控制腔在机体上部,更大程度的防止了水进入控制腔,保证了机器人的稳定性;同时本实用新型能够利用太阳能供电,节约能源。
12.本实用新型结构简单,能够同时在水面和陆地工作,有效防止机体内部的控制腔进水,保证了机器人工作的稳定性。
附图说明
13.图1是本实用新型实施例的水陆两栖机器人结构的结构示意图;
14.图2是本实用新型实施例的机体与固定架的连接结构示意图;
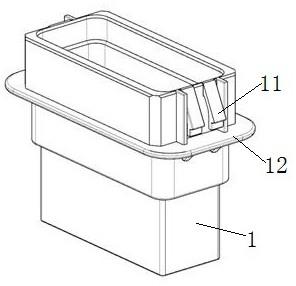
15.图3是本实用新型实施例的螺旋桨总成的安装结构示意图;
16.图4是本实用新型实施例的螺旋桨总成的工作状态示意图。
17.图中:1、机体;2、固定架;3、太阳能电池板;4、气囊;5、螺旋桨总成;6、陆用行走机构;7、第一电动伸缩杆;8、第二电动伸缩杆;9、防撞板;10、防水外壳;11、螺旋桨;12、天线;13、固定台。
具体实施方式
18.下面结合附图和具体实施例,进一步阐明本实用新型,本实施例在以本实用新型技术方案为前提下进行实施,应理解这些实施例仅用于说明本实用新型而不用于限制本实用新型的范围。
19.如图1至4所示,本实用新型实施例提供了一种水陆两栖机器人结构,包括机体1、固定架2、太阳能电池板3、气囊4和螺旋桨总成5,机体1内设有控制器,机体1两侧设有陆用行走机构6,机体1与固定架2之间通过多个第一电动伸缩杆7连接,具体的,第一电动伸缩杆7数量为4个,均匀且对称的设置在机体1两侧,机体1的上端设有外凸的固定台13,第一电动伸缩杆7的底部与固定台13下端面固定连接,第一电动伸缩杆7的推杆与固定架2上端面固定连接,即第一电动伸缩杆7是倒置安装的,第一电动伸缩杆7内部的电机远离水面,使第一电动伸缩杆7不易进水损坏。
20.陆用行走机构6与固定架2之间留有空隙,便于陆用行走机构6工作,太阳能电池板3固定在机体1顶部并与控制器电性连接,固定架2两侧均固定连接有气囊4,固定架2头部设有防撞板9,防撞板9优选弹性板,如橡胶板。
21.螺旋桨总成5没有叶片的一侧与机体1尾部铰接,另一侧与固定架2之间设有第二电动伸缩杆8,第二电动伸缩杆8两端分别与固定架2和螺旋桨总成5铰接,与第一电动伸缩杆7同理,第二电动伸缩杆8也是倒置安装,第二电动伸缩杆8的底部与固定架2铰接,第二电动伸缩杆8的推杆与螺旋桨总成5铰接。机体1尾部设有安装槽,固定架2尾部中段设有向上突起的让位槽,便于螺旋桨总成5的安装。螺旋桨总成5为现有的集成器件,结构主要包括防水外壳10、第二电机、传动轴以及螺旋桨11,第二电机优选防水电机,第二电机固定连接在防水外壳10内,第二电机的输出轴通过传动轴与螺旋桨11固定连接,传动轴与螺旋桨11连接的一端以及螺旋桨11位于防水外壳10外,传动轴与防水外壳10可转动连接,并且两者之间做防水密封处理,即水无法进入螺旋桨总成5内部。
22.第一电动伸缩杆7和第二电动伸缩杆8分别与控制器连接,机体1顶部还设有与控制器电性连接的天线12,控制器无线连接有遥控终端,通过遥控终端可对机器人进行遥控。
23.机体1内从上至下由隔板分为控制腔和传动腔,控制器固定在控制腔中,控制腔中还设有与控制器电性连接的第一电机,第一电机固定安装在控制腔中,第一电机与陆用行走机构6传动连接,陆用行走机构6为常见的利用轮子移动的行走机构,其传动杆位于传动腔内,第一电机的输出轴从隔板上的通孔穿出到传动腔中,第一电机输出轴与陆用行走机构6的传动杆之间利用涡轮蜗杆原理进行传动。控制腔中还设有与控制器电性连接的锂电池,机器人工作时电源优先太阳能电池板3供电,锂电池作为备用电源。
24.在使用时,通过遥控终端对机器人进行控制,在陆上的时候通过陆用行走机构6移动,在到水里的时候,由于气囊4浮力,机器人浮在水面,此时轮子以及机体1下端浸在水中,控制第一电动伸缩杆7伸出,机体1逐渐上移,使机体1和轮子均高于水面,避免机体1长时间与水接触,在第一电动伸缩杆7伸出时,第二电动伸缩杆8也要进行伸出,螺旋桨总成5逐渐倾斜,最终螺旋桨11浸入水中,机器人利用螺旋桨总成5在水中的移动。
25.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,其它未具体描述的部分,属于现有技术或公知常识。在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。