1.本实用新型涉及铝支架加工技术领域,具体是涉及一种基于激光原理的铝支架定长自动切割装置。
背景技术:
2.铝支架在我们的工作和生活用处广泛,当一批铝支架在成型产出后,其长度一般在3米到6米之间,所以在投入使用前需要对其进行切割加工处理,传统的切割方式多以锯齿切割机的方式进行人工切割,如果需要定长的话,事先用记号笔画好间隔标记再进行切割,首先通过用锯齿作为刀片,在切割的过程中会产生非常多的金属粉尘,同时噪音也非常大,对人的身心健康都会产生不利的影响,并且人工操作容易产生误差,导致切割面不平齐以及切割后的铝支架长度不一的问题出现,所以需要提供一种基于激光原理的铝支架定长自动切割装置来解决上述的问题。
技术实现要素:
3.基于此,有必要针对现有技术问题,提供一种基于激光原理的铝支架定长自动切割装置。
4.为解决现有技术问题,本实用新型采用的技术方案为:一种基于激光原理的铝支架定长自动切割装置,包括呈水平状态设置的铝支架,还包括:
5.上料传送带,呈水平状态固定设置;
6.出料传送带,呈水平状态设置于上料传送带的末端,所述出料传送带用于承接由上料传送带送出的铝支架;
7.切割组件,位于上料传送带和出料传送带之间,所述切割组件包括一个激光切割头和用于带动激光切割头横移的平移机构;以及,
8.计长组件,位于上料传送带和出料传送带之间,所述计长组件包括:
9.第一水平滑轨,固定设置于出料传送带的一侧;
10.第一感应器,活动设置于第一水平滑轨上,用于检测铝支架是否经过;
11.第二感应器,活动设置于第一水平滑轨上,所述第二感应器位于第一感应器和上料传送带之间,所述激光切割头与第二感应器的位置相对应;
12.激光测距仪,固定设置于第二感应器的外侧,用于实时测量第一感应器与第二感应器之间的距离。
13.进一步的,所述上料传送带有两个,二者呈上下间隔设置,两个上料传送带之间通过一个弹性下压机构相连,弹性下压机构包括一个与上料传送带平行的条形挡板和若干个呈竖直状态的强力弹簧,所述条形挡板通过若干个竖直侧板与下方的上料传送带固连,并且所述位于下方的上料传送带两侧的侧壁上成型有若干个轴向与自身长度方向垂直的导滑柱,每个所述导滑柱均穿过对应的竖直侧板并向外延伸,每个所述竖直侧板的内壁上均开设有配合导滑柱上下滑动的条形滑槽,所述强力弹簧固定设置于条形挡板和位于上方的
上料传送带之间,并且所述强力弹簧的上下端分别与条形挡板的下端和位于上方的上料传送带的上端相抵触。
14.进一步的,所述第一水平滑轨的一端与上料传送带的末端侧壁固连,另一端与出料传送带的侧壁固连,所述出料传送带的另一侧固定设置有一个第二水平滑轨,第二水平滑轨的一端与上料传送带的末端侧壁固连,所述平移机构与第二水平滑轨滑动相连。
15.进一步的,所述平移机构的底部固定连接有一个竖直支撑板,竖直支撑板的下端一侧固连有一个滑块,滑块与第二水平滑轨滑动相连。
16.进一步的,所述第一感应器和第二感应器分别通过一个滑座与第一水平滑轨相连,每个滑座的顶部均设置有用于供第一感应器或者第二感应器连接的传感器支架,所述激光测距仪固定设置于第二感应器的滑座侧壁上,第一感应器的滑座侧壁上设置有一个配合激光测距仪的检测挡板。
17.进一步的,所述竖直支撑板上安装有一个与第二感应器对应的定位栓,所述第二感应器为激光笔,所述激光笔的照射线束与激光切割头的激光线束垂直相交。
18.进一步的,所述第一感应器为接近开关。
19.进一步的,所述平移机构为滑台气缸,激光切割头呈竖直状态固定设置于滑台气缸的输出端上。
20.本实用新型与现有技术相比具有的有益效果是:相比传统的锯齿切割机,本装置的激光切割头可以减少噪音和金属粉尘对人体的伤害,同时本装置的计长组件通过光学捕捉对铝支架进行长度测量,增加了长度测量的精确率,保证每个切割下来的铝支架都是等长的,同时计长组件也是可调节设计,满足了对不同长度的需求。
附图说明
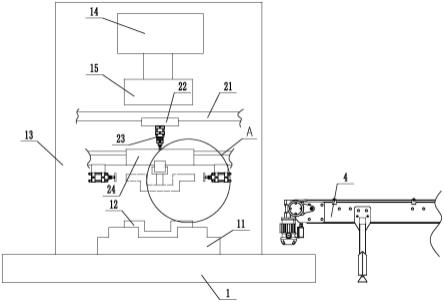
21.图1是实施例的立体结构示意图;
22.图2是实施例的上料传送带的俯视图;
23.图3是图2沿a-a线的剖视图;
24.图4是图2沿b-b线的剖视图;
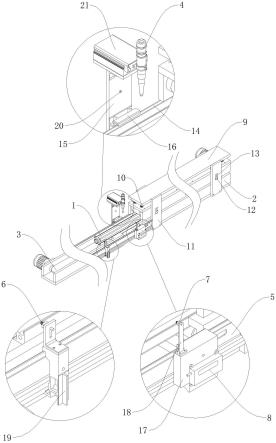
25.图5是实施例的第一水平滑轨和第二水平滑轨的俯视图;
26.图6是图5沿c-c线的剖视图;
27.图7是图5沿d-d线的剖视图;
28.图中标号为:1-铝支架;2-上料传送带;3-出料传送带;4-激光切割头;5-第一水平滑轨;6-第一感应器;7-第二感应器;8-激光测距仪;9-条形挡板;10-强力弹簧;11-竖直侧板;12-导滑柱;13-条形滑槽;14-第二水平滑轨;15-竖直支撑板;16-滑块;17-滑座;18-传感器支架;19-检测挡板;20-定位栓;21-滑台气缸。
具体实施方式
29.为能进一步了解本实用新型的特征、技术手段以及所达到的具体目的、功能,下面结合附图与具体实施方式对本实用新型作进一步详细描述。
30.参考图1至图7所示的一种基于激光原理的铝支架定长自动切割装置,包括呈水平状态设置的铝支架,还包括:
31.上料传送带2,呈水平状态固定设置;
32.出料传送带3,呈水平状态设置于上料传送带2的末端,所述出料传送带3用于承接由上料传送带2送出的铝支架1;
33.切割组件,位于上料传送带2和出料传送带3之间,所述切割组件包括一个激光切割头4和用于带动激光切割头4横移的平移机构;以及,
34.计长组件,位于上料传送带2和出料传送带3之间,所述计长组件包括:
35.第一水平滑轨5,固定设置于出料传送带3的一侧;
36.第一感应器6,活动设置于第一水平滑轨5上,用于检测铝支架1是否经过;
37.第二感应器7,活动设置于第一水平滑轨5上,所述第二感应器7位于第一感应器6和上料传送带2之间,所述激光切割头4与第二感应器7的位置相对应;
38.激光测距仪8,固定设置于第二感应器7的外侧,用于实时测量第一感应器6与第二感应器7之间的距离。
39.首先第一感应器6与上料传送带2的驱动件通过控制器电连接,所述控制器在图上并未画出,通过第一水平滑轨5来调节激光切割头4与第二感应器7的位置,使激光切割头4的激光射线与第二感应器7的照射射线垂直相交,其次根据所需长度需求调节第一感应器6与第二感应器7之间的距离,二者之间的距离即为激光测距仪8显示的距离,当铝支架1通过上料传送带2传送至出料传送带3上时,第一感应器6会实时检测铝支架1是否通过,当铝支架1通过时,第一感应器6会传输电信号给控制器,从而使控制器停止驱动件对上料传送带2的驱动,最后启动切割组件,对铝支架1进行激光切割,此时铝支架1被切割的长度即为激光测距仪8显示的长度,所以每当铝型材经过第一感应器6时都会停止运动并被切割组件激光切割,从而重复上述的步骤即可实现对铝支架1定长的自动切割。
40.所述上料传送带2有两个,二者呈上下间隔设置,两个上料传送带2之间通过一个弹性下压机构相连,弹性下压机构包括一个与上料传送带2平行的条形挡板9和若干个呈竖直状态的强力弹簧10,所述条形挡板9通过若干个竖直侧板11与下方的上料传送带2固连,并且所述位于下方的上料传送带2两侧的侧壁上成型有若干个轴向与自身长度方向垂直的导滑柱12,每个所述导滑柱12均穿过对应的竖直侧板11并向外延伸,每个所述竖直侧板11的内壁上均开设有配合导滑柱12上下滑动的条形滑槽13,所述强力弹簧10固定设置于条形挡板9和位于上方的上料传送带2之间,并且所述强力弹簧10的上下端分别与条形挡板9的下端和位于上方的上料传送带2的上端相抵触。
41.当铝型材放入到上料传送带2后,铝型材会被弹性下压机构向下压紧并通过两个传送带向前移送,当通过第一感应器6时由于控制器会停止对上料传送带2的驱动,所以弹性下压机构产生的向下弹力可以对铝支架1进行稳定,方便切割组件对其进行激光切割,保证铝支架1切割面的平滑,同时确保了铝支架1每次经过第一感应器6时,可以稳定的停止运动。
42.所述第一水平滑轨5的一端与上料传送带2的末端侧壁固连,另一端与出料传送带3的侧壁固连,所述出料传送带3的另一侧固定设置有一个第二水平滑轨14,第二水平滑轨14的一端与上料传送带2的末端侧壁固连,所述平移机构与第二水平滑轨14滑动相连。
43.第一水平滑轨5用于调节第一传感器与第二传感器之间的距离,第二水平滑轨14用于调节激光切割头4的水平位置。
44.所述平移机构的底部固定连接有一个竖直支撑板15,竖直支撑板15的下端一侧固连有一个滑块16,滑块16与第二水平滑轨14滑动相连。
45.通过滑块16与第二水平滑轨14的配合,可以实现激光切割头4的水平移动,用于事先调节激光切割头4与第二感应器7的位置,使激光切割头4的激光射线与第二感应器7的照射射线垂直相交。
46.所述第一感应器6和第二感应器7分别通过一个滑座17与第一水平滑轨5相连,每个滑座17的顶部均设置有用于供第一感应器6或者第二感应器7连接的传感器支架18,所述激光测距仪8固定设置于第二感应器7的滑座17侧壁上,第一感应器6的滑座17侧壁上设置有一个配合激光测距仪8的检测挡板19。
47.第一感应器6与第二感应器7的照应射线的方向均朝向铝支架1设置,第一感应器6的照射射线需要位于检测挡板19的检测面共平面设置,当铝支架1被第一感应器6检测到并停止运动后,铝支架1在第一感应器6的位置到第二感应器7的位置距离即为激光测距仪8所显示的距离。
48.所述竖直支撑板15上安装有一个与第二感应器7对应的定位栓20,所述第二感应器7为激光笔,所述激光笔的照射线束与激光切割头4的激光线束垂直相交。
49.激光笔的照射线束与定位栓20的中心处于同一水平线上,并且激光笔在传感支架上的位置应与激光测距仪8的照射端处于同一垂直线上,从而通过水平滑轨调节激光笔与定位栓20的位置即可实现激光切割头4与激光测距仪8的照射端处于同一垂直线上,进而保证当铝支架1停止时,激光测距仪8所显示的距离为铝支架1的端头到激光切割头4的水平距离。
50.所述第一感应器6为接近开关。
51.当铝支架1经过接近开关时,接近开关立即启动并停止驱动件对上料传送带2的驱动,从而确保当铝支架1经过第一感应器6停止运动时,第一感应器6的照射光线正好照射在铝支架1的端头处。
52.所述平移机构为滑台气缸21,激光切割头4呈竖直状态固定设置于滑台气缸21的输出端上。
53.当切割组件需要进行切割的时候,启动滑台气缸21,即可实现激光切割头4的横向切割。
54.以上实施例仅表达了本实用新型的一种或几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。