1.本发明涉及一种用于在过程工程中操作测量点的方法,其中在测量点处使用至少一个激光雷达(光探测和测距)系统。
背景技术:
2.在过程工程中,经常采用测量设备,其例如用于压力和温度测量、电导率测量、流量测量、ph测量、料位测量等,并且其检测压力、温度、电导率、ph值、料位、流量等的对应过程变量。
3.在过程工程中,单点测量用于各种测量任务。例如,根据雷达原理,借助于料位测量设备来确定容器中的填充材料的料位。作为基于雷达的料位测量的替代,专利申请de102012108462a1和de102013114737a1公开以基于激光的方式执行料位的检测。然而,与所使用的技术无关,料位仅借助于单个反射路径来确定。在这种情况下不利的是,仅在填充材料的平坦表面的情况下,例如在水箱中,才能精确地做出关于位于容器中的填充材料的体积的准确描述。然而,如果表面例如是浮雕状的,例如在谷物筒仓中,则不能做出关于容器中的填充材料的体积的准确描述。
4.不能检测空间分布信息的以前使用的单点测量系统对于解决进一步的测量任务也是不利的。以下非穷举列表列出了一些应用及其缺点:
[0005]-在用于污泥水平测量的先前系统中,仅可在一个点处或用若干设备在若干点处监测沉降过程。
[0006]-在用于确定水生生物的大小的先前系统中,例如在鱼缸中,意图是将生物移除并且称重或单独测量。
[0007]-在用于确定气体含量的先前系统中,气泡的比例仅能经由密度来间接确定。此外,为此目的,必须知道介质。
技术实现要素:
[0008]
因此,本发明的目的在于克服单点测量系统的缺点并且在测量点处检测空间分布信息。
[0009]
该目的通过一种用于在过程技术中操作测量点的方法来实现,其中在测量点处使用至少一个激光雷达(光探测和测距)系统,该方法包括:
[0010]-借助于所述激光雷达系统从所述测量点的周围环境获取空间信息;
[0011]-从所述空间信息中提取对象信息;以及
[0012]-基于所述对象信息来重建和标识对象,并且将所述对象信息与所重建和所标识的对象相关联。
[0013]
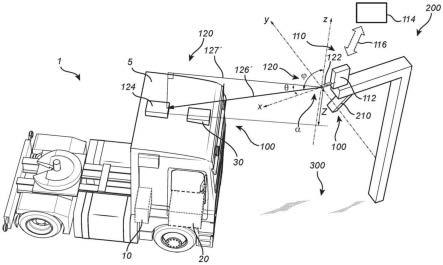
用于测绘陆地或海床表面或用于碰撞警告系统——例如在工厂自动化和自主驾驶系统中——的激光雷达(光检测和测距)系统是已知的。激光雷达系统根据激光测距的功能原理工作并且特别以栅格图案扫描其周围环境或照射区域。因此获得激光雷达系统的周
围环境的较大表面或空间区域的表面图像。所使用的激光的波长取决于应用的预期范围或激光雷达系统的环境。例如,对于作为周围介质的空气,使用具有在近红外范围内的波长的激光器。激光雷达优于诸如声纳和雷达的其它发射测量方法的优点在于,激光可以更定向地发射,这实现了成像的高空间分辨率。
[0014]
根据本发明,激光雷达系统扫描其周围环境并且获得空间信息。该空间信息特别通过作为在激光雷达系统发射激光束和接收激光束在周围环境的反射之间的时间的激光的传播时间产生,并且提供关于周围环境的对象距激光雷达系统的距离的信息。随后分析空间信息以出于检测对象信息的目的。对象信息是空间信息的子集,并且例如以描述比其余周围环境近许多倍的距离和/或相对于其余周围环境具有清晰轮廓的方式与其它空间信息不同。随后重建例如在形状和/或大小上与可以从对象信息收集的形状和/或大小相似的对象。在标识或重建对象之后,对象被指配给对象信息,使得例如可以检测和关联随时间的改变。例如,对象的几何形状和大小以及对象相对于激光雷达系统的相对空间位置可从对象信息获取。
[0015]
因此,根据本发明的方法使得可以检测测量点的周围环境。借助于由此获取或获得的数据,可以在过程技术领域中实现多种应用。
[0016]
根据本发明的方法的有利发展提供该方法还包括:
[0017]-以预定时间间隔重复上述方法步骤,并且记录每个所重建和所标识的对象的对象信息的时间曲线,特别是它们随时间在空间位置、数量、形状和/或大小上的改变;
[0018]-分析所述对象信息的时间曲线;以及
[0019]-基于对所述对象信息的时间曲线的分析来确定预测,和/或
[0020]-基于对所述对象信息的时间曲线的分析和/或基于所述预测来确定——尤其是执行——至少一个动作。
[0021]
将对象信息与对象相关联使得可以记录和跟踪对象随时间的改变。为此,以规则时间间隔最新获取对象信息。
[0022]
时间曲线或对象信息本身可以连接在激光雷达系统中实现的数据存储器中,或者在外部单元中,尤其是在连接到激光雷达系统的较高级系统——例如云、控制单元或控制室——中。动作的预测或建议被提供并呈现给用户,尤其是在外部单元上。
[0023]
根据本发明的方法的有利实施例提供ai算法用于重建和标识对象,用于分析对象信息的时间曲线,和/或用于确定动作或预测。
[0024]
ai算法借助于训练数据被预先学习。取决于激光雷达系统的具体应用,训练数据包括例如关于已知对象的对象信息以及与相应的预测和/或待采取的动作相关的对象的限定时间曲线,基于该对象信息,对象的标识成为可能。ai算法例如可以被设计为神经网络或者基于深度学习或类似适当方法。ai算法可以在激光雷达系统本身中实现和执行,或者如已经关于对象信息的记录所述,可以在外部存储和执行。
[0025]
由于与单点测量相比,激光雷达系统具有大得多的信息量,因此激光雷达系统可以开辟新应用。下面描述四个有利的示例性实施例:
[0026]
根据本发明的方法的有利实施例提供了用来自至少一个另外传感器系统特别是相机或雷达系统的信息来丰富对象信息。这特别有助于对象的初始识别和区分。另一传感器系统可以是激光雷达系统的一部分,或者被布置在外部并且与激光雷达系统通信。
[0027]
根据本发明的方法的第一变型提供测量点是在水产养殖中使用的测量点,其中对象是水生生物,并且其中对象信息涉及水生生物的大小和/或数量和/或大小或数量的平均值。这可能涉及例如其中繁殖有大量鱼的养鱼场。激光雷达系统以使得可以基本上检测到关于整个养殖池的空间信息的这样的方式放置和排列在水下。
[0028]
根据本发明的方法的第一变型的有利实施例提供预测包含关于水生生物的数量的增加或减少或关于水生生物的数量的平均值的信息。这样,不能以简单的方式确定鱼群的存量及其随时间的改变,而是可以基于平均大小另外观察鱼随时间的生长。
[0029]
此外可以提供,基于时间曲线,将动作建议给水产养殖运营商,例如以便增加或减少食物供应和/或食物量和/或增加或降低水温。
[0030]
根据本发明的方法的第二变型提供测量点是在精确农业中使用的测量点,其中对象是农产品,特别是农作物或动物,并且其中对象信息涉及农产品的大小和/或数量。激光雷达系统以使得可以基本上获取用于检测所有农产品的所有相关空间信息的这样的方式放置和排列。
[0031]
根据本发明的方法的第二变型的有利实施例提供预测包含关于农产品的数量的增加或减少或者关于农产品的数量的平均值的信息。不是可以以简单方式确定农产品的存量及其随时间的改变,而是可以另外基于平均大小随时间观察农产品的生长。
[0032]
此外可以提供,基于时间曲线向测量点的操作者建议动作,例如增加或减少水供应和/或增加或减少食物供应或肥料供应。
[0033]
根据本发明的方法的第三变型提供测量点位于具有至少一个设施组件——特别是容器、通道、开放池和/或管道的——过程设施中,并且其中对象是至少两种不同介质或具有不同光密度的至少两种介质的相界,并且其中对象信息是气泡或固体的含量。可以检测气泡或固体含量随时间的改变以及气泡或沉积物的局部改变。
[0034]
根据本发明的方法的第三变型的有利实施例提供例如当气泡增加发生或在介质中检测到更多沉淀物时,预测包含过程质量的改变程度。例如,可以提供使得过程设施的操作者可以获得信息,该信息是要执行用于维护或影响过程的动作的过程设施信息,例如清洁管道的信息。
[0035]
根据本发明的方法的第四变型方案提供测量点在输送系统中使用,并且其中对象涉及散装材料中的异物,特别是有缺陷的散装材料或外来对象。一种可能的应用是水果收获,其中由机器收获的水果在传送带上被运输,其中传送带的部分借助于激光雷达系统被捕获。这使得例如可以将石头或动物检测为外来对象。
[0036]
根据本发明的方法的第四变型的有利实施例提供确定并执行异物的距离,其中指示异物的位置。该动作可以完全自主地由相应的设施组件(例如,以夹持臂或舱口的形式的机器人系统)执行,或者例如以警报消息的形式呈现给用户。
[0037]
根据本发明的方法的第一变型或第二变型的有利实施例提供预定时间间隔为1小时至几天的数量级。在所描述的应用(水产养殖、农业应用)中,改变不是时间关键的,或者存在小的改变率,使得可以选择低测量频率。在这样的应用中,由于低测量速率导致的低能量需求,激光雷达系统可以利用有限能量源——例如电池或蓄电池——操作。
[0038]
根据本发明的方法的第三变型或第四变型的有利实施例提供预定时间间隔为0.1ms至10s的数量级,气泡的产生和移动或相界的位移特别地为高度动态的,使得必须选
择足够高的测量速率。现代激光雷达系统支持高达数khz的测量速率。
附图说明
[0039]
参考以下附图更详细地解释本发明。这些示出:
[0040]
图1:根据本发明的方法的第一示例性实施例;以及
[0041]
图2:根据本发明的方法的第二示例性实施例。
具体实施方式
[0042]
如今,激光雷达系统11、11’已经变得负担得起并且可小型化,使得它们也可以有利地用作用于过程工程的传感器技术。由于与单点测量相比,实质上具有更大信息内容,可以在过程工程中打开新应用。
[0043]
这些应用的非结论性列表示例如下:
[0044]
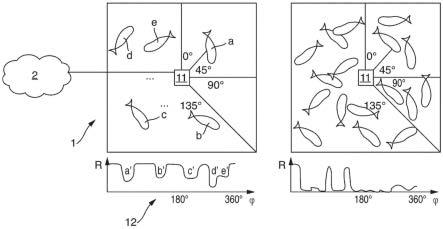
图1的左侧示出在水产养殖设施中的测量点1处的应用。具体地,它是养鱼场中的槽,其中多个鱼a、b、c、d、e位于水下,使得它们只能被操作者很难看到和计数。为此,探针形式的激光雷达系统11被居中地放置在槽中。
[0045]
激光雷达系统11被设计成使得其可以全面地检测其周围环境。为此目的,激光雷达系统发射激光束,该激光束在周围环境反射并且返回到激光雷达系统11。基于反射r,激光雷达系统11可以确定与周围环境的距离。激光雷达系统11可以例如借助于可移动反射镜机构以360
°
圆周运动将激光束移动到起始位置。记录圆周运动内的反射的强度,并将其称为空间信息12。图1的左下呈现这种空间信息12的示例。它示出在圆周路径中在各个角度处的反射r的强度。为了简化起见,这里假设激光束的高度保持相同,并且激光束在水平360
°
圆形路径中移动。然而,实际上,高度也是变化的,使得激光雷达系统的整个环境理想地被捕获为球形。
[0046]
激光雷达系统11经由有线或无线网络——例如lan或因特网——与外部单元3——例如云——通信并且被设计成经由建立的通信链路将获得的空间信息12发送到外部单元2。在外部单元中实现的逻辑控制器,例如ai算法,分析空间信息12并且提取对象信息a'、b'、c'、d'、e'。该对象信息a'、...、e'可以在图中以反射r的测量曲线中的倾斜的形式被看到。然后逻辑控制器例如基于经验值将鱼a、...、e识别或标识为对象。基于对象信息a'、...、e'的属性,逻辑控制器不仅可以做出关于鱼a、...、e的数量的描述,而且可以做出关于大小或重量的描述。或者,逻辑控制器在激光雷达系统11中实现,使得激光雷达系统11执行前述步骤。然而,为此目的,必须存在计算能力(cpu/gpu)、存储器空间和工作存储器形式的足够资源。
[0047]
对象信息a’、
……
、e’和关于对象a、
……
、e做出的描述被存储在外部单元2或激光雷达系统11的存储器单元中。测量以规则时间间隔——例如在几小时到几天的范围内——重复。由逻辑控制器特别是关于改变来记录和分析对象信息的时间曲线。例如,对鱼群是否已经改变或者鱼的(平均)大小和/或重量是否已经改变进行分析。此外,逻辑控制器可以计算鱼群的增加或减少的预测。此外,逻辑控制器可以在预测或改变不是如所期望的那样表现的情况下推荐执行动作。操作者然后可以执行适当测量,例如水温的相关改变或营养物供应频率的变化。
[0048]
在大量鱼位于盆中的情况下(见图1的右侧),例如当两条或更多条鱼彼此靠近时,空间信息12的解释可能更加困难。为了改进分析,空间信息可以用来自另一传感器系统的数据来丰富。例如,可以使用集成的或外部的相机,其捕获激光雷达系统11的周围环境的照片或视频。
[0049]
在修改的示例性实施例中,激光雷达系统用于所谓的精密农业(德语:)应用中。代替检测水生生物作为对象的,检测农产品(例如水果或动物)并跟踪它们的存量或大小随时间的改变。根据随时间的改变,逻辑控制器可以建议减少或增加水和营养物的供应,以便实现农产品的最佳开发。
[0050]
图2示出激光雷达系统11’将被安装在或附接到过程设施的测量点1’的设施组件13,在这种情况下为管道。流体测量介质流过管道13。可选地,具有不同光密度的几种不同测量介质位于设施组件——例如罐——中。流动测量介质中的相界f基于通过反射r所获得的空间信息被标识为对象。例如是气泡(在流动测量介质的情况下)的这些相界f或悬浮固体(在不同光密度的测量介质中),或者由于不同聚集状态而产生(例如,在冰水作为流体测量介质的情况下)可以由在外部单元2中实现的逻辑控制器在数量、形状、大小和/或局部移动方面检测,并且随着时间的推移而观察。为此目的,必须将测量频率选择得非常高。
[0051]
逻辑控制器还可以执行其他功能。例如,可以从测量体积中的冰与水的比率推断潜能。例如,还可以向过程设施的操作者提供信息,即当例如气泡越来越多地发生时,将执行用于维持或影响处理的动作,例如清洁设施部件12。
[0052]
或者,设施组件12可以是传送带,散装材料(例如,收获的作物)在该传送带上传送。通过评估空间或对象信息,可以标识异常和外来对象。
[0053]
附图标记列表
[0054]
1,1
’ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
测量点
[0055]
11,11
’ꢀꢀꢀꢀꢀꢀꢀ
测量点
[0056]
12
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
空间信息
[0057]
13
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
设施组件、管道
[0058]2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
外部单元
[0059]
a,b,c,d,e,f
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
对象
[0060]
a’,b’,c’,d’,f
’ꢀ
对象信息
[0061]rꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
反射
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。