1.本发明涉及一种用于测量设备、尤其用于坐标测量机器(cmm)、并且另选地或互补地用于机床、尤其用于计算机化数控机器(cnc)的非接触式感测单元。具体地说,该非接触式感测单元可以是用于尺寸和/或表面特性(例如,粗糙度)测量的彩色白光感测(cws)系统的一部分。
背景技术:
2.cws测量系统依靠由光源(例如,多色光源)产生的白光照射待测量表面。cws测量系统包括光学探测装置,该光学探测装置具有光学物镜,用于将该光的不同波长聚焦在距该光学探测装置不同的距离处。该表面然后将基本上反射被聚焦的波长,同时分散其他波长。该表面与该光学探测装置之间的距离然后可以尤其通过波长分析器确定返回光的波长来推导出,该光有利地通过该光学探测装置的同一光学物镜返回。该光学探测装置有利地被配置成尤其借助于光学物镜进一步过滤该表面上的未聚焦的波长,即提供返回光的空间滤波。
3.wo 2009062641和ep 2667147公开了用于cmm的cws测量系统的示例,该cws测量系统包括非接触式感测单元,该非接触式感测单元具有被配置成用于与cmm接口的光学探测装置。
4.更具体地说,wo200906264公开了一种cws测量系统,该系统包括cws非接触式感测单元,该cws非接触式感测单元被配置成连接至安装在cmm机的铰接臂上的cws单元保持器。该cmm机包括cws控制器,该cws控制器具有光源和分析器,而该cws非接触式感测单元包含该光学探测装置,该光学探测装置被适配成借助于多模光纤光学地连接至该cws单元保持器。非接触式感测单元不仅被配置成将来自cws控制器的光聚焦在给定表面上,而且通过同一多模光纤将由表面反射的光收集并引导到cws分析器中。
5.当cws非接触式感测单元安装在线性cmm上或安装在桥式cmm竖直臂上时,该cws测量系统可以提供工件的基本上凸形或平坦的外表面的有效且快速的测量。然而,它缺乏用于测量更复杂的表面的通用性。
6.为了增加测量通用性,ep 2667147公开了一种cws测量系统,该系统包括安装在cmm的铰接式探头上的cws感测单元。采取光学笔形式的cws感测单元包括光源、波长检测器和可互换色散光学单元。所增加的测量通用性被cws感测单元的更复杂的组装以及在测量期间必须由探头处理的cws感测单元的重量和尺寸的增加所抵消。
7.上述cws测量系统不适用于集成具有不同形状和/或大小的若干光学探测装置。此外,如wo 2009062641和ep 2667147中所公开的,将光学探测装置集成在cmm机的cws非接触式感测单元中可能难以实现,这是因为非接触式感测单元必须由cmm在任何可能的位置中精确地且永久地支撑,不仅独立于光学探测器的定向和运动,而且与一系列光学探测装置无关。因此,将这种光学探测装置高效集成在cws非接触式感测单元中比较昂贵。
8.us2018/0172442公开了一种用于附接至定位器的探头的尺寸探测单元。该探测单
元包括:测量探测器,该测量探测器用于对物体进行尺寸测量;转动接头,该转动接头被集成到测量探测器中;以及探测单元接口,该探测单元接口用于与探头重复地可拆卸地连接。探测单元接口通过转动接头可旋转地连接至测量探测器。
9.因此,测量探测器壳体相对于探测单元接口可旋转地安装,这不方便仅提供测量探测器的粗略定位。
技术实现要素:
10.因此,本发明的目的是提供一种用于测量设备或机床的非接触式感测单元,该非接触式感测单元至少部分地克服了现有技术的缺点和限制。
11.更具体地说,本发明的目的是提供一种非接触式感测单元,该非接触式感测单元可以适应具有不同尺寸和形状的若干类型的光学探测装置并且允许该非接触式感测单元的精密定位。
12.本发明的另一目的是提供一种非接触式感测单元,该非接触式感测单元能够以健壮方式独立于该非接触式感测单元的定向和移动而将该光学探测装置精确地且永久地保持在给定位置中。
13.根据本发明,这些目的通过一种用于测量设备或机床(例如,cmm、cnc)的非接触式感测单元来实现,其中,该非接触式感测单元包括光学探测装置、用于与该测量设备或机床的互补联接元件机械地连接的联接元件、以及用于容纳该光学探测装置的壳体。该壳体机械地连接至该联接元件。该光学探测装置包括位于该光学探测装置的第一部分的远端处的光学物镜,以用于感测工件的表面。该非接触式感测单元进一步包括用于调节该光学探测装置相对于该壳体的紧固部分的相对轴向位置、径向位置和/或角位置(即,调节该光学探测装置相对于该紧固部分的相对轴向位置和/或相对径向位置和/或相对角位置)的套环。预对准尤其提供了对光学探测装置的一个或多个光学操作参数的调节(例如,微调、不确定性降低)。该套环基本围绕该光学探测装置的不同的第二部分周向地夹紧该光学探测装置。第一部分被定位成比第二部分更靠近带测量工件的表面。该联接元件还可以提供与该互补联接元件光学连接的光学连接件。光学探测装置可以尤其通过光纤、另选地或补充地通过一个或多个透镜和/或反射镜光学地连接至非接触式感测单元的联接元件。
14.为了清楚起见,下文将第一部分称为下部,而将第二部分称为上部。术语“上”是指朝向测量所依赖的光源(沿着光学探测装置的光路),而“下”是指朝向待测量的物体(沿着光学探测装置的光路)以进行测量。该光路尤其对应于光行进至该光学探测装置中的光学物镜和/或从该光学物镜行进的路径。术语“轴向位置”是指光学探测装置沿着其纵向轴线的位置。术语“径向位置”是指光学探测装置垂直于其纵向轴线的位置。
15.在一个实施方式中,套环与非接触式感测单元的联接元件刚性地联合,以用于将光学探测装置相对于联接元件维持在稳定的轴向位置和/或角位置以用于精确测量。
16.该非接触式感测单元的壳体可以包括用于容纳该光纤(另选地或补充地,该一个或多个透镜和/或反射镜将该光学探测装置光学地连接至该联接元件)和/或用于(刚性地)连接该联接元件的第一壳体部分,并且优选地包括基本容纳该光学探测装置的第二壳体部分。
17.该非接触式感测单元(尤其是壳体,例如该第一壳体部分和/或第二壳体部分、和/
或该联接元件)包括用于机械地连接(例如刚性地固定和/或接收)该套环的紧固部分。该紧固部分可以尤其采取环形平坦座部的形式,该套环抵靠该环形平坦座部而被固定。
18.在一个实施方式中,该非接触式感测单元的联接元件直接地或通过附加接口刚性地连接至该壳体、尤其连接至该第一壳体部分,以用于提供该光学探测装置相对于该联接元件的稳定定位。
19.在一个有利实施方式中,该套环具有等于(或至少类似)该光学探测装置(尤其是其主体)的热膨胀系数的热膨胀系数。优选地,套环由与光学探测装置(的主体)相同的材料制成,典型地是由钢制成。
20.在一个有利实施方式中,该套环设置有夹紧力调整器(例如,采取具有力调整螺钉的弹性套环的形式),以用于调整和/或调节抵靠该光学探测装置的夹紧力。夹紧力调整器的使用不仅提供了对光学探测装置的轴向位置、径向位置和角位置的调节,而且还提供了对由套环施加到光学探测装置上的夹紧力的微调和/或调整,以不仅保证消除振动和/或温度引起的滑移效应,还保证光学探测装置的物理完整性。
21.在一个实施方式中,该光学探测装置具有基本圆柱形主体,并且该套环是夹紧该圆柱形主体的上部的可调节环。该可调节环可以包括力调整螺钉,该力调整螺钉有利地防止该光学探测装置的粘滑效应,该效应可能由振动和/或温度变化引起。有利地,套环由热膨胀等于(或至少类似于)圆柱形主体的热膨胀的一种或多种材料(例如,合金)制成。优选地,套环由与圆柱形主体相同的材料制成。
22.包括基本围绕其上部周向地夹紧光学探测装置的套环的非接触式感测单元具有的优点是不依赖于探测装置的具体类型(尤其是其形状和尺寸),并且因此可以与各种光学探测装置一起使用。此外,套环以低于1mm的轴向和径向分辨率和低于1
°
的角分辨率提供非接触式感测单元内的夹紧的光学探测装置的准确的轴向、径向和角位置。
23.在一个有利实施方式中,该非接触式感测单元包括用于存储与该光学探测装置(尤其是其光学物镜)的轴向和/或径向和/或角位置相关的操作参数的数据存储电路。光学探测装置的轴向和/或径向和/或角位置通过套环来实现(例如,调节)和/或可行。
24.操作参数可以是或表示:
[0025]-该光学探测装置的尤其与虚拟或物理参考相关的轴向和/或径向和/或角位置;
[0026]-该光学探测装置的尤其与参考位置相关的轴向和/或径向和/或角度调节;
[0027]-该光学探测装置的轴向和/或径向和/或角位置与轴向和/或径向和/或角参考位置的偏差;和/或
[0028]-将被提供给测量设备或机床的非接触式感测单元的尤其与待测量的工件相关的轴向和/或径向和/或角位置。
[0029]
可以在工厂组装非接触式感测单元的过程中存储操作参数。另选地或补充地,可以在校准过程期间存储操作参数。该非接触式感测单元可以被配置成(向该测量设备或机床)提供对该数据存储电路的无线、有线和/或光学访问。
[0030]
在一个具体实施方式中,该联接元件被配置成向该数据存储电路提供电力和/或传输数据。
[0031]
在一个实施方式中,该第二壳体部分包括围绕该光学探测装置的光学物镜的开口。该第二壳体部分还可以包括环,该环被配置成与该光学物镜和/或该光学探测装置(尤
其是与环形倒角16)的表面相接触,以用于减少振动和/或用于吸收冲击和/或用于避免水和/或灰尘侵入该非接触式感测单元的内部容积中。
[0032]
该光学探测装置可以尤其被配置成通过该光学物镜来管理所发射的光和/或所感测到的光。具体地说,该光学探测装置可以被配置成通过该联接元件提供的光学连接件(例如,光纤)来聚焦和/或发射光和/或在由该联接元件提供的光学连接件(例如,光纤、透镜、反射镜)内收集该工件的表面反射的光。
[0033]
光学探测装置可以是以下各项的一部分:彩色(chromatic)距离感测系统(例如,彩色白光(chromatic white light)感测系统)、干涉测量距离感测系统、光学粗糙度感测系统、光学轮廓仪和/或检查相机系统。
[0034]
在一个实施方式中,该光学探测装置包括以下元件中的一个或组合:色散光学单元、彩色距离传感器、干涉测量距离传感器、光学粗糙度传感器、光学轮廓仪、检查光学单元以及检查相机。
[0035]
在一个特别有利的实施方式中,该光学探测装置是彩色距离感测系统的一部分,而该光学物镜被配置成用于将不同波长的(所提供的)光聚焦在距该光学探测装置不同的距离处,并且优选地用于从返回光中过滤该表面上未聚焦的波长(即,返回光的空间过滤)。因此,光学物镜可以采取如下形式:色散透镜、色散光学器件、色散透镜系统或色散透镜组件。
[0036]
本发明的另一方面涉及包括如上所述的非接触式感测单元的测量设备或机床,尤其是坐标测量机。该测量设备或机床包括互补联接元件,该互补联接元件连接至该非接触式感测单元的联接元件。该互补联接元件可以是用于对该非接触式感测单元进行定向和/或定位的铰接式探头的一部分。优选地,该非接触式感测单元被配置成在静态配置或动态配置中测量尺寸或表面特性,在该静态配置中,该铰接式探头处于静止状态,在该动态配置中,该铰接式探头在该非接触式感测单元测量尺寸或表面特性的同时连续地移动。静态定向和/或定位可以(另选地或补充地)由操作员手动地提供。该铰接式探头可以被配置成提供该非接触式感测单元的可分度的和/或连续的定向和/或定位。有利地,该铰接式探头可以被配置成提供该非接触式感测单元围绕2个或3个旋转轴线的定向。有利地,测量设备或机床可以配备有旋转台,待测量的工件可以被定位在该旋转台上。该旋转台可以单独地或与该铰接式探头协作地支撑该测量设备或机床,尤其是在以闭环配置(例如,在未知工件的情况下,没有向该测量设备或机床提供模型)或以开环配置(例如,在该测量设备或机床例如通过cad或3d模型而具有对该工件的描述的情况下)扫描工件时。
[0037]
因此,通过允许沿着多个定向测量非平坦工件增加了测量通用性,而不需要手动重新定位该工件。
[0038]
此外,由套环提供的光学探测装置的准确的轴向和/或径向定位和/或角度定位允许通过减小由非接触式感测单元中的光学探测装置的制造和/或组装引起的光学操作不确定性(即,公差范围,尤其与操作范围和轴线、对准和/或操作容器相关的公差范围)来优化测量以及校准过程。此外,数据存储电路实现自动或半自动测量和/或校准过程。
[0039]
本发明的另一方面涉及一种通过非接触式感测单元来测量工件的尺寸或表面特性(例如,粗糙度)的方法。该非接触式感测单元包括:光学探测装置,该光学探测装置具有用于感测工件的光学物镜;联接元件,该联接元件用于机械地连接至测量设备或机床的互
补联接元件;以及壳体,该壳体机械地连接至该联接元件并且被配置成用于容纳该光学探测器。该方法包括光学探测装置相对于非接触式感测单元(例如,相对于其紧固部分)的预对准,即。通过该套环对该光学探测装置相对于该非接触式感测单元的紧固部分的相对轴向和/或径向位置和/或相对角位置进行调节,以便提供该光学探测装置的给定轴向、径向和/或角位置。该方法还包括:确定与该光学探测装置的所述给定轴向和/或径向和/或角位置相关(依赖于所述给定轴向和/或径向和/或角位置)的操作参数;以及将该操作参数存储在该非接触式感测单元的数据存储电路中。
[0040]
可以通过围绕该光学探测装置的表面夹紧该套环和/或将该套环固定至该非接触式感测单元的紧固部分来实现在该非接触式感测单元内对该光学探测装置的调节。
[0041]
该方法还可以包括以下步骤:通过该测量设备或机床的互补联接元件将该非接触式感测单元附接至测量设备或机床;在该测量设备或机床中读取(有利地自动读取)存储在该非接触式感测单元的数据存储电路中的与该光学探测装置的轴向、径向和/或角位置相关的参数;以及提供依赖于所读取的参数的所述工件的所述尺寸或表面特性的所述测量。
附图说明
[0042]
本发明的示例性实施方式在说明书中公开并且通过附图示出,在附图中:
[0043]
图1示意性地示出了根据实施方式的安装在cmm的铰接式探头中的非接触式感测单元;
[0044]
图2示出了根据实施方式的非接触式感测单元的立体图;
[0045]
图3示出了图2的轴向截面图;以及
[0046]
图4示出了图2的分解图。
[0047]
附图标记列表
[0048]
测量设备或机床,例如,坐标测量机1
[0049]
非接触式感测单元10
[0050]
电路11
[0051]
光学探测装置12
[0052]
数据存储电路13
[0053]
圆柱形主体14
[0054]
上部14a
[0055]
光纤连接器接收部分14c
[0056]
光纤连接器15
[0057]
下部14b
[0058]
环形倒角16
[0059]
平坦环形部分17
[0060]
第一光学物镜18a
[0061]
第二光学物镜18b
[0062]
光路19
[0063]
探测器壳体20
[0064]
第一壳体部分20a
[0065]
顶表面21
[0066]
环形平坦座部22
[0067]
螺纹部分23
[0068]
套环24
[0069]
螺钉24b
[0070]
夹紧环
[0071]
力调整螺钉25
[0072]
第二壳体部分20b
[0073]
第一圆筒部29a
[0074]
第二圆柱部29b
[0075]
倾斜环形座部26a
[0076]
平坦环形座部26b
[0077]
开口27
[0078]
密封环/o型环28
[0079]
纵向轴线29
[0080]
联接元件30a
[0081]
电连接件31a
[0082]
光学连接件32a
[0083]
光纤40
[0084]
焦距41
[0085]
焦轴42
[0086]
焦点43
[0087]
扫描铰接式探头50
[0088]
互补联接元件30b
[0089]
互补电连接件31b
[0090]
互补光学连接件32b
具体实施方式
[0091]
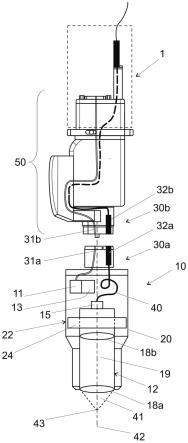
本发明涉及一种如图1中所示的用于测量设备或机床1的非接触式感测单元10。该非接触式感测单元10包括光学探测装置12和联接元件30a,该联接元件30a用于机械地连接至该测量设备或机床1上(可能位于其铰接式探头50上)的互补联接元件30b。
[0092]
光学探测装置12包括一个或多个光学物镜,例如,第一物镜18a和第二物镜18b,以非接触式感测工件的表面,以便提供尺寸或表面特性测量。光学探测装置12可以被配置成允许手动或自动替换该一个或多个光学物镜18a、18b。
[0093]
具体地说,光学探测装置12可以(机械地)被配置成借助于一个或多个光学物镜18a、18b抵靠工件的表面(以预定方式)发射光以用于尺寸或表面特性测量。光学探测装置12可以尤其借助于如图3和图4所示的连接器接收部分14c收集来自光源的光。连接器接收部分14c可以是气隙接收连接器,或者可以被布置成与光纤连接器15协作。
[0094]
另选地或补充地,光学探测装置12可以(机械地)被配置成借助于一个或多个光学
物镜18a、18b来(以预定方式)收集由工件的表面反射的光以用于尺寸或表面特性测量。光学探测装置可以借助于部分14c返回所收集的光,该部分14c可以对应于如图1所示的用于收集光的接收部分14c。
[0095]
根据本发明,光可以是可以被人眼感知和/或具有紫外(uv)和/或红外(ir)光谱中的波长的任何电磁辐射。
[0096]
因此,光学探测装置12可以采取(多个)物镜组件或单元的形式,其中,一个光学对象18a被定位在光学探测装置12的远端处。
[0097]
术语“远端”是指该装置的指向待测量物体的端部。
[0098]
光学探测装置12可以是以下系统的一部分:彩色距离感测系统,例如彩色白光感测系统、干涉测量距离感测系统、光学粗糙度感测系统、光学轮廓仪和/或检查相机系统。具体地说,光学探测装置12可以采取以下形式:色散光学单元、彩色距离传感器、干涉测量距离传感器、光学粗糙度传感器、光学轮廓仪、检查光学单元以及检查相机。
[0099]
光学探测装置12可以是测量系统的一部分,该测量系统提供:工件的尺寸或表面特性的点对点(点状(punctual))测量;和/或工件的尺寸或表面特性的扫描(即,通过连续感测获得的一系列点状测量)。扫描可以在开环或闭环中执行,即,具有或不具有工件的几何形状的先验知识,该先验知识特别地通过cad文件提供。在闭环配置中,光学探测装置12(还)用于实时监测工件的位置。
[0100]
在图1的示例性实施方式中,光学探测装置12是cws测量系统的彩色共焦传感器。根据本发明,彩色共焦传感器可以是被配置成将不同波长的光聚焦在距光学物镜的不同距离处并收集反射波长(返回光)的任何单元,例如色散透镜单元、色散光学单元、色散透镜系统或色散透镜组件。cws测量系统还包括用于操作彩色共焦传感器的光源和光分析器(未示出)(例如,波长分析器)。该光源和该光分析器可以安装在该测量设备或机床1的静态部分上。静态部分相对于测量设备或机床的测量体积(即一体积,工件可以定位在该体积内或在该体积内机加工以用于测量)是静态的。另选地,该光源和该光分析器可以安装在该测量设备或机床1的移动部分上,如安装在其移动(例如,竖直或水平)轴中或者甚至安装在该铰接式探头50中。
[0101]
然而,光学探测装置12可以是任何其他类型的非接触式传感器,如干涉测量距离传感器、光学粗糙度传感器、光学轮廓仪或检查相机。非接触式传感器被配置成光学地连接至测量设备或机床(例如,cmm),例如,用于感测和/或操作目的。
[0102]
光学探测装置12可以例如以非接触的方式(例如,通过气隙界面、一个或多个透镜和/或反射镜的组合)或通过光纤15(如图1中所示)光学地连接至联接元件30a,以提供到光源和/或光分析器(例如,波长分析器)的光学连接,该光源和/或光分析器位于远处(例如,位于测量设备或机床的移动或静态部分中,尤其位于其铰接式探头上)。另选地或补充地,光学探测装置可以光学连接(非接触地或物理接触地)至位于非接触式感测单元10中的光电转换器,以便提供另选的或补充的有线或无线连接。
[0103]
另选地,光学探测装置12可以被光学地连接至位于非接触式感测单元10中的光源和/或光分析器。该光源和/或该光分析器可以被刚性地附接或联合至该光学探测装置12。此外,该光源和/或该光分析器可以被集成在该光学探测装置12的壳体内。测量数据可以通过有线或无线数据通信和/或通过(尤其由联接元件提供的)光学数据通信提供给测量设备
或机床1。
[0104]
如图1中所示,联接元件30a提供测量设备或机床1上的、有利地铰接式探头50上的互补联接元件30b的机械连接,以便允许非接触式感测单元10尤其在测量设备或机床1的测量体积中的定位和/或定向。取决于测量设备或机床1(尤其取决于铰接式探头),所述定向可以以连续的、可分度或分度的、自动的、辅助的和/或手动的模式来提供。
[0105]
如上所述,联接元件30a可以被互补配置成提供与测量设备或机床上的互补联接连接器30b的光学连接件32a,该探测装置有利地通过如图1所示的光纤40光学地连接至联接元件30a。根据应用,光纤40和/或光学连接件32a可以是单模、多模或多合一模式。优选地,该光纤和/或该光学连接件是多模式或多合一模式,以允许所发射的光和所反射的光两者都能同时传输。
[0106]
有利地,联接元件30a和互补联接元件30b被配置成允许非接触式感测单元10在测量设备或机床1上的自动切换(即,不需要操作者的干预,同时有利地提供定位和定向的可重复性)。具体地说,联接元件30a和互补联接元件30b可以有利地被配置成用于提供自定心和/或自对准联接,尤其是通过多个互补定位元件提供。
[0107]
优选地,联接元件30a和互补联接元件30b被配置成允许验证非接触式感测单元10操作性地联接到测量设备或机床1,尤其是借助于两部分式验证电路来进行。该电路的一部分位于联接元件30a中,而另一部分位于互补联接元件30b中。该两部分式电路可以被配置成有线地或无线地操作。另选地,验证电路可以位于互补联接元件30b中并且被配置成用于在联接时感测联接元件30a。
[0108]
优选地,联接元件30a和互补联接元件30b被配置成在被联接在一起时允许对该非接触式感测单元进行识别,尤其是通过两部分式识别电路进行。
[0109]
联接元件30a和互补联接元件30b可以被配置成向非接触式感测单元10的一个或多个有源部件(如图1中所示的数据存储电路13和/或电路11)提供电力和/或数据连接件31a(尤其是单线或多线电力和/或数据连接件)。
[0110]
电路11可以是以下各项中的任一项:识别电路,该识别电路提供该非接触式感测单元的数字识别;验证电路,该验证电路用于验证该非接触式感测单元可操作地联接到该测量设备或机床上;防篡改电路,该防篡改电路用于使得能够进行防篡改服务;数据编码电路,该数据编码电路用于提供安全和/或错误鲁棒编码;操作电路,该操作电路用于操作该非接触式感测单元;用于感测所述非接触式感测单元的操作状态的操作传感器电路;以及环境传感器电路。电路11还可以是:冷却/和/或加热元件(例如,珀尔帖元件)、用于清洁非接触式感测单元10的一部分、有利地光学探测装置12的一部分(具体为一个或多个光学物镜18a、18b)的清洁设备。电路11还可以是上述光电转换器,该光电转换器被光学地连接至该光学探测装置以用于进行尺寸或表面特性测量。
[0111]
非接触式感测单元10可以配备有基于流体的冷却和/或加热元件,尤其用于稳定非接触式感测单元10和/或光学探测装置12的至少一部分的温度。另选地或补充地,非接触式感测单元10可以配备有基于流体的清洁装置,以用于清洁非接触式感测单元10的一部分、有利地光学探测装置12的一部分、特别是一个或多个光学物镜18a、18b。另选地或补充地,非接触式感测单元10可以配备有空气轴承,该空气轴承用于允许非接触式感测单元10的移动部分移动/使该移动部分能够移动。在这种实施方式中,联接元件30a和互补联接元
件30b可以被配置成提供用于将流体(例如,空气、气体、液体)提供给非接触式感测单元10的流体连接件,以使得能够对非接触式感测单元10的一部分和/或部件(例如,致动器)进行空气支承、冷却、加热、致动和/或清洁。所提供的流体可以处于压力下,尤其用于致动空气轴承、清洁和致动目的。
[0112]
这些联接元件和互补联接元件允许在同一测量机器上自动地具有供使用的不同非接触式感测单元,不仅是具有不同测量范围或特征的非接触式感测单元,而且还有其他接触式和非接触式探测器。
[0113]
配备有互补联接元件30b(该互补联接元件具有上述连接件)的测量设备或机床1允许选择性地使用一大组不同的非接触式感测单元10(如上所述),尤其是在无源和有源非接触式感测单元之间(即,没有一个或多个电路或包括一个或多个电路的非接触式感测单元)选择地使用。
[0114]
根据本发明,铰接式探头50可以是任何支撑件,该支撑件在操作性地附接至测量设备或机床1上时提供所附接的非接触式感测单元10相对于该测量设备或机床1、尤其相对于移动臂或其元件在围绕一个或多个旋转轴线的预定位置和/或预定定向(尤其以可分度的、连续的、自动的和/或手动的模式)处的机械保持。铰接式探头50可以有利地安装在测量设备或机床1的移动臂(例如,水平或竖直臂)上或移动元件上。
[0115]
铰接式探头50可以是手动可致动的和/或机动化的铰接式探头,即配备有用于定向非接触式感测单元10的一个或多个马达。该铰接式探头的旋转轴线或多个旋转轴线可以是连续的、可分度的、或其组合。
[0116]
在图1所示的实施方式中,该铰接式探头是具有两个垂直旋转轴线的铰接式探头,该铰接式探头可固定至测量设备或机床1上、尤其是可固定至cmm的移动臂或元件(例如,如由美国专利no.10557702所描述的那样)。
[0117]
测量机1可以是用于(尺寸)计量的任何测量机,该测量机尤其被配置成用于以小于100μm(尤其是小于10μm)的分辨率提供和/或执行工件的尺寸和/或表面特性的测量。所测量的尺寸和/或表面特性可以是:线性尺寸(例如,边的长度、工件的两个点或边之间的距离、工件的外径、工件的腔的深度或内径)、角度、工件表面的粗糙度、工件层的厚度、工件表面上的点的坐标、和/或工件的轮廓。该列表不是穷尽性的。
[0118]
具体地说,测量机1可以是:(手动、半辅助、自动)cmm(例如,桥式cmm、铰接式cmm、车间cmm)、测量机器人、检查机或机器人。
[0119]
机床1可以是用于处理或加工尤其由金属或刚性材料制成的工件的任何机器。机床可被配置成以手动、半辅助或自动模式操作。具体地说,机床1可以是计算机化数控机床(cnc)。
[0120]
非接触式感测单元10与铰接式探头50相组合,通过允许沿着多个定向对非平坦工件进行测量而不要求待测量工件重新定位来提高测量通用性。另选地或补充地,测量设备或机床可设置有用于成角度地定位待测量的工件的旋转台,以便增加测量通用性。
[0121]
非接触式感应单元10可单独地或与一个或多个其他非接触式感应单元10和/或一个或多个其他探测单元组合地(即,同时地)操作地附接至测量设备或机床1,以便提供多重探测解决方案。其他探测单元可以是非接触式或接触式探测单元,以用于提高测量通用性和/或用于减少探测器更换延迟。
[0122]
必须指出的是,当今,这些探测装置12可以由第三方制造并作为独立单元提供以集成在非接触式感测单元中,例如,集成在非接触式感测单元的壳体20内部。然而,对于任何非接触式感测单元配置(即,具有不同的测量范围)以及沿着其任何可能的定向和移动来说,由于测量设备或机床1操作性地对整个非接触式感测单元10的重量进行定向和支撑(直接地或借助于铰接式探头50)的能力而给将这种光学探测装置12集成到非接触式感测单元10中提供了限制因素。
[0123]
此外,将这些光学探测装置集成到非接触式感测单元10中的另一个限制因素是由集成成本给出的。事实上,由于各种配置的光学探测装置的各种形状和尺寸,不能容易地实现一致且标准的探测器壳体。
[0124]
如图1所示,非接触式感测单元10因此包括套环24,该套环24围绕光学探测装置12的上部14a周向地夹紧该光学探测装置12。该上部14a与光学探测装置的、光学物镜18a所在的下部14b不同。如在本发明的发明内容中简要介绍和定义的,上部14a沿着朝向光源的光路19远离下部14b。
[0125]
套环24可以是被配置成用于至少部分地周向地夹紧该光学探测装置以提供物理支撑的任何元件或组件。夹紧可以通过各种结合方法之一或组合来实现,特别是:物理或机械紧固;和粘合剂结合(例如,胶合)。
[0126]
套环24可以被设计和/或布置成在一个或多个(空间上不同/分开的)夹紧区处夹紧光学探测装置12。
[0127]
套环24可以与各种光学探测装置一起使用,因为它可以容易地适配于任何具体类型的探测装置,尤其是适配于探测装置的形状和尺寸。
[0128]
有利地,套环24与联接元件30a刚性地联合。如图1所示,套环24机械地连接至非接触式感测单元10的紧固部分22上。该紧固部分被设计或布置成用于可能地借助于紧固元件24b机械地连接(例如,刚性地固定和/或接收)套环。在该实施方式中,紧固部分22由非接触式感测单元10的壳体20提供,该壳体20机械地连接至联接元件30a(与联接元件30a刚性地联合)。特别地,联接元件30a可被固定至壳体20(或是壳体20的一部分)。
[0129]
有利地,套环24可以被配置成非接触式感测单元10的紧固部分22与光学探测装置12之间的机械(轴向和/或径向定位和/或定向)可调节接口。
[0130]
具体地说,套环24可以有利地被配置成允许相对于(虚拟或物理)参考、尤其是非接触式感测单元10、测量设备或机床1和/或铰接式探头50的(虚拟或物理)参考来调节所夹持的光学探测装置12(具体地说,由光学探测装置12提供的焦距41、焦轴42和/或焦点43)的相对(轴向和/或径向)定位和/或定向。
[0131]
光学探测装置12的焦轴42在图1中被示出为与光学探测装置12的主体的纵向轴线19基本上同轴并且与如图2中所示的非接触式感测单元10的纵向轴线29基本上同轴。然而,光学探测装置12和/或非接触式感测单元10可被配置成提供相对于非接触式感测单元10的纵向轴线29和/或光学探测装置12的主体19的纵向轴线垂直或倾斜(例如,以0
°
直到180
°
的范围内的角度倾斜,通常以0
°
直到90
°
的范围内的角度倾斜)的焦轴42。
[0132]
光学探测装置12的精确(轴向和/或径向)定位和/或定向(对准)允许通过减小由非接触式感测单元的组装/制造引起的非接触式感测单元的光学操作不确定性来优化在测量设备或机床1上的测量以及校准过程。光学操作不确定性主要涉及焦距41的定位和/或焦
轴42的特定定向和/或径向位置的(确定和/或约束),尤其是焦点41相对于参考的空间定位的(确定)和/或焦点41相对于参考的给的空间定位的(约束)。
[0133]
该参考可以是或对应于以下各项中的一者或组合的一部分:非接触式感测单元的一部分(例如,紧固部分22)、非接触式感测单元10的联接元件30a、非接触式感测单元10的壳体20、在测量设备或机床1上的互补联接连接器30b、以及在测量设备或机床1上的铰接式探头。有利地,该参考可以对应于非接触式感测单元和/或测量设备或机床的坐标系的给定空间参考。该列表不是穷尽性的。
[0134]
为了减少这种光学操作不确定性,套环24可因此被配置成对光学探测装置12提供可调节夹紧,即允许对所夹紧的光学探测装置12相对于该套环24的相对轴向和/或径向位置和/或角位置进行调节的夹紧。套环24和光学探测装置12因此可以特别地通过可调节机械连接件连接在一起,例如:
[0135]
可调节球或枢转接头;和/或
[0136]
平移或滑动可调节连接件;和/或
[0137]
径向或横向可调节连接件。
[0138]
可调节连接件可以与套环的固定装置(例如,一个或多个:拧紧元件、丝杠、棘轮或带齿元件)配合提供。
[0139]
另选地或补充地,套环24可以包括用于调节其与非接触式感测单元10的紧固部分22的(轴向、径向和/或角位置)固定的可调节连接件。套环24和紧固部分22因此可以通过可调节连接件(例如:球或枢转可调节接头、径向或横向可调节连接件、和/或平移或滑动可调节连接件)机械地连接在一起。该可调节连接件可以包括套环24的固定装置24b,该固定装置24b可以与紧固部分22的互补元件(例如,一个或多个:拧紧元件、丝杠、棘轮或带齿元件)相配合。
[0140]
套环24可被配置成用于在给定(线性/轴向)位置和/或角度范围内、有利地分别在 /-5mm范围内、 /-5
°
范围内(优选地分别在 /-1mm范围内、 /-1
°
范围内)提供光学探测装置12相对于参考的相对(轴向和/或径向)位置和/或定向。
[0141]
有利地,与(通过套环24提供的或可通过套环24提供得到的)光学探测装置12的(轴向和/或径向)定位和/或定向相关(例如,依赖、推导出的或从其导出的、或描述)的至少一个光学操作参数可以存储在非接触式感测单元10的数据存储电路13中,尤其用于维护和/或售后服务。
[0142]
此外,数据存储电路13可以被配置成提供用于允许测量设备或机床1访问操作参数的数据通信,尤其用于支持测量和/或校准过程。
[0143]
数据通信可以是无线数据通信。因此,非接触式感测单元10可以包括可操作地连接至数据存储电路13的无线通信电路(例如,无线电应答器、无线电接收器和发射器、rfid)。无线通信电路可以通过联接元件30a和/或由非接触式感测单元10的电源供电。另选地,无线通信电路可以是无源电路,即,由(无线电)电磁信号触发的电路,例如,无源标签、无源rfid。
[0144]
另选地或补充地,数据通信可以是有线数据通信,例如,依赖于由联接元件30a提供的电通信31a。
[0145]
另选地或补充地,该数据通信可以是光学数据通信,例如,依赖于由联接元件30a
提供的光学通信32a。因此,非接触式感测单元10可以包括可操作地连接至数据存储电路13的光电转换器。
[0146]
数据存储电路13可以被配置成用于对数据(尤其是操作参数)进行编码和/或加密以用于提供可靠或安全(有线、无线和/或光学)数据通信。
[0147]
操作参数可以是或表示以下各项中的一项或多项的单个值或以下各项中的一项或多项的一系列值:
[0148]
该光学探测装置12(尤其是光学物镜18)的尤其与(该)虚拟或物理参考相关的轴向和/或径向位置和/或角位置;
[0149]
该光学探测装置12(尤其是光学物镜18)的尤其与(给定)轴向和/或径向参考位置和/或角度参考位置相关的轴向和/或径向位置和/或角度调节;
[0150]
该光学探测装置12(尤其是光学物镜18)的轴向和/或径向位置和/或角位置与(给定)轴向和/或径向参考位置和/或角参考位置的偏差;
[0151]
用于测量的非接触式感测单元的尤其与待测量的工件(的表面)相关的轴向和/或径向位置和/或角位置。
[0152]
操作参数可依赖于测量、估计和/或要求,尤其是光学探测装置12(尤其是一旦夹紧和/或安装在非接触式感测单元10(的壳体)中)的轴向和/或径向位置和/或角位置的测量、估计和/或要求。
[0153]
操作参数可以在工厂组装非接触式感测单元的过程中被存储在数据存储电路中。另选地或补充地,可在校准或维护过程期间存储操作参数。
[0154]
非接触式感测单元10的制造和/或维护因此可以包括将与该光学探测装置(尤其是一旦已经通过该套环对该光学探测装置的定位和/或定向进行了调节)的相对定位和/或定向有关的定位和/或角度参数存储在数据存储电路13中的步骤。
[0155]
另选地或补充地,该光学探测装置的定位和/或定向的过程可以包括将夹具24胶合和/或焊接到该光学探测装置12和/或该非接触式感测单元的紧固部分22的步骤。
[0156]
为了避免对光学探测装置相对于参考的经调节的定位和/或定向的无意识的或甚至有意识的修改(例如,篡改),一旦已经借助于套环24来操作对光学探测装置12的重新定位和/或重新定向,则可能希望阻止对光学探测装置12的进一步重新定位和/或重新定向。
[0157]
套环因此可以单独地或与非接触式感测单元的光学探测装置12和/或紧固部分22协作地被配置成用于避免和/或阻止光学探测装置的(物理的、机械的)重新定位和/或重新定向,例如借助于棘轮、有齿元件或粘性结合层。
[0158]
套环因此可以单独地或与非接触式感测单元的光学探测装置12和/或紧固部分22协作地被配置成响应于光学探测装置的重新定位和/或重新定向而对套环、光学探测装置和/或紧固部分22引起(人类-和/或机器-)可观察到的影响。可观察到的影响可以是相当于套环、光学探测装置和/或非接触式感测单元的一个或多个功能(例如,机械损坏或破坏)的减少的(物理或机械的,例如,彩色的)标记。
[0159]
另选地或补充地,该光学探测装置的定位和/或定向的过程可以包括将夹具24胶合和/或焊接到该非接触式感测单元的光学探测装置12和/或紧固部分22的步骤。
[0160]
非接触式感测单元10还可以包括密封环,优选o形环28,该密封环被安装在光学探测装置的一部分(尤其在光学物镜附近)与壳体20(的开口27)之间以便衰减振动、避免在碰
撞情况下光学探测装置12上的剧烈冲击、和/或提供符合诸如ip54或ip67之类的标准要求的防液体感测单元10。
[0161]
图2至4示出了非接触式感测单元10的示例性实施方式的细节。
[0162]
参考图2至图4,非接触式感测单元10包括基本上圆柱形的探测器壳体20(即,具有一个或多个圆形或弯曲的横截面),在该探测器壳体内部光学探测装置12被夹持到探测器壳体20,如随后详细描述的,以便确保光学探测装置12独立于光学探测装置12的定向而在静态和动态测量模式下在给定位置紧密地保持在壳体20内部。
[0163]
光学探测装置12具有圆柱形主体14,该圆柱形主体包括上部14a和下部14b。上部14a包括顶表面,该顶表面具有从其向上延伸的光纤连接器接收部分14c。因而,光纤40借助于与所述光纤连接器接收部分14c协作的光纤连接器15可操作地连接至光学探测装置12。在图2至图4的示例性实施方式中,探测装置圆柱形主体14的下部14b包括环形倒角16和围绕光学物镜18的平坦环形部分17。
[0164]
夹紧原理依赖于通过套环24在光学探测装置12的圆周处将光学探测装置12夹紧,套环24提供与非接触式感测单元(的一部分)的物理连接以进行测量,尤其是与其联接元件30a的刚性链接。
[0165]
套环可以采取基本上(即,大约到精确地)圆形、半圆形、弧形或弯曲的元件或其组件的形式,该元件或其组件被配置成用于周向地夹紧光学探测装置12的表面(尤其是外圆柱形表面),同时提供用于与非接触式感测单元10的紧固部分22协作的部分。套环24可以是单件或多个件的组件。
[0166]
有利地,套环被布置或成形为在径向定位在光学探测装置周围的多个夹紧区处夹紧光学探测装置12,以便提供应力消除区并且避免粘滑效应。套环24因此可以配备有用于接触光学探测装置12(的主体)的多个突起或接触元件。有利地,套环可以配备有3个突起或接触元件,以用于以点成形(点状)方式接触光学探测装置12,以便提供夹紧的光学探测装置的轴向和角度调节。突起或接触元件可以是:球形、杯形、点形、圆锥形、u形和/或v形元件。
[0167]
有利地,该套环可以被配置成用于径向地调节这些突起或接触元件的位置,以便(也)提供被夹紧的光学探测装置的径向位置调节,例如。通过(径向地)拧紧突起或接触元件。
[0168]
另选地,被夹紧的光学探测装置的径向位置调节可以由紧固元件24b提供,例如,通过拧紧位于套环的长圆形或扩大孔中的元件24b,这些元件24b允许套环相对于非接触式感测单元的紧固部分22进行径向定位。
[0169]
由于圆柱形探测器壳体20必须被设计成物理地符合套环的几何形状而不是光学装置的几何形状,周向夹紧提供了容易将各种配置的光学探测装置12集成到非接触式感测单元10中标准化,同时不仅降低了集成成本,而且降低了测量设备或机床1必须在任何可能的静态和动态定向上支撑以用于测量的总重量。
[0170]
如图2至图4所示,非接触式感测单元10的探测器壳体20包括第一圆柱形壳体部分20a,该第一圆柱形壳体部分用于将光学探测装置12操作性地集成在非接触式感测单元10中并且用于容纳光纤40(图1)。第一圆柱形壳体部分20a包括呈座部22形式的紧固部分,以用于(优选地刚性地)保持套环24。该座部可以采取环形平坦座部22的形式,具有力调整螺
钉25的夹紧环24形式的套环可以例如通过若干螺钉抵靠该环形平坦座部固定。套环可被实现为整体件(如图2至图4所示)或例如实现为组件,例如枢转连接在一起的两件式零件,以便方便该非接触式感测单元的组装。
[0171]
套环24被配置成用于基本上围绕圆柱形主体14的上部14a夹紧光学探测装置12,以便提供光学探测装置12相对于探测器壳体20的稳定定位以进行测量。
[0172]
所示出的实施方式的套环24分别提供了光学探测装置12相对于壳体20的紧固部分22、联接元件30a的位置的相对轴向调节。此外,同一套环24可以被配置成与该光学探测装置的主体的表面协作以不仅形成平移或滑动可调节连接,而且还形成枢转接头。这可以通过将该夹具布置成在该主体周围的多个点状夹紧区处夹紧光学探测装置来实现(例如,借助于该套环的内表面中的多个不同尖锐元件和/或突起)。
[0173]
如简要介绍的,该套环可以配备有夹紧力调整器(例如,具有力调整螺钉25的弹性套环的形式)。夹紧力调整器的使用不仅提供了光学探测装置12相对于非接触式感测单元10的轴向、径向和角位置的调节,而且还提供了由套环施加至光学探测装置12的夹紧力的微调和/或调整,以便在避免振动和/或温度引起的滑动的同时保证光学探测装置的物理完整性。
[0174]
该夹紧力调整器可以被配置成用于允许技术人员在制造、维护、修理和/或销售服务期间手动地(或半自动地)适配和/或调整该夹紧力。另选地或补充地,夹紧力调整器可以被配置成用于允许在光学探测装置12集成到非接触式感测单元中的过程中对夹紧力进行适配和/或调整。
[0175]
使用具有夹紧力调整器的套环因此降低了由温度变化和/或振动引起的滑动以及夹紧约束过度的风险。
[0176]
第一圆柱形壳体部分20a进一步包括在环形平坦座部22的相对端处的顶表面21。顶表面21包括具有预定轮廓的凹陷(未示出)以接收联接元件30a的下部,该下部例如通过螺钉固定到顶表面21。联接元件30a采取与光学和电连接器具有自定心接口的形式,如例如在us2011/0229091中所描述的。
[0177]
非接触式感测单元10的探测器壳体20包括第二圆柱形壳体部分20b,该第二圆柱形壳体部分被配置成与第一圆柱形壳体部分20b协作,尤其基本上容纳光学探测装置12。
[0178]
探测器壳体20(尤其是第二圆柱形壳体部分20b)可以包括用于在运输、存储和/或测量活动(inactivity)过程中保护光学物镜18免受冲击和/或污染物的保护元件或装置。该保护元件或装置可以是保护透镜或帽,尤其可在保护位置与休止位置之间(自动地或手动地)移动的保护透镜或帽。
[0179]
所示出的实施方式的第二圆柱形壳体部分20b包括第一圆柱形部29a和第二圆柱形部29b。第一圆筒形部29a的直径大于第二圆筒形部29b的直径,并且适于接收夹紧环24。第二圆柱形部29b的远端部分包括倾斜环形座部26a和界定开口27的平坦环形座部26b。
[0180]
在所示出的实施方式中,套环24至少部分地由钢制成,而壳体20至少部分地由铝制成,以用于限制非接触式感测单元的重量。
[0181]
优选地,夹具可以具有与光学探测装置(的主体)相同的热膨胀,以用于降低由温度变化引起的滑动的风险。
[0182]
光学探测装置12被定位在第二圆柱形部29b内部,使得其环形倒角16搁置在倾斜
环形座部26a上而其平坦环形部分17搁置在第二圆柱形部远端部分的平坦环形座部26b上。密封环(优选o型环28)可以围绕探测装置圆柱形主体14在专用区域(未示出)中安装在第二圆柱形部分29b内,以便衰减振动并且在碰撞情况下避免光学探测装置12上的剧烈冲击。
[0183]
如图1中示意性示出的光纤40被布置成使得一端借助于光纤连接器15被紧固到光学探测装置12,而相对端被插入联接元件30a中,以便经由扫描铰接式探头50的互补联接元件30b提供与测量设备或机床1的光学连接。
[0184]
第一壳体部分20a和第二壳体部分20b包括各自互补的螺纹部分23a、23b以牢固地组装这些部分。
[0185]
在另一个未示出的实施方式中,如上所述的非接触式感测单元的第一圆柱形壳体由两个部分制成:在两端开放的圆柱形部分以及牢固地安装成(例如通过若干螺钉)覆盖该圆柱形部分的一个开放端的盖。该构造可易于制造过程,因为在制造由一个零件制成的圆柱形壳体期间可能出现一些问题。这些问题主要涉及在车削过程中金属刨花的积累,这些金属刨花不容易逃离中空车削零件。
[0186]
另选地或对所示出的实施方式的补充,第二圆柱形壳体部分20b可以单独地或与第一圆柱形壳体部分20a协作地包括座部22或用于接收套环24的互补座部。
[0187]
有利地,探测器壳体20可以被配置成用于保护探测装置和/或光纤40(另选地或补充地,用于将光学探测装置连接至联接元件的一个或多个透镜和反射镜)免受液体和/或空气污染物(例如,通过密封环),更有利地免受冲击。
[0188]
示例性实施方式的数据存储电路13采取印刷电路的形式并且位于壳体20内。数据存储电路13对测量设备或机床1来说可通过由联接元件30a提供的电(数据)通信来访问。
[0189]
有利地,数据存储电路13不仅可以存储与光学探测装置相对于非接触式感测单元的轴向位置、径向位置和/或角位置相关(例如,取决于该轴向位置、径向位置和/或角位置)的一个或多个操作参数(例如,实际操作参数),而且还可以存储其他操作参数(例如,校准数据、标称操作参数)、非接触式感测单元的一个或多个标识符(尤其是光学探测装置12的一个或多个标识符)(例如,唯一的和/或装置标识符)、和/或附加的(制造)信息(例如,历史、制造日期)。
[0190]
尤其是,数据存储电路13可以存储以下各项之一或其组合:
[0191]
·
识别标签(例如,名称),该识别标签被分配给这些光学探测装置12和/或被分配给该非接触式感测单元10;和/或
[0192]
·
光学探测装置12和/或非接触式感测单元10的序列号;和/或
[0193]
·
分配给光学探测装置12和/或非接触式感测单元10的零件号(例如,目录和/或售后零件号);和/或
[0194]
·
光学探测装置12的制造商的标识。
[0195]
有利地,数据存储电路13可以(另选地或补充地)存储以下各项之一或组合:
[0196]
·
该光学探测装置12和/或该非接触式感测单元的生产日期;和/或
[0197]
·
该光学探测装置12和/或该非接触式感测单元的维护日期或维护历史;和/或
[0198]
·
标称和/或实际工作距离;和/或
[0199]
·
标称和/或实际测量范围;和/或
[0200]
·
标称和/或实际角度测量范围(或标称接受角);和/或
[0201]
·
沿着测量轴线(例如,焦轴42和/或纵向轴线29)的标称和/或实际测量分辨率;和/或
[0202]
·
焦点43的标称和/或实际光斑直径;和/或
[0203]
·
标称和/或实际校准数据,所述标称和/或实际校准数据用于映射和/或校正由所述非接触式感测单元提供的测量;和/或
[0204]
·
光学物镜18的(标称的和/或实际的)几何和/或光学像差;和/或
[0205]
·
非接触式感测单元的重量。
[0206]
实际操作参数可以是或表示与由套环保证的光学探测装置的轴向、径向和/或角位置相关(或取决于该轴向、径向和/或角位置)的操作参数。具体地说,一旦该光学探测装置通过该套环被定位(或重新定位),实际操作参数就可以根据尤其在工厂组装该非接触式感测单元过程中和/或维护该非接触式感测单元过程中执行的测量和/或估计来确定。
[0207]
优选地,所示出的实施方式的联接元件30a和互补联接元件30b还被配置成提供与非接触式感测单元10的电联接31a、31b,以便向可以集成在非接触式感测单元10中的一个或多个电路11和/或数据存储电路13提供电力。电路11可以是用于操作非接触式感测单元的操作电路、用于感测非接触式感测单元的操作状态(例如,加速度、工作累积时间、磨损、过热、冲击、异常、故障、改变、篡改等)的传感器、和/或环境传感器(例如,感测空气温度、湿度、空气质量、污染物、压力、灰尘浓度和/或噪声的传感器)。
[0208]
电路11所提供的数据可以借助于联接元件30a所提供的电气和/或光学数据通信而发送至测量设备或机床。另选地或补充地,由电路11提供的数据可以被无线地提供给测量设备或机床和/或存储在数据存储电路13中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。