1.本实用新型涉及一种叉车,尤其是涉及一种基于视觉智能导航的插腿式无人电动叉车。
背景技术:
2.叉车是工业搬运车辆,是指对成件托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆,广泛应用于车站、缸口、机场、工厂、仓库等各国民经济部门,是机械化装卸、堆垛和短距离运输的高效设备。随着社会的发展,叉车的使用环境也日益复杂,为了适应叉车功能的多样性需求,对叉车设计和制造也相应产生了更高的要求。
3.现有的叉车一般是人工驾驶或半自动驾驶,包括叉车本体,叉车本体上设有驾驶舱和升降支架,货叉设置在升降支架上,体积庞大,同时由于对驾驶舱的视野有要求,即需要保证升降支架不遮挡驾驶人员的视野,因此限制了升降支架的高度,进而使得货叉的升降高度也受到了限制,适用范围大大受限,同时货叉升降基本上是通过导轨和升降驱动机构实现,将货叉竖直滑动安装在升降门架上,再通过升降驱动机构,例如升降气缸,带动货叉升降,这种方式存在以下缺点:
4.驱动机构并非在货叉正下方,货叉下方没有支撑机构,若货叉长度较长,会导致货叉的承载能力较小,当货叉承载重物时容易产生变形,甚至损坏,容易引发安全事故。
技术实现要素:
5.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种基于视觉智能导航的插腿式无人电动叉车,自动化程度高,承载能力强,定位精度高。
6.本实用新型的目的可以通过以下技术方案来实现:
7.一种基于视觉智能导航的插腿式无人电动叉车,包括底座、立式支架、升降机构、前滑板、叉铲、监控模块、控制模块、叉剪机构和若干个差速转向轮,所述的立式支架设于底座上,所述的前滑板竖直滑动设置在立式支架上,并与升降机构传动连接,所述的叉剪机构设于叉铲和底座之间,且与前滑板传动连接,所述的监控模块设于立式支架上,所述的若干个差速转向轮设于底座底部,所述的控制模块与监控模块以及差速转向轮电性连接。
8.进一步地,所述的控制模块包括单片机、运控卡、库仑计、驱动板、电池、工控电脑和步进电机驱动器,所述的单片机、运控卡、步进电机驱动器和差速转向轮依次电性连接,所述的电池与库仑计、单片机和工控电脑连接,所述的驱动板与单片机电性连接。
9.进一步地,所述的监控模块包括接近开关,所述的接近开关设于前滑板上,并与单片机电性连接。
10.进一步地,所述的监控模块包括陀螺仪和角度传感器,所述的陀螺仪与工控电脑连接,所述的角度传感器、单片机和工控电脑依次连接,所述的陀螺仪设于立式支架顶部,所述的角度传感器与差速转向轮连接。
11.进一步地,所述的监控模块包括第一摄像头和第二摄像头,所述的第一摄像头和
第二摄像头与工控电脑连接,所述的第一摄像头设于立式支架顶部,所述的第二摄像头靠近底座。
12.进一步地,所述的升降机构包括推缸、链轮、链条和链轮轴,所述的推缸和驱动板电性连接,所述的立式支架上水平设有横梁,所述的推缸的输出轴竖直设置,所述的链轮轴与输出轴端部固定,所述的链轮设于链轮轴上,所述的链条一端固定在横梁上,另一端绕过链轮,并与前滑板固定连接。
13.进一步地,所述的横梁上设有固定环,所述的固定环套在推缸上。
14.进一步地,所述的前滑板上设有限位轴承,所述的立式支架上竖直设有与限位轴承匹配的滑轨,所述的限位轴承滑设于滑轨上。
15.进一步地,所述的底座包括主体底座和前腿,所述的立式支架设于主体底座上,所述的前腿位于叉铲的正下方,所述的叉剪机构设于前腿上。
16.进一步地,所述的立式支架上设有电控安装板,所述的控制模块设于电控安装板上。
17.与现有技术相比,本实用新型具有以如下有益效果:
18.(1)本实用新型监控模块用于获取环境信息以及叉车参数信息,控制模块接收控制指令,并根据环境信息以及叉车参数信息,控制差速转向轮的各个步进电机转动的速度和加速度,实现单个差速转向轮的转向和前进,若干个差速转向轮协同运行,共同实现无人叉车的转向、调速和定位,无人叉车完成定位后,控制模块通过升降机构控制前滑板上升或下降,进而带动叉铲上升或下降,完成装货和卸货,升降机构通过叉剪机构带动叉铲升降,使得叉铲的升降过程平稳,且承载能力强,本实用新型提出的无人叉车能够自动完成导航、定位以及货物装卸,自动化程度高;
19.(2)本实用新型工控电脑接收控制指令,并发送给单片机,单片机通过运控卡和步进电机驱动器单独控制各个差速转向轮运动和转向,实现无人叉车的前进和转向,单片机通过驱动板驱动升降机构,进一步带动叉铲升降,完成货物装卸,自动化程度高;
20.(3)本实用新型库仑计与电池连接,库仑计所述的可实时监测电池的电压、电流、容量、功率和温度,方便对电池进行管理;
21.(4)本实用新型接近开关设于前滑板上,并与单片机电性连接,可在叉铲插入托盘后感应托盘的位置是否到位,当接近开关感应到托盘时,所述的无人叉车停止向前运动,实现精准定位,保证托盘装卸过程顺利进行;
22.(5)本实用新型陀螺仪设于立式支架顶部,并与工控电脑连接,陀螺仪可检测无人叉车的水平方位角度、角速率及前进轴向体加速度,用于无人叉车行驶中方向和角度的判断,实现无人叉车转向的精确控制;
23.(6)本实用新型每个差速转向轮上设有一个角度传感器,用于检测差速转向轮的转向角度,保证各个差速转向轮协同运行,共同实现无人叉车的自主导航;
24.(7)本实用新型第一摄像头和第二摄像头与工控电脑连接,所述的第一摄像头设于立式支架顶部,第二摄像头靠近底座;通过工控电脑调用第一摄像头和第二摄像头,获取无人叉车周围的行驶环境以及无人叉车正前方的托盘图像信息,便于无人叉车的视觉导航和定位,防止发生碰撞;
25.(8)本实用新型升降机构中的链轮相当于一个费力动滑轮,达到省距离的效果,将
叉铲升至特定高度所需的推缸输出轴的要求高度降低,升降过程更加快速和平稳;
26.(9)本实用新型横梁上设有固定环,固定环套在推缸上,保证推缸的位置固定,安全性高;
27.(10)本实用新型前滑板上设有限位轴承,立式支架上竖直设有与限位轴承匹配的滑轨,限位轴承滑设于滑轨上,前滑板能沿着滑轨平稳滑动,保证叉铲沿竖直方向平稳升降;
28.(11)本实用新型底座包括主体底座和前腿,立式支架设于主体底座上,前腿位于叉铲的正下方,叉剪机构设于前腿上,叉铲处于最低位置时,所述的前腿对叉铲具有支撑作用,同时叉剪机构容纳与前腿和叉铲之间,结构紧凑,同时起到保护作用;
29.(12)本实用新型立式支架上设有电控安装板,控制模块设于电控安装板上,便于集中管理。
附图说明
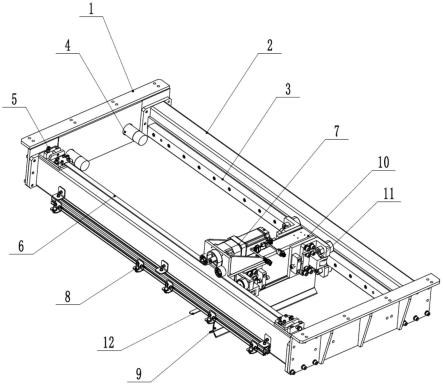
30.图1为叉车正面结构示意图;
31.图2为叉车背面结构示意图;
32.图3为叉车截面图;
33.图4为叉车侧视图;
34.图5叉车顶部结构示意图;
35.图6为叉车底侧结构示意;
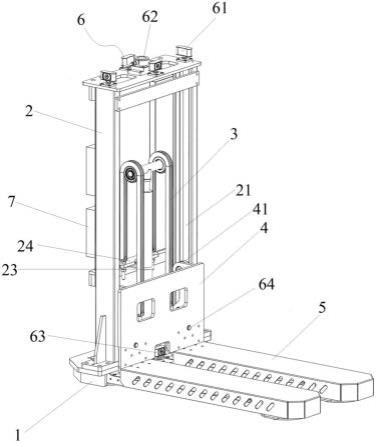
36.图7为升降机构的结构示意;
37.图8为前滑板的结构示意;
38.图9为底座的结构示意;
39.图10为前滑板、安装块以及叉剪机构的装配示意图;
40.图中标号说明:
41.1.底座,2.立式支架,3.升降机构,4.前滑板,5.叉铲,6.监控模块,7.控制模块,8.叉剪机构,9.安装块,10.差速转向轮,11.主体底座,12.前腿,21.滑轨,22.电控安装板,23.固定环,24.横梁,31.推缸,32.链轮,33.链条,34.链轮轴,41.限位轴承,61.第一摄像头,62.陀螺仪,63.第二摄像头,64.接近开关,65.角度传感器,71.单片机,72.运控卡,73.库仑计,74.驱动板,75.电池,76.工控电脑,77.步进电机驱动器。
具体实施方式
42.下面结合附图和具体实施例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
43.实施例1
44.一种基于视觉智能导航的插腿式无人电动叉车,如图1、图4、图6和图10,包括底座1、立式支架2、升降机构3、前滑板4、叉铲5、监控模块6、控制模块7、叉剪机构8、安装块9和行走模块,所述的行走模块包括4个差速转向轮10,底座1包括主体底座11以及与主体底座11连接的两个前腿12,两个前腿12左右对称设置,立式支架2设于主体底座11上,前滑板4竖直
滑动设置在立式支架2上,并与升降机构3传动连接,监控模块6设于立式支架2上,控制模块7与监控模块6以及4个差速转向轮10电性连接,叉铲5的数量为两个,两个叉铲5分别位于两个前腿12的正上方,如图9,叉剪机构8设于叉铲5和前腿12之间,且通过安装块9与前滑板4传动连接,其中两个差速转向轮10对称设于主体底座11底部,另外两个差速转向轮10分别设于两个前腿12底部。
45.如图2,立式支架2上设有电控安装板22,控制模块7设于电控安装板22上。控制模块7包括单片机71、运控卡72、库仑计73、驱动板74、电池75、工控电脑76和步进电机驱动器77,单片机71、运控卡72、步进电机驱动器77和差速转向轮10的步进电机依次电性连接,电池75与库仑计73、单片机71和工控电脑76连接,推缸31、驱动板74和单片机71依次电性连接。
46.单片机71采用arduino板,型号为arduino mega2560,arduino mega2560是采用usb接口的核心电路板,具有54路数字输入输出,适合需要大量io接口的设计,同时具有54路数字输入/输出口(其中15路可作为pwm输出)、15路模拟输入、4路uart接口、一个16mhz晶体振荡器、一个usb口、一个电源插座、一个icsp header以及一个复位按钮。
47.差速转向轮10基于差速转向原理,采用步进电机驱动方式,为现有技术。每个差速转向轮10包括两个步进电机,设有8个步进电机驱动器77,步进电机驱动器77是一种将电脉冲转化为角位移的执行机构,当步进电机驱动器77接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步距角),步进电机的旋转是以固定的角度一步一步运行的,可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的,同时可以通过控制脉冲频率来控制步进电机转动的速度和加速度,从而达到调速和定位的目的;
48.运控卡72采用wj-s8控制器,wj-s8控制器是一款高性价比八轴联动控制器芯片,它实现了传统运动控制卡的多轴运动控制功能,为开发者提供简便的调用接口,用户只需要通过usb线或usb转串口线即可控制八个步进电机动作,通过wj-s8控制器的协议,用tx、rx(串口线)将运控卡72与单片机71进行通讯连接;
49.驱动板74采用pwm直流电机驱动模块,可以实现直流电机正反转、调速功能,从而实现推缸31的上升和下降功能。工控电脑76自带wifi,工控电脑76通过wifi接收来自管理电脑的指令,该指令包括路径文件、工单文件、停止时刻、启动时刻,工控电脑76再给单片机71发送指令,单片机71给驱动板74发送指令,驱动板74驱动推缸31,链条33带动叉铲5上升或下降;
50.库仑计73通过rs485与工控电脑76连接,电池75为锂电池,电池75为无人叉车供电,库仑计73可实时监测电池75的电压、电流、容量、功率和温度,方便对电池75进行管理;
51.工控电脑76实时显示路径、电池电量和工作时间,工控电脑76是数据处理中心。
52.监控模块6包括第一摄像头61、陀螺仪62、第二摄像头63和角度传感器65;
53.如图5,第一摄像头61和第二摄像头63与工控电脑76连接,第一摄像头61和陀螺仪62设于立式支架2顶部,第一摄像头61的数量为4个,4个第一摄像头61分别朝向无人叉车的前后左右方,第二摄像头63靠近底座1,位于两个前腿12之间,并朝向无人叉车的正前方,通过工控电脑76调用第一摄像头61和第二摄像头63,获取无人叉车周围的行驶环境,定义目标物、墙体、道路、障碍物和行人等,便于无人叉车的视觉导航。
54.陀螺仪62与工控电脑76连接,可检测无人叉车的水平方位角度、角速率及前进轴
向体加速度,用于无人叉车行驶中方向和角度的判断。
55.每个差速转向轮10上设有一个角度传感器65,角度传感器65为磁敏角度传感器,用于检测差速转向轮10的转向角度,角度传感器65与工控电脑76连接。
56.实施例2
57.本实施例中,如图3和图7,升降机构3包括推缸31、链轮32、链条33和链轮轴34,立式支架2上水平设有横梁24,推缸31的输出轴竖直设置,链轮轴34与输出轴端部固定,链轮32设于链轮轴34上,链条33一端固定在横梁24上,另一端绕过链轮32,并与前滑板4固定连接,如图8,前滑板4上设有限位轴承41,立式支架2上竖直设有与限位轴承41匹配的滑轨21,限位轴承41滑设于滑轨21上,升降机构3可带动前滑板4沿着滑轨21上下滑动。横梁24上设有固定环23,固定环23套在推缸31上,使得推缸31的位置保持稳定,链轮32相当于一个费力动滑轮,达到省距离的效果,将叉铲5升至特定高度所需的推缸31的输出轴高度降低,升降过程更加快速和平稳。其他与实施例1相同。
58.实施例3
59.本实施例中,如图1和图2,监控模块包括接近开关64,接近开关64的数量为两个,两个接近开关64左右对称设置在前滑板4上,并与单片机71电性连接,用来叉铲5插入托盘后感应托盘的位置是否到位,当接近开关感应到托盘后,叉车就停止向前运动。
60.实施例1、实施例2和实施例3提出了一种基于视觉智能导航的插腿式无人电动叉车,行走模块基于差速转向原理,通过监控模块6采集环境信息,控制模块7根据环境信息,控制行走模块实现无人叉车的行走和定位,自动化程度高,定位精度高,通过升降机构3带动叉剪机构8,进一步带动叉铲5升降,承载能力强。
61.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。