1.本实用新型涉及机电技术领域,尤其涉及一种电机驱动系统和机器人。
背景技术:
2.现有的玩具机器人、教育机器人、行走机器人等设备经常用到直流电机输出扭矩。但是直流电机只能根据控制信号设定的转速进行旋转,而其实际转速可能和设定转速存在偏差,导致转速控制不精确。
技术实现要素:
3.本实用新型提供一种电机驱动系统和机器人,用以解决现有技术中无法获取电机实际转速的缺陷。
4.本实用新型提供一种电机驱动系统,包括:外壳、电机、传动减速机构、磁体、霍尔传感器和控制器;所述电机的转轴与所述传动减速机构连接,所述传动减速机构包括输出轴;所述磁体安装于所述传动减速机构并随所述传动减速机构转动;所述霍尔传感器安装于所述外壳内,所述霍尔传感器与所述磁体相对设置,所述霍尔传感器用于检测所述磁体的磁场变化规律;所述控制器与所述霍尔传感器通信连接,所述控制器用于根据所述磁场变化规律和所述传动减速机构与所述转轴的传动比,计算得到所述电机的实际转速。
5.根据本实用新型提供的电机驱动系统,所述传动减速机构还包括主动齿轮、被动齿轮、第一减速齿轮和第二减速齿轮;所述转轴插接固定于所述主动齿轮,所述主动齿轮啮合于所述第一减速齿轮,所述第一减速齿轮啮合于所述第二减速齿轮;所述输出轴插接固定于所述被动齿轮,所述第二减速齿轮啮合于所述被动齿轮。
6.根据本实用新型提供的电机驱动系统,所述第一减速齿轮和所述第二减速齿轮均设有第一齿轮部和第二齿轮部,所述第一齿轮部的直径小于所述第二齿轮部的直径,所述第一齿轮部和所述第二齿轮部同轴相连;所述第一减速齿轮的第一齿轮部啮合于所述第二减速齿轮的所述第二齿轮部;所述主动齿轮啮合于所述第一减速齿轮的第二齿轮部,所述被动齿轮啮合于所述第二减速齿轮的所述第一齿轮部。
7.根据本实用新型提供的电机驱动系统,所述磁体安装于所述第一减速齿轮或所述第二减速齿轮。
8.根据本实用新型提供的电机驱动系统,所述第一减速齿轮和所述第二减速齿轮为一一对应的多个。
9.根据本实用新型提供的电机驱动系统,所述磁体安装于所述输出轴。
10.根据本实用新型提供的电机驱动系统,所述输出轴的第一端外露于所述外壳,所述输出轴的第二端依次安装有第一传动齿轮和第三传动齿轮,所述第一传动齿轮和所述输出轴固定连接;所述外壳内还安装有第二传动齿轮,所述第二传动齿轮设有第一齿轮部和第二齿轮部,所述第一齿轮部和所述第二齿轮部同轴相连;所述第一传动齿轮啮合于所述第二传动齿轮的所述第一齿轮部,所述第二传动齿轮的所述第二齿轮部啮合于所述第三传
动齿轮;所述磁体安装于所述第三传动齿轮。
11.根据本实用新型提供的电机驱动系统,所述输出轴的第二端安装有限位件;所述限位件和所述第一传动齿轮用于对所述第三传动齿轮形成轴向限位。
12.根据本实用新型提供的电机驱动系统,所述霍尔传感器与所述磁体的距离为0.5mm-1.5mm。
13.本实用新型还提供一种机器人,包括机器人本体和上述任一项所述的电机驱动系统,所述电机驱动系统安装于所述机器人本体。
14.本实用新型提供的电机驱动系统和机器人,通过传动减速机构连接电机的转轴,使两者按某个可知的转速比例同时转动,并且在传动减速机构上安装有磁体,通过霍尔传感器检测磁体的磁场变化规律,从而控制器可以得到磁体的转速,并根据传动比进一步求得电机的转速,以便于精确地控制电机。并且,由于传动减速机构降低了电机的转速,磁体具有的转速小于电机的转速,造成磁场变化较慢,有利于提高霍尔传感器检测磁体转速的精确度,进而提高电机转速测量的精确度。
附图说明
15.为了更清楚地说明本实用新型或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
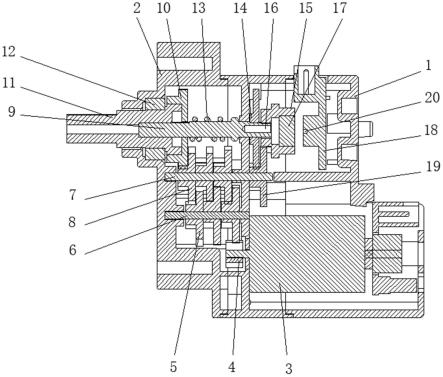
16.图1是本实用新型提供的电机驱动系统的剖视图;
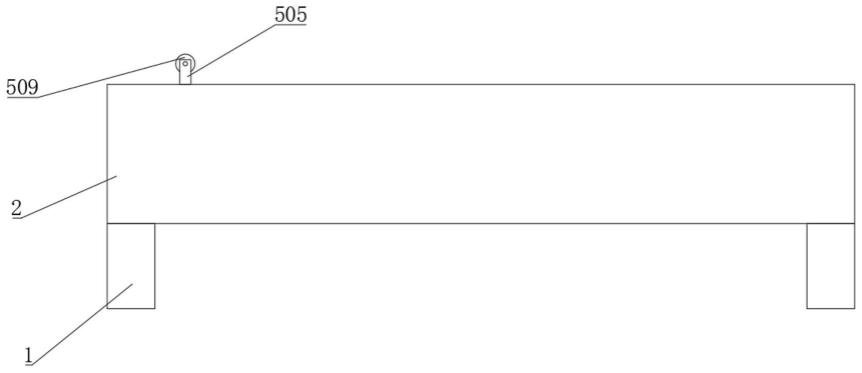
17.图2是本实用新型提供的电机驱动系统的正视图;
18.图3是本实用新型提供的电机驱动系统的左视图。
19.附图标记:
20.1:后端盖;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2:前端盖;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3:电机;
21.4:主动齿轮;
ꢀꢀꢀꢀꢀꢀꢀꢀ
5:第一减速齿轮;
ꢀꢀꢀꢀ
6:第一传动轴;
22.7:第二传动轴;
ꢀꢀꢀꢀꢀꢀ
8:第二减速齿轮;
ꢀꢀꢀꢀ
9:输出内轴;
23.10:被动齿轮;
ꢀꢀꢀꢀꢀꢀꢀ
11:输出外轴;
ꢀꢀꢀꢀꢀꢀꢀ
12:轴承;
24.13:弹簧;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14:第一传动齿轮;
ꢀꢀꢀ
15:第三传动齿轮;
25.16:限位件;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17:磁体;
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
18:pcb;
26.19:第二传动齿轮;
ꢀꢀꢀ
20:霍尔传感器。
具体实施方式
27.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合本实用新型中的附图,对本实用新型中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.如图1-图3所示,本实用新型提供一种电机驱动系统,包括外壳、电机3、传动减速机构、磁体17、霍尔传感器20和控制器。其中,电机3的转轴与传动减速机构连接,传动减速
机构包括输出轴,磁体17安装于传动减速机构并随传动减速机构转动,霍尔传感器20安装于外壳内,霍尔传感器20与磁体17相对设置,用于检测磁体17的磁场变化规律。控制器与霍尔传感器20通信连接,控制器用于根据磁场变化规律和传动减速机构与转轴的传动比,计算得到电机3的实际转速。
29.其中,如图2和图3所示,外壳包括后端盖1和与后端盖1卡合的前端盖2,前端盖2和后端盖1组成一个完成的外壳。
30.其中,如图1所示,电机3安装于外壳内部,传动减速机构的输出轴一端安装于外壳内部,另一端伸出于外壳,且通过轴承12与外壳转动连接。电机3的转轴经减速传动而带动输出轴转动,向外输出扭矩。
31.其中,磁体17和霍尔传感器20构成转速检测装置,其中磁体17安装于传动减速机构并随传动减速机构转动,霍尔传感器20与磁体17相对设置,以检测磁体17的磁场变化规律。霍尔传感器20与控制器通信连接,其中,控制器可以为具有控制功能的印刷电路板(printed circuit boards,pcb)18,霍尔传感器20安装于pcb18。霍尔传感器20根据磁场强弱变化输出电压或电流信号,pcb18根据电压或电流信号的变化频率计算得到磁体17的转速,从而根据传动减速机构与电机3的转轴的传动比,计算得到电机3的实际转速。
32.本实用新型提供的电机驱动系统通过传动减速机构连接电机3的转轴,使二者按某个可知的转速比例同时转动,并且在传动减速机构上安装有磁体17,使磁体17与传动减速机构同步转动,通过霍尔传感器20检测磁体17的磁场变化规律,从而控制器可以得到磁体17的转速,并根据传动比进一步求得电机3的转速,以便于精确地控制电机3。并且,由于传动减速机构降低了电机3的转速,磁体17具有的转速小于电机3的转速,造成磁场变化较慢,有利于提高获取磁体17转速的精确度,相当于提高电机3转速测量的精确度。
33.可选的,霍尔传感器20与磁体17的距离为0.5mm-1.5mm。
34.进一步可选的,霍尔传感器20可以为非接触式磁编码器芯片,芯片中心内置了霍尔感应点矩阵,通过感应相对极磁铁产生正弦和余弦位置信号。芯片内部的模数转换电路对放大后的正弦和余弦信号进行采样,数字信号处理电路进行角度运算,从而输出位置信号,位置信号用于体现磁体17转过的角度。控制器获取位置信号,根据位置信号计算磁体17的转速。
35.可选的,控制器还可以与用于根据实际转速控制电机3的设定转速,或控制器与外部的控制装置通信连接,外部控制装置获取电机3的实际转速并根据实际转速控制电机3的设定转速。
36.在上述实施例的基础上,可选的,传动减速机构可以为多种形式。比如,传动减速机构为同步带传动装置,还包括套接固定于电机3转轴的齿轮、套接固定于输出轴的齿轮和同步带,通过同步带带动输出轴上的齿轮转动,从而带动输出轴转动。此时,磁体17可以安装于输出轴朝向外壳内的一端的端面上。或者,传动减速机构为齿轮减速装置,可以具有一级齿轮减速、二级齿轮减速或三级齿轮减速等多级减速。磁体17可以安装于传动减速机构中的某一级减速齿轮上,也可安装于输出轴朝向外壳一端的端面上。
37.具体的,在一些实施例中,传动减速机构还包括主动齿轮4、被动齿轮10、第一减速齿轮5和第二减速齿轮8。电机3的转轴插接固定于主动齿轮4,主动齿轮4啮合于第一减速齿轮5,第一减速齿轮5啮合于第二减速齿轮8;输出轴插接固定于被动齿轮10,第二减速齿轮8
啮合于被动齿轮10。
38.如图1所示,主动齿轮4套设于电机3的转轴,二者可以通过键或销固定连接,或通过“d”型孔和“d”型轴固定连接,从而同步转动。被动齿轮10套设于输出轴,二者卡接固定同步转动。
39.第一减速齿轮5和第二减速齿轮8分别套设于第一传动轴6和第二传动轴7。可以理解,第一减速齿轮5和第一传动轴6、第二减速齿轮8和第二传动轴7之间的轴向位置相对固定,而周向并不同步转动。通过电机3的转轴和主动齿轮4同步转动,带动第一减速齿轮5转动,带动第二减速齿轮8转动,带动被动齿轮10转动,从而带动输出轴转动。
40.其中,第一减速齿轮5和第二减速齿轮8的齿数可以使被动齿轮10转速低于主动齿轮4的转速,其具体齿数根据实际需求转速设计,本实用新型对此不做限定。
41.在上述实施例的基础上,可选的,第一减速齿轮5和第二减速齿轮8均设有第一齿轮部和第二齿轮部,第一齿轮部的直径小于第二齿轮部的直径,第一齿轮部和第二齿轮部同轴连接;第一减速齿轮5的第一齿轮部啮合于第二减速齿轮8的第二齿轮部;第一减速齿轮5的第二齿轮部啮合于主动齿轮4,第二减速齿轮8的第一齿轮部啮合于被动齿轮10。
42.如图1所示,第一减速齿轮5和第二减速齿轮8可以构造为“凸”字型,即包括一个直径较大的圆柱形台和一个直径较小的圆柱形台,小圆柱形台设于大圆柱形台的一侧,且两者同轴设置。小圆柱形台和大圆柱形台的侧表面均为齿轮齿,从而小圆柱形台形成第一齿轮部,大圆柱形台形成第二齿轮部。第一齿轮部和第二齿轮部可以为一体成型。
43.可选的,第一减速齿轮5和第二减速齿轮8为一一对应的多个。比如,在一个实施例中,第一减速齿轮5和第二减速齿轮8均为三个。如图1所示,三个第一减速齿轮5依次套设于第一传动轴6,三个第二减速齿轮8依次套设于第二传动轴7。以图1中从左至右方向区分三个第一减速齿轮5和三个第二减速齿轮8,可知:主动齿轮4啮合于第三个第一减速齿轮5的第二齿轮部;第三个第一减速齿轮5的第一齿轮部啮合于第三个第二减速齿轮8的第二齿轮部;第三个第二减速齿轮8的第一齿轮部啮合于第二个第一减速齿轮5的第二齿轮部;第二个第一减速齿轮5的第一齿轮部啮合于第二个第二减速齿轮8的第二齿轮部;第二个第二减速齿轮8的第一齿轮部啮合于第一个第一减速齿轮5的第二齿轮部;第一个第一减速齿轮5的第一齿轮部啮合于第一个第二减速齿轮8的第二齿轮部;第一个第二减速齿轮8的第一齿轮部啮合于被动齿轮10。从而,主动齿轮4带动第三个第一减速齿轮5转动,第三个第一减速齿轮5带动第三个第二减速齿轮8转动,第三个第二减速齿轮8带动第二个第一减速齿轮5转动,第二个第一减速齿轮5带动第一个第二减速齿轮8转动,第一个第二减速齿轮8带动被动齿轮10转动。
44.其中,第一减速齿轮5的第二齿轮部直径大于主动齿轮4,第二减速齿轮8的第二齿轮部直径大于第一减速齿轮5的第一齿轮部,被动齿轮10的直径大于第二减速齿轮8的第一齿轮部,从而实现转速的逐级降速。
45.可以理解,第一减速齿轮5和第二减速齿轮8还可以设置两个、四个或其他个数,本实用新型对此不做限定。
46.在上述实施例的基础上,可选的,磁体17可以安装于第一减速齿轮5或第二减速齿轮8。具体的,可以安装于最左侧或最右侧的第一减速齿轮5或第二减速齿轮8的端面上。
47.在上述实施例的基础上,可选的,磁体17还可以安装于传动减速机构的输出轴。
48.具体的,输出轴设有第一端和第二端,输出轴的第一端外露于外壳,第二端安装于外壳内。
49.在一些实施例中,磁体17可以直接固定安装于输出轴的第二端。比如嵌设或套设于输出轴的第二端,从而与输出轴同步转动。
50.在另一些实施例中,输出轴的第二端依次插接于第一传动齿轮14和第三传动齿轮15,其中第一传动齿轮14和输出轴固定连接。外壳内还安装有第二传动齿轮19,第二传动齿轮19设有第一齿轮部和第二齿轮部,第一齿轮部的直径小于第二齿轮部的直径,第一齿轮部和第二齿轮部同轴连接。第一传动齿轮14啮合于第二传动齿轮19的第一齿轮部,第二传动齿轮19的第二齿轮部啮合于第三传动齿轮15,磁体17安装于第三传动齿轮15。
51.可以理解,第一传动齿轮14和输出轴固定连接同步转动,第三传动齿轮15和输出轴在轴向位置相对固定,通过第二传动齿轮19的调节,第三传动齿轮15和第一传动齿轮14以固定转速比例相对转动。
52.其中,如图1所示,第二传动齿轮19可以构造为“凸”字型,即包括一个直径较大的圆柱形台和一个直径较小的圆柱形台,小圆柱形台设于大圆柱形台的一侧,且两者同轴设置。小圆柱形台和大圆柱形台的侧表面均为齿轮齿,从而小圆柱形台形成第一齿轮部,大圆柱形台形成第二齿轮部。第一齿轮部和第二齿轮部可以为一体成型。
53.本实用新型实施例提供的电机驱动系统,磁体17安装于第三传动齿轮15,第三传动齿轮15通过第二传动齿轮19的调节,与输出轴保持固定转速比例的转动。从而在从电机3的转轴到磁体17的转速调节过程中增添一个转速调节环节,更便于调节磁体17的转速范围,以提高霍尔传感器20检测磁场变化、检测磁体17转速的精度。
54.在上述实施例的基础上,可选的,如图1所示,输出轴包括输出外轴11和输出内轴9;输出外轴11的第一端设于外壳外部,输出外轴11的第二端固定连接于输出内轴9的第一端。
55.其中,被动齿轮10带动输出外轴11转动,被动齿轮10的一侧端面上设有用于卡接固定于输出外轴11的凹槽,输出内轴9插设于被动齿轮10的中心孔。弹簧13绕设于输出内轴9,并抵接于被动齿轮10的端面。
56.其中,输出内轴9卡接固定于输出外轴11,两者可以通过键连接,或销连接,或输出内轴9的第一端设为“d”型轴,输出外轴11的第二端对应的设有“d”型孔,从而卡接固定。
57.其中,输出内轴9的第二端可以固定安装有磁体17,或安装有第一传动齿轮14和第三传动齿轮15。
58.在上述实施例的基础上,可选的,第二传动齿轮19套设于第一传动轴6上。
59.在上述实施例的基础上,可选的,输出轴的第二端,或输出内轴9的第二端安装有限位件16。限位件16和第一传动齿轮14用于对第三传动齿轮15形成轴向限位。
60.比如,如图1所示,限位件16通过螺钉连接于输出内轴9的第二端端面,且限位件16的面积大于输出内轴9端面面积,从而与第一传动齿轮14形成卡槽,第三传动齿轮15卡接于卡槽中,从而夹设于限位件16和第一传动齿轮14之间,形成轴向限位。
61.另外,本实用新型还提供一种机器人,包括机器人本体和上述任一实施例提供的电机驱动系统,电机驱动系统安装于机器人本体,用于驱动机器人运动,比如驱动机器人腿部、手部或头部等部位转动。
62.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。