1.本实用新型涉及物流运输技术领域,具体涉及一种物品装卸系统。
背景技术:
2.仓储系统一般是利用一定的空间放置物品,且同时具备收货、存货、取货和发货等功能。现有仓储系统运输物品时,一般是利用人工驱使叉车或起吊机等装置进行手动装卸,但是人工实现全天候装卸的成本较高,且在夜晚也容易出现疲劳,从而导致装卸效率较低。
技术实现要素:
3.本实用新型的主要目的在于提供一种物品装卸系统,以解决背景技术中提出的技术问题。
4.为实现上述目的,本实用新型提出的物品装卸系统包括:
5.若干第一摄像部件,用于识别位于存储空间内的物品上的标签并生成第一数据信息;
6.控制设备,所述控制设备与所述若干第一摄像部件通信连接、以根据所述第一摄像部件输出的第一数据信息计算物品的空间坐标;
7.抓取设备,所述抓取设备与所述控制设备通信连接、以根据所述控制设备输出的空间坐标抓取位于所述存储空间内的物品,所述抓取设备包括抓取头和驱动所述抓取头移动的驱动装置。
8.优选地,相邻两个所述第一摄像部件的识别区域至少部分重叠。
9.优选地,所述第一摄像部件为长焦相机。
10.优选地,所述抓取头为夹持式或吸附式。
11.优选地,所述抓取头上设有与所述控制设备通信连接的第二摄像部件,所述第二摄像部件用于识别物品上的标签并生成第二数据信息,所述控制设备根据所述第二摄像部件输出的所述第二数据信息控制所述驱动装置调整所述抓取头的位置。
12.优选地,所述抓取头上还设有与所述控制设备通信连接的姿态传感器,所述姿态传感器用于检测所述抓取头的姿态信息,所述控制设备根据所述姿态传感器输出的所述姿态信息控制所述第二摄像部件。
13.优选地,所述抓取设备还包括与所述控制设备通信连接的第一距离传感器,所述第一距离传感器用于检测所述抓取头与物品顶面之间的距离。
14.优选地,所述抓取头包括驱动件和至少两个夹持部,所述驱动件驱动所述至少两个夹持部相互靠近或远离。
15.优选地,所述夹持部上设有与所述控制设备通信连接的第二距离传感器,所述第二距离传感器用于检测所述夹持部与物品侧面之间的距离。
16.优选地,所述抓取设备吊装布置在存储空间的顶部。
17.本实用新型实施例提供的物品装卸系统,通过第一摄像部件识别存储空间内的物
品上的标签后生成第一数据信息,以便于控制设备根据第一数据信息计算物品的空间坐标,最后即可利用控制设备控制抓取设备移动至该空间坐标处并抓取对应的物品,可以实现全天候对物品的自动化装卸,有利于降低装卸成本以及提升装卸效率。
附图说明
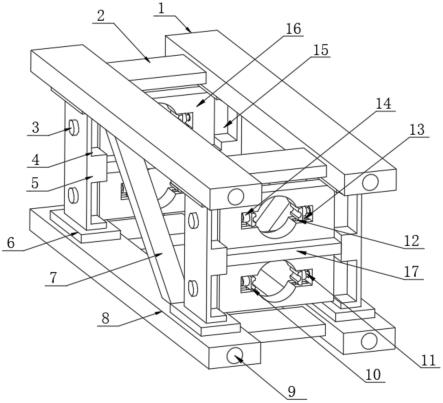
18.图1为本实用新型中物品装卸系统一实施例的结构示意图;
19.图2为图1中所示抓取设备的结构示意图;
20.图3为图1中所示抓取头的结构示意图。
21.附图标号说明
22.标号名称标号名称100第一摄像部件200控制设备300抓取设备310抓取头311驱动件312夹持部313第二摄像部件314姿态传感器315第二距离传感器320驱动装置330第一距离传感器1存储空间2物品
ꢀꢀ
23.本实用新型目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后......)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
26.还需要说明的是,当元件被称为“固定于”或“设置于”另一个元件上时,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为是“连接”另一个元件,它可以是直接连接另一个元件或者可能同时存在居中元件。
27.另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
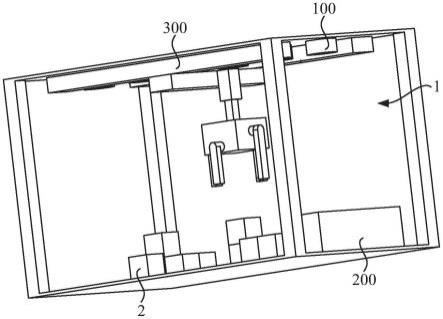
28.本实用新型提出一种物品装卸系统,如图1和图2所示,该物品装卸系统包括:
29.若干第一摄像部件100,用于识别位于存储空间1内的物品2上的标签并生成第一数据信息;
30.控制设备200,控制设备200与若干第一摄像部件100通信连接、以根据第一摄像部件100输出的第一数据信息计算物品2的空间坐标;
31.抓取设备300,抓取设备300与控制设备200通信连接、以用于根据控制设备200输出的空间坐标抓取位于存储空间1内的物品2,抓取设备300包括抓取头310和驱动抓取头310移动的驱动装置320。
32.其中,优选存储空间1由现有建筑内部空间构成,优选存储空间1内或外部设有上下料点,以便于抓取设备300将存储空间1内的物品2抓取至上下料点处或将上下料点的物品2抓取至存储空间1内的特定区域,物品2上的标签可以是一维码、二维码、图形和文字等中的一种或多种组合的形式。第一摄像部件100的数量根据存储空间1的大小进行设置,使得第一摄像部件100的识别区域覆盖整个存储空间1即可,以便于利用各个第一摄像部件100分别识别对应区域内的物品2上的标签并生成第一数据信息。此时,优选物品2的各个侧面均设有上述标签,无论物品2如何摆放在存储空间1内,第一摄像部件100均可采集到物品2上的第一数据信息。控制设备200可以是根据需求设置不同等级的服务器,以便于对第一摄像部件100生成的第一数据信息进行处理,即第一数据信息可以是包括物品2的外形图片、物品2上的文字内容和二维码以及第一摄像部件100自身位置的信息等,从而便于控制设备200根据上述信息计算该物品2的空间坐标以及还可通过物品2的外形图片、物品2上的文字内容或二维码自动识别物品2的类别。当然,控制设备200也可以是仅进行数据交换和存储的功能,第一摄像部件100和抓取设备300均各自具备计算能力。抓取设备300可以是采用avg 机械手的形式,也可以是采用行车的形式,还可以是采用塔吊的形式,以便于在控制设备200提供需要抓取物品2的空间坐标后,抓取设备300可移动至对应的位置并抓取位于该空间坐标处的物品2。此时,驱动装置320可为上述的avg小车、行车或机械手等形式,抓取头310可为夹持式、吸附式等。控制设备200分别与第一摄像部件100和抓取设备300通信连接的方式可以是有线通信连接,也可以是无线通信连接。本实施例中,通过第一摄像部件100识别存储空间1内的物品2上的标签后生成第一数据信息,以便于控制设备200根据第一数据信息计算物品2的空间坐标,最后即可利用控制设备200控制抓取设备300移动至该空间坐标处并抓取对应的物品2,可以实现全天候对物品2的自动化装卸,有利于降低装卸成本以及提升装卸效率。
33.在一较佳实施例中,优选相邻两个第一摄像部件100的识别区域至少部分重叠。其中,将相邻两个第一摄像部件100的识别区域进行部分重叠,从而有利于避免出现不能识别到物品2上的标签的情形。此时,优选第一摄像部件100为长焦相机(如深度相机和双目相机),从而有利于提升识别精度。本实施例中,第一摄像部件100识别到物品2上的标签后,计算出标签中心相对于第一摄像部件100的空间位置,并利用控制设备200计算物品2的空间坐标,对于不同第一摄像部件100识别到同一个物品2时进行融合计算,有利于提升精度。
34.在一较佳实施例中,如图3所示,优选抓取头310上设有与控制设备200通信连接的第二摄像部件313,第二摄像部件313用于识别物品2上的标签并生成第二数据信息,控制设备200根据第二摄像部件313输出的第二数据信息控制驱动装置320调整抓取头310的位置。其中,第二摄像部件313可以采用视觉相机,以便于在驱动装置320驱动抓取头310移动至物品2的上方后再次识别物品2上的标识并生成第二数据信息,第二数据信息内包含的内容可参照上述第一数据信息进行设置,以便于计算此时抓取头310的位置后进行精确控制。
35.在一较佳实施例中,如图3所示,优选抓取头310上还设有与控制设备200通信连接的姿态传感器314,姿态传感器314用于检测抓取头310的姿态信息,控制设备200根据姿态传感器314输出的姿态信息控制第二摄像部件313。其中,姿态传感器314用于检测抓取头310的运动状态,即为移动状态还是静止状态,在抓取头310移动至控制设备200输出的空间坐标后,若姿态传感器314判定抓取头310为静止状态时则启动上述第二摄像部件313,从而有利于提升第二摄像部件313的识别精度。
36.在一较佳实施例中,如图2所示,优选抓取设备300还包括与控制设备200通信连接的第一距离传感器330,第一距离传感器330用于检测抓取头310与物品2顶面之间的距离。其中,第一距离传感器330优选为拉线传感器,此时拉线传感器的本体设置驱动装置320上,拉线传感器的线头设置在抓取头310上,从而便于根据抓取头310移动的距离来计算爪头与物品2顶面的距离。本实施例中,通过设置第一距离传感器330从而有利于控制抓取头310沿竖直方向移动的距离,以便于避免出现抓取头310与物品2抵接后损伤物品2的现象。
37.在一较佳实施例中,如图3所示,优选抓取头310包括驱动件311和至少两个夹持部312,驱动件311驱动至少两个夹持部312相互靠近或远离。其中,夹持部312的数量可根据物品2的大小、重量以及形状进行设置,使得多个夹持部312围合构成夹持空间,从而通过驱动件311驱动多个夹持部312移动以改变夹持空间的大小。
38.在一较佳实施例中,如图3所示,优选夹持部312上设有与控制设备200通信连接的第二距离传感器315,第二距离传感器315用于检测夹持部312与物品2侧面之间的距离。其中,优选第二距离传感器315为接近传感器,从而便于提升近距离检测的精度,此时的各个夹持部312优选同步移动,即采用同一个动力源驱动各个夹持部312移动。本实施例中,通过在各个夹持部312上设置第二距离传感器315,从而便于在夹持物品2之前检测各个夹持部312与物品2对应侧面的距离,若各个夹持部312与物品2各个侧面的距离不一致,则控制驱动装置320驱动抓取头310移动并使得物品2位于夹持空间的中心,即各个夹持部312与物品2对应的各个侧面之间的距离相等,从而由于避免出现抓取头310抓取物品2时出现物品2横向移动的情形。
39.在一较佳实施例中,如图1所示,优选抓取设备300吊装布置在存储空间1的顶部。其中,驱动装置320可以是采用笛卡尔坐标系的形式设置直线模组,以便于驱动抓取头310移动至存储空间1的任意一点。此时,在存储空间1较大时,可以是设置多个抓取设备300,从而便于利用各个抓取设备300负责抓取不同的区域内的物品2。当然,还可优选相邻两个抓取设备300的工作区域至少部分重叠,从而便于需要将物品2放置在其中一个区域内或需要将其中一个区域内的物品2运出时,可同时利用多个抓取设备300同时抓取该区域内的物品2或将物品2放置在该区域。本实施例中,通过将抓取设备300吊装设置在存储空间1的顶部,从而有利于避免抓取设备300占用存储空间1的地面,使得存储空间1可以放置更多的物品2,提高了空间的利用率。
40.以上的仅为本实用新型的部分或优选实施例,无论是文字还是附图都不能因此限制本实用新型保护的范围,凡是在与本实用新型一个整体的构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。