1.本发明涉及一种具备支撑受检者的脸的脸支撑部的眼科装置及其控制方法。
背景技术:
2.在眼科中,由眼科装置获取(测量、拍摄以及观察等)受检眼的眼底拍摄像、眼底断层图像、眼屈光力、眼压、角膜内皮细胞的数量以及角膜形状等各种眼特性。在该情况下,从获取的眼特性的精度、准确度以及画质等的观点考虑,眼科装置的测头(光学系统)相对于受检眼的对位,即对准(alignment)非常重要。因此,在眼科装置中,通常进行所谓的全自动对准(以下仅称为自动对准),即在由颚托等脸支撑部支撑受检者的脸的状态下,检测受检眼相对于测头的相对位置,基于该检测结果,使光学系统相对于受检眼进行相对移动,由此自动进行对准。
3.例如,在专利文献1以及专利文献2中,公开了一种眼科装置,使用配置在与被脸支撑部支撑的脸相向的位置的立体相机,从相互不同的方向同时拍摄受检眼的前眼部。在该眼科装置中,基于对立体相机的拍摄像进行解析而得到的受检眼的三维位置,进行测头相对于受检眼的自动对准。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2013-248376号公报
7.专利文献2:日本特开2014-200678号公报
技术实现要素:
8.发明要解决的问题
9.但是,在受检者的脸未被颚托等脸支撑部正确地支撑的情况下,例如在受检者的脸从颚托浮起的情况下,在获取受检眼的眼特性中,脸(受检眼)会移动。其结果是,获取的眼特性的精度变低或获取眼特性有可能失败。例如在进行受检眼的眼底拍摄的情况下,若在该拍摄中脸移动,则眼底拍摄像产生模糊以及光晕,或拍摄失败。无论如何提高自动对准的精度,这样的问题也无法得到解决。
10.本发明是鉴于这样的情况而做出的,其目的在于,提供一种眼科装置及其控制方法,能够高精度且可靠地获取受检眼的眼特性。
11.用于解决问题的手段
12.用于达成本发明的目的的眼科装置具有:脸支撑部,支撑受检者的脸;前眼部像获取部,反复获取被脸支撑部支撑的脸的受检眼的前眼部像;瞳孔像检测部,基于由前眼部像获取部反复获取到的前眼部像,对每个前眼部像检测受检眼的瞳孔像;以及判断部,基于瞳孔像检测部对每个前眼部像的瞳孔像的检测结果,判断脸是否被脸支撑部正确地支撑。
13.根据该眼科装置,能够在受检者的脸被脸支撑部正确地支撑的状态下获取受检眼的眼特性。
14.在本发明的其他状态的眼科装置中,前眼部像获取部从多个相机反复获取前眼部像,多个相机从相互不同的方向拍摄受检眼,瞳孔像检测部具有:第一检测部,从由多个相机中的第一相机拍摄到的前眼部像,检测瞳孔像,推定部,基于第一检测部的检测结果,对既是由多个相机中的与第一相机不同的第二相机拍摄到的前眼部像所包括的瞳孔像也是根据受检眼的固视微动而移动的瞳孔像的存在范围进行推定,第二检测部,基于推定部的推定结果,从由第二相机拍摄到的前眼部像的存在范围内检测瞳孔像,以及反复控制部,每当前眼部像获取部获取前眼部像,就使第一检测部、推定部以及第二检测部反复工作;判断部基于第二检测部的反复的检测结果,判断脸是否被脸支撑部正确地支撑。由此,能够在受检者的脸被脸支撑部正确地支撑的状态下获取受检眼的眼特性。
15.在本发明的其他状态的眼科装置中,前眼部像获取部执行第一次图像获取处理和第二次以后的图像获取处理,在第一次图像获取处理中,自从相互不同的方向拍摄受检眼的第一相机以及第二相机获取前眼部像,在第二次以后的图像获取处理中,从第二相机反复获取前眼部像,瞳孔像检测部具有:第一检测部,从在第一次图像获取处理中前眼部像获取部从第一相机获取到的前眼部像,检测瞳孔像,推定部,基于第一检测部的检测结果,对既是前眼部像获取部从第二相机获取到的前眼部像中包括的瞳孔像也是根据受检眼的固视微动而移动的瞳孔像的存在范围进行推定,第二检测部,基于推定部的推定结果,自前眼部像获取部从第二相机获取到的前眼部像的存在范围内,检测瞳孔像,以及反复控制部,每当前眼部像获取部在第二次以后的图像获取处理中从第二相机获取前眼部像,就使第二检测部反复工作;判断部基于第二检测部的反复的检测结果,判断脸是否被脸支撑部正确地支撑。由此,能够缩短判断部的判断结束所需要的时间。
16.在本发明的其他方式的眼科装置中,判断部基于第二检测部的反复的检测结果,在存在范围内检查出瞳孔像持续预先设定的预定时间以上的情况下,判断为脸被脸支撑部正确地支撑,在存在范围内检查出瞳孔像未持续预定时间以上的情况下,判断为脸未被脸支撑部正确地支撑。由此,能够在受检者的脸被脸支撑部正确地支撑的状态下获取受检眼的眼特性。
17.在本发明的其他方式的眼科装置中,推定部基于第一检测部的检测结果,创建从由第一相机拍摄到的前眼部像示出瞳孔像的存在范围以及形状的模板,第二检测部基于推定部创建的模板,通过模板匹配,从由第二相机拍摄到的前眼部像的存在范围内,检测瞳孔像。由此,能够从由第二相机拍摄到的前眼部像简易地检测出瞳孔像。
18.在本发明的其他方式的眼科装置中,前眼部像获取部从自相互不同的方向拍摄受检眼的多个相机中的任意一个相机反复获取前眼部像。由此,使用现有的一个相机,能够判断脸是否被脸支撑部正确地支撑。
19.在本发明的其他方式的眼科装置中,具有:眼特性获取部,通过物镜获取受检眼的眼特性,以及前眼部观察系统,通过物镜拍摄受检眼;前眼部像获取部从前眼部观察系统反复获取前眼部像。由此,使用现有的前眼部观察系统,能够判断脸是否被脸支撑部正确地支撑。
20.在本发明的其他方式的眼科装置中,具有:眼特性获取部,通过物镜获取受检眼的眼特性;眼科装置主体,容置眼特性获取部;相对移动机构,使眼科装置主体相对于受检眼进行相对移动;相对位置检测部,基于前眼部像获取部获取到的前眼部像,检测受检眼相对
于眼科装置主体的相对位置;对准控制部,基于相对位置检测部的检测结果,驱动相对移动机构,执行眼科装置主体相对于受检眼的对准。由此,能够并行执行判断脸是否被脸支撑部正确地支撑的处理以及自动对准的处理。
21.在本发明的其他方式的眼科装置中,具有报告部,在判断部判断为脸未被脸支撑部正确地支撑的情况下,报告部报告判断部的判断结果。由此,能够向检测者报告脸未被脸支撑部正确地支撑。
22.在本发明的其他方式的眼科装置中,具有:支撑位置变更机构,变更脸支撑部对脸的支撑位置,报告部驱动支撑位置变更机构,使支撑位置变更。由此,能够向受检者报告脸未被脸支撑部正确地支撑。
23.在本发明的其他方式的眼科装置中,具有:支撑位置变更机构,变更脸支撑部对脸的支撑位置;支撑位置变更控制部,在判断部判断为脸未被脸支撑部正确地支撑的情况下,驱动支撑位置变更机构,变更脸的支撑位置;以及再判断控制部,在脸的支撑位置被支撑位置变更机构变更了的情况下,使前眼部像获取部、瞳孔像检测部以及判断部反复工作。由此,检测者不用进行任何操作或提醒,便能够由脸支撑部正确地支撑脸,因此能够减少检测者的精力和时间。
24.为了达成本发明的目的的眼科装置的控制方法,具有:前眼部像获取步骤,反复获取被对受检者的脸进行支撑的脸支撑部支撑的脸的受检眼的前眼部像;瞳孔像检测步骤,基于通过前眼部像获取步骤反复获取到的前眼部像,对每个前眼部像检测受检眼的瞳孔像;以及判断步骤,基于瞳孔像检测步骤的对每个前眼部像的瞳孔像的检测结果,判断脸是否被脸支撑部正确地支撑。
25.发明效果
26.本发明能够高精度且可靠地获取受检眼的眼特性。
附图说明
27.图1是从受检者侧观察到的第一实施方式的眼科装置的正面立体图。
28.图2是从检测者侧观察到的眼科装置的背面立体图。
29.图3是透镜容纳部的主视图。
30.图4是示出眼科装置的测头的构成的一例的概略图。
31.图5是第一实施方式的运算控制单元的功能框图。
32.图6是用于说明由第一检测部进行的瞳孔像的检测处理的说明图。
33.图7是用于说明由推定部创建模板的说明图。
34.图8是用于说明由第二检测部进行的从前眼部像检测瞳孔像的检测处理的说明图。
35.图9是示出由监视器显示警告信息的一例的说明图。
36.图10是示出向受检者报告受检者的脸未被脸支撑部正确地支撑的例子的说明图。
37.图11是示出由第一实施方式的眼科装置进行的受检眼的眼特性的获取处理,尤其是脸支撑判断处理的流程的流程图。
38.图12是示出由第二实施方式的眼科装置进行的受检眼的眼特性的获取处理,尤其是本发明的眼科装置的控制方法中的脸支撑判断处理的流程的流程图。
39.图13是第三实施方式的眼科装置的运算控制单元的功能框图。
40.图14是示出由第三实施方式的眼科装置进行的受检眼的眼特性的获取处理,尤其是本发明的眼科装置的控制方法中的脸支撑判断处理的流程的流程图。
具体实施方式
41.[第一实施方式的眼科装置的整体构成]
[0042]
图1是从受检者侧观察到的第一实施方式的眼科装置10的正面立体图。图2是从检测者侧观察到的眼科装置10的背面立体图。此外,图中的x方向为以受检者为基准的左右方向(图4所示的受检眼e的眼宽方向),y方向为上下方向,z方向为与接近受检者的前方向以及远离受检者的后方向平行的前后方向(也称为工作距离方向)。
[0043]
如图1以及图2所示,眼科装置10是由眼底相机以及光学相干断层扫描仪组合而成的多功能设备,光学相干断层扫描仪使用光学相干断层扫描(optical coherence tomography:oct)得到作为断层图像的oct图像。眼科装置10获取(测量、拍摄以及观察等)眼底ef(参照图4)的眼底拍摄像以及oct图像,来作为受检眼e(参照图4)的眼特性。该眼科装置10具有底座11、脸支撑部12、架台13以及测头14。
[0044]
在底座11上设置有架台13。另外,在底座11内容纳有后述的运算控制单元22(参照图4)。
[0045]
在测头14的z方向的前方向侧的位置,脸支撑部12与底座11设置为一体。该脸支撑部12具有能够在y方向(上下方向)上调整位置的颚托12a以及额挡12b,将受检者的脸支撑在与测头14(后述物镜43)等眼科装置主体相向的位置。
[0046]
另外,在脸支撑部12设置有与本发明的支撑位置变更机构相当的电动升降机构12c。电动升降机构12c为马达驱动机构等公知的致动器,在后述的运算控制单元22(参照图4)的控制下,使颚托12a以及额挡12b在y方向上移动,由此变更受检者的脸的支撑位置。
[0047]
而且,在脸支撑部12设置有外部固视灯15。外部固视灯15具有出射固视光的光源,能够任意调整该光源的位置以及固视光的出射方向。该外部固视灯15在外部固视中使用。外部固视是如下所述的固视方式,即通过调整外部固视灯15的光源的位置使受检眼e(参照图4)向任意的方向转动,或使其转动得比内部固视时更大,或在无法进行内部固视的情况下,通过引导受检眼e或对侧眼的视线来调整受检眼e的朝向。
[0048]
架台13设置为能够相对于底座11在x方向以及z方向(前后左右方向)上移动。在该架台13上设置有操作部16。另外,测头14以能够在y方向上移动的方式设置于架台13上。
[0049]
另外,在架台13上设置有与本发明的相对移动机构相当的电动驱动机构17(参照图4)。电动驱动机构17为马达驱动机构等公知的致动器,在后述的运算控制单元22(参照图4)的控制下,使架台13在xz方向上移动,且使测头14在y方向上移动。由此,测头14相对于受检眼e在xyz方向上相对移动。
[0050]
操作部16设置于架台13上且测头14的z方向的后方向侧(检测者侧)的位置。在操作部16上,除了设置有用于进行眼科装置10的各种操作的操作按钮之外,还设置有操作杆16a。
[0051]
操作杆16a是用于手动地使测头14在xyz的各方向上移动的操作构件。例如,若对操作杆16a在z方向(前后方向)或x方向(左右方向)上进行倾倒操作,则由上述电动驱动机
构17(参照图4)使测头14在z方向或x方向上移动。另外,若操作杆16a被绕其长轴旋转操作,则根据其旋转操作方向,由电动驱动机构17使测头14在y方向(上下方向)上移动。
[0052]
测头14构成本发明的眼科装置主体。在该测头14中内置有后述的图4所示的眼底相机单元14a以及oct单元14b。另外,在测头14的z方向的后方向侧(检测者侧)的背面设置有监视器18。另外,在测头14的z方向的前方向侧(受检者侧)的正面设置有透镜容纳部19。
[0053]
监视器18使用例如触摸屏式的液晶显示装置。该监视器18显示受检眼e(参照图4)的各种拍摄数据以及用于各种设定操作的输入画面等。
[0054]
图3是透镜容纳部19的主视图。如图3所示,透镜容纳部19容置有物镜43,物镜43构成眼底相机单元14a(参照图4)的一部分且具有与z方向平行的光轴oa。另外,在透镜容纳部19以包围物镜43的方式设置有沿着物镜43的周向等间隔配置的8个固视孔19a(也称为固视灯)。各固视孔19a根据操作部16的操作而选择性地在z方向上出射固视光。
[0055]
各固视孔19a在周边固视以及受检眼e(参照图4)的房角(虹膜边缘)的拍摄等中使用。周边固视是通过选择性地点亮各固视孔19a,使受检眼e向期望的方向大幅转动的固视方式。
[0056]
另外,在测头14的正面且透镜容纳部19的附近位置设置有相当于本发明的多个相机的立体相机20。立体相机20具有第一相机20a以及第二相机20b。第一相机20a以及第二相机20b以从物镜43的左右夹住物镜43的方式配置在测头14的z方向的前方向侧的面(与受检眼e相向的面)。
[0057]
图4是示出眼科装置10的测头14的构成的一例的概略图。如图4所示,测头14具有眼底相机单元14a、oct单元14b、立体相机20以及运算控制单元22等。
[0058]
眼底相机单元14a具有与以往的眼底相机大致相同的光学系统,通过物镜43,获取(拍摄)受检眼e的前眼部ea等的各种观察像并获取作为受检眼e的眼特性的眼底ef的眼底拍摄像。oct单元14b通过物镜43以及眼底相机单元14a的一部分光学系统,获取作为受检眼e的眼特性的眼底ef的oct图像。因此,眼底相机单元14a作为本发明的眼特性获取部以及前眼部观察系统发挥功能。另外,oct单元14b作为本发明的眼特性获取部发挥功能。
[0059]
运算控制单元22容置在底座11(也可以在测头14内)内,是执行各种运算处理以及控制处理等的个人电脑等运算处理装置。
[0060]
[眼底相机单元]
[0061]
眼底相机单元14a作为用于获取前眼部ea等观察像以及眼底拍摄像的光学系统具有照明光学系统30以及摄像光学系统50,眼底拍摄像是表现眼底ef的表面形态的二维图像。
[0062]
照明光学系统30对眼底ef照射照明光。摄像光学系统50将被眼底ef反射的照明光的眼底反射光向例如cmos(complementary metal oxide semiconductor:互补金属氧化物半导体)型或ccd(charge coupled device:电荷耦合元件)型的摄像元件57、60引导。另外,摄像光学系统50将从oct光学系统80(oct单元14b)输出的信号光引导至眼底ef,并将经由眼底ef的信号光引导至oct光学系统80。
[0063]
照明光学系统30具有观察光源31、反光镜32、聚光透镜33、可见光截止滤光片34、拍摄光源35、反射镜36、中继透镜37、38、光圈39、中继透镜40、穿孔镜41、分色镜(dichroic mirror)42以及物镜43等。
[0064]
摄像光学系统50除了具有已述的物镜43、分色镜42以及穿孔镜41之外,还具有聚焦透镜51、反射镜52、半反射镜53、视标显示部54、分色镜55、聚光透镜56、摄像元件57、反射镜58、聚光透镜59以及摄像元件60等。
[0065]
观察光源31例如使用卤素灯或者led(light emitting diode:发光二极管)等,出射观察照明光。从观察光源31出射的观察照明光被反光镜32反射,经由聚光透镜33并透过可见光截止滤光片34,由此成为近红外光。透过可见光截止滤光片34的观察照明光在拍摄光源35的附近暂时聚光,被反射镜36反射,经由中继透镜37、38、光圈39以及中继透镜40。然后,观察照明光在穿孔镜41的周边部(孔部的周围的区域)被反射,之后透过分色镜42,再被物镜43折射,将眼底ef照明。
[0066]
观察照明光的眼底反射光被物镜43折射,经由分色镜42、在穿孔镜41的中心区域形成的孔部以及聚焦透镜51,之后,被反射镜52反射。而且,该眼底反射光在透过半反射镜53后被分色镜55反射,由此由聚光透镜56成像于摄像元件57的受光面。摄像元件57拍摄(接受)眼底反射光,向后述的运算控制单元22输出摄像信号。运算控制单元22使监视器18显示基于从摄像元件57输出的摄像信号的各种观察像。此外,在摄像光学系统50的焦点被调整至受检眼e的前眼部ea的情况下,在监视器18显示前眼部ea的观察像,在摄像光学系统50的焦点被调整至眼底ef的情况下,在监视器18显示眼底ef的观察像。
[0067]
拍摄光源35例如使用氙气灯或者led光源等,出射拍摄照明光。从拍摄光源35出射的拍摄照明光通过与已述的观察照明光相同的路线照射于眼底ef。拍摄照明光的眼底反射光通过与观察照明光的眼底反射光相同的路线被引导至分色镜55,透过该分色镜55,之后被反射镜58反射,由此由聚光透镜59成像于摄像元件60的受光面。
[0068]
摄像元件60拍摄(接受)眼底反射光,向后述的运算控制单元22输出摄像信号。运算控制单元22使监视器18显示基于从摄像元件60输出的摄像信号的眼底拍摄像。此外,显示各种观察像的监视器18与显示眼底拍摄像的监视器18可以是同一个监视器,也可以相互不同。
[0069]
视标显示部54在通过物镜43将固视标(亮点像)的固视光投射于受检眼e的内部固视中使用,例如使用点阵液晶显示器(lcd:liquid crystal display)以及矩阵发光二极管(led)等。该视标显示部54显示固视标。另外,视标显示部54能够任意设定固视标的显示形态(形状等)以及显示位置。
[0070]
对于在视标显示部54显示的固视标的固视光,其一部分在被半反射镜53反射后,经由反射镜52、聚焦透镜51、分色镜55、穿孔镜41的孔部、分色镜42以及物镜43投射于受检眼e。由此,通过物镜43,对受检眼e呈现固视标以及视力测量用视标等。
[0071]
眼底相机单元14a具有聚焦光学系统70。聚焦光学系统70生成用于(焦点)聚焦于眼底ef的分光标志。聚焦光学系统70除了具有已述的物镜43、分色镜42以及穿孔镜41之外,还具有led71、中继透镜72、分光标志板73、双孔光圈74、反射镜75、聚光透镜76以及反射棒77。
[0072]
在由聚焦光学系统70进行调焦的情况下,反射棒77的反射面设置于照明光学系统30的光路上。从led71出射的聚焦光通过中继透镜72,被分光标志板73分离为2道光束,之后,经由双孔光圈74、反射镜75以及聚光透镜76暂时成像于反射棒77的反射面,并被该反射面朝向中继透镜40反射。进而,聚焦光经由中继透镜40、穿孔镜41、分色镜42以及物镜43投
射于眼底ef。
[0073]
聚焦光的眼底反射光经由物镜43、分色镜42以及穿孔镜41的孔部,其一部分透过分色镜55之后,经由聚焦透镜51、反射镜52、半反射镜53、分色镜55以及聚光透镜56被摄像元件57拍摄。摄像元件57对聚焦光的眼底反射光进行拍摄并输出摄像信号。由此,在监视器18显示观察图像以及分光标志。后述的运算控制单元22与以往相同,解析分光标志的位置,使聚焦透镜51等移动,由此自动进行对焦。另外,检测者也可以基于在监视器18显示的分光标志,手动地进行对焦。
[0074]
分色镜42从眼底拍摄用的光路分支出oct光学系统80的光路。分色镜42使在oct测量中使用的波段的光反射,使眼底拍摄用的光透过。在该oct光学系统80的光路中,从oct单元14b侧依次设置有准直透镜单元(collimator lens unit)81、光路长度变更部82、电扫描仪(galvano scanner)83、聚焦透镜84、反射镜85以及中继透镜86。
[0075]
光路长度变更部82包括例如角隅棱镜(corner cube)以及使之移动的机构。光路长度变更部82能够在图中所示箭头的方向上移动,变更oct光学系统80的光路长度。该光路长度的变更在根据受检眼e的眼轴长度来修改光路长度以及调整干涉状态等中使用。
[0076]
电扫描仪83对通过oct光学系统80的光路的信号光的传播方向进行变更。由此,能够利用信号光对眼底ef进行扫描。电扫描仪83例如包括使信号光在x方向上扫描的电流镜、在y方向上扫描的电流镜以及独立驱动上述电流镜的机构。由此,能够使信号光在xy平面上的任意方向上扫描。
[0077]
[oct单元]
[0078]
oct单元14b具有在获取眼底ef的oct图像中使用的干涉光学系统。该oct单元14b与公知的oct装置相同,将低相干光分割为参考光和信号光,使经由眼底ef的信号光和经由参考光路的参考光干涉,生成干涉光,检测该干涉光的光谱成分。oct单元14b的检测结果(检测信号)向运算控制单元22输出。此外,oct单元14b的具体构成为公知技术(例如参照上述专利文献1),因此在此省略具体说明。
[0079]
[立体相机]
[0080]
构成立体相机20的第一相机20a以及第二相机20b从相互不同的方向,在本实施方式中为从左右方向同时(包括大致同时)且连续地拍摄(视频拍摄)前眼部ea。此外,图中的附图标记ob为第一相机20a以及第二相机20b的光轴。
[0081]
第一相机20a从左右方向中的一方向侧连续拍摄前眼部ea,向运算控制单元22输出作为该前眼部ea的观察像的前眼部像d1(参照图5)。第二相机20b从左右方向中的另一方向侧连续拍摄前眼部ea,向运算控制单元22输出作为该前眼部ea的观察像的前眼部像d2(参照图5)。此外,第一相机20a以及第二相机20b的配置也可以颠倒。上述前眼部像d1、d2在脸支撑判断(也称为颚托判断)以及测头14相对于受检眼e的自动对准中使用,脸支撑判断是指,判断受检者的脸是否被脸支撑部12正确地(合适地)支撑。
[0082]
[运算控制单元]
[0083]
图5为第一实施方式的运算控制单元22的功能框图。如图5所示,运算控制单元22具有综合控制部90、存储部92、图像形成部94以及数据处理部96等。另外,已述的电动升降机构12c、眼底相机单元14a、oct单元14b、外部固视灯15、操作部16、电动驱动机构17、监视器18、固视孔19a以及立体相机20等与运算控制单元22连接。
[0084]
存储部92除了存储有综合控制部90所执行的控制程序以外,还存储有oct图像的图像数据、眼底像的图像数据以及受检眼信息(包括受检者信息)等。另外,存储部92存储有后述的模板120。
[0085]
图像形成部94与oct单元14b共同构成本发明的眼特性获取部,对从oct单元14b输入的检测信号进行解析,形成眼底ef的oct图像。此外,oct图像的具体形成方法与以往的oct装置相同,因此在此省略说明。数据处理部96对由图像形成部94形成的oct图像、由眼底相机单元14a获取到的眼底拍摄像和各种观察像、以及由立体相机20获取到的前眼部像d1、d2等实施图像处理等。
[0086]
综合控制部90对眼科装置10的各部分的动作进行综合控制。该综合控制部90基于从立体相机20输入的前眼部像d1、d2执行脸支撑判断,在判断为脸被脸支撑部12正确地支撑的情况下,基于前眼部像d1、d2执行自动对准。然后,综合控制部90在自动对准后控制眼底相机单元14a以及oct单元14b,执行眼底ef的眼底拍摄像以及oct图像等的获取。此外,在图5中,仅图示出脸支撑判断、自动对准以及受检眼e的眼特性(眼底拍摄像以及oct图像)的获取的功能,其他功能为公知技术,因此省略具体的图示。
[0087]
综合控制部90的功能使用各种处理器(processor)实现。各种处理器包括cpu(central processing unit:中央处理单元)、gpu(graphics processing unit:图形处理单元)、asic(application specific integrated circuit:专用集成电路)以及可编程逻辑器件(例如spld(simple programmable logic devices:简单可编程逻辑器件)、cpld(complex programmable logic device:复杂可编程逻辑器件)以及fpga(field programmable gate arrays:现场可编程门阵列))等。此外,综合控制部90的各种功能可以由1个处理器实现,也可以由同种或不同种的多个处理器实现。
[0088]
在获取受检眼e的眼特性(眼底拍摄像以及oct图像)时,综合控制部90作为前眼部像获取部100、瞳孔像检测部102、判断部104、报告控制部106、相对位置检测部108、对准控制部110以及眼特性获取控制部112发挥功能。此外,描述为运算控制单元22的“~部”的内容,也可以是“~电路”、“~装置”或者“~设备”。即,描述为“~部”的内容,也可以由固件、软件、硬件或这些的组合中的任一种构成。
[0089]
[脸支撑判断]
[0090]
前眼部像获取部100在脸支撑判断以及自动对准两者中使用,作为分别与立体相机20的第一相机20a以及第二相机20b有线连接或者无线连接的图像输入接口发挥功能。该前眼部像获取部100从对前眼部ea连续拍摄的第一相机20a以及第二相机20b分别反复获取前眼部像d1、d2,且将获取到的前眼部像d1、d2反复输出至瞳孔像检测部102和相对位置检测部108。
[0091]
瞳孔像检测部102在脸支撑判断中使用。该瞳孔像检测部102基于从前眼部像获取部100反复输入的前眼部像d1、d2,对每个前眼部像d1、d2反复执行检测处理,检测处理为从前眼部像d1、d2检测受检眼e的瞳孔的像即瞳孔像116(参照图6)的处理。此外,由瞳孔像检测部102进行的瞳孔像116的检测处理与后述的在自动对准时由相对位置检测部108进行的瞳孔像116的检测处理不同,只要能够在受检眼e的固视微动的范围内检测出瞳孔像116即可,因此是简易的处理。
[0092]
瞳孔像检测部102作为第一检测部102a、推定部102b、第二检测部102c以及反复控
制部102d发挥功能。
[0093]
图6是用于说明由第一检测部102a进行的瞳孔像116的检测处理的说明图。如图6以及已述的图5所示,第一检测部102a从由第一相机20a拍摄到的前眼部像d1检测瞳孔像116。此外,在第一相机20a以及第二相机20b中,可以将拍摄到更清晰的前眼部ea的像的一者作为“第一相机20a”,将剩下的作为“第二相机20b”。
[0094]
第一检测部102a例如对全尺寸的前眼部像d1实施公知的二值化处理、标记处理以及圆形度滤波处理。标记处理是对被二值化的前眼部像d1的各像素中连续的白色像素或者黑色像素赋予相同标记(分配相同编号)的处理。圆形度滤波处理是从标记处理后的前眼部像d1检测圆形度在预先设定的预定值以上的区域的处理。由此,第一检测部102a能够从前眼部像d1检测出瞳孔像116,向推定部102b输出表示该瞳孔像116的形状以及位置的检测结果。
[0095]
此外,由第一检测部102a从前眼部像d1检测出瞳孔像116的检测方法不限于上述方法(二值化处理、标记处理以及滤波处理),也可以使用公知的方法,尤其优选能够简易地检测的方法。
[0096]
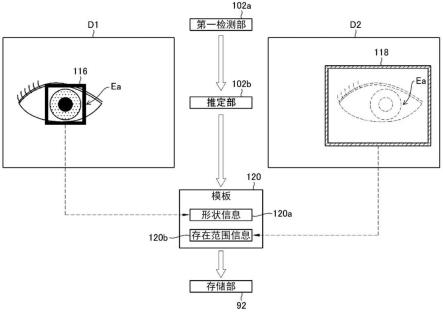
图7是用于说明推定部102b创建模板120的说明图。如图7以及图5所示,推定部102b基于第一检测部102a对前眼部像d1内的瞳孔像116的检测结果,创建在后述第二检测部102c从前眼部像d2内检测瞳孔像116的检测(模板匹配)中使用的模板120。
[0097]
具体地说,推定部102b基于由第一检测部102a检测到的前眼部像d1内的瞳孔像116的形状,推定前眼部像d2内的瞳孔像116的形状,创建出与该推定结果相当的形状信息120a。
[0098]
另外,推定部102b基于由第一检测部102a检测到的前眼部像d1内的瞳孔像116的位置,推定前眼部像d2内的瞳孔像116的存在范围118,创建与该推定结果相当的存在范围信息120b。该存在范围118表示根据受检眼e的固视微动而在前眼部像d2内移动的瞳孔像116所存在的范围。此外,在图7(后述的图8同样)中,为了防止附图复杂化,将存在范围118图示得比实际夸张。
[0099]
其中,存在范围信息120b的生成方法不特别限定,第一相机20a以及第二相机20b的位置关系以及拍摄倍率为公知。因此,推定部102b能够基于由第一检测部102a检测到的前眼部像d1内的瞳孔像116的位置推定前眼部像d2内的瞳孔像116的位置。另外,关于瞳孔像116根据受检眼e的固视微动而在前眼部像d2内进行什么程度的位移,也能够通过实验或者模拟等预先求出。因此,推定部102b能够基于第一检测部102a的检测结果、第一相机20a以及第二相机20b的位置关系和拍摄倍率以及瞳孔像116根据受检眼e的固视微动而产生的位移量,推定存在范围118并创建存在范围信息120b。
[0100]
然后,推定部102b创建包括形状信息120a以及存在范围信息120b的模板120,将该模板120存储在存储部92中。
[0101]
图8是用于说明第二检测部102c从前眼部像d2检测瞳孔像116的检测处理的说明图。如图8以及图5所示,第二检测部102c基于存储在存储部92内的模板120(形状信息120a以及存在范围信息120b),通过公知的模板匹配,从前眼部像d2的存在范围118内检测瞳孔像116。具体地说,第二检测部102c基于存在范围信息120b来确定前眼部像d2内的存在范围118,从该存在范围118内检测具有与形状信息120a对应的形状的瞳孔像116。
[0102]
此外,第二检测部102c例如也可以通过进行与已述的第一检测部102a相同的瞳孔像116的检测处理来代替模板匹配,从前眼部像d2内的存在范围118检测瞳孔像116。
[0103]
每当前眼部像获取部100从第一相机20a以及第二相机20b反复获取前眼部像d1、d2,反复控制部102d就使第一检测部102a、推定部102b以及第二检测部102c反复工作。由此,反复执行以下操作,即第一检测部102a从前眼部像d1检测瞳孔像116,推定部102b创建模板120以及第二检测部102c从前眼部像d2(存在范围118)检测瞳孔像116。
[0104]
返回图5,判断部104基于第二检测部102c的反复的检测结果进行脸支撑判断。其中,在受检者的脸被脸支撑部12正确地支撑的情况下,该脸的移动基本被抑制。因此,前眼部像d2内的瞳孔像116即使根据受检眼e的固视微动而在前眼部像d2内移动,也在预定时间内处于存在范围118内。反之,在受检者的脸从颚托12a浮起等脸未被脸支撑部12正确地支撑的情况下,脸会发生移动。因此,瞳孔像116处于前眼部像d2的存在范围118内的状态无法持续预定的时间。因此,判断部104基于第二检测部102c的反复的检测结果,判断在预先设定的预定时间内被脸支撑部12支撑的脸有无移动,由此能够进行脸是否被脸支撑部12正确地支撑的脸支撑判断。
[0105]
具体地说,判断部104基于第二检测部102c的反复的检测结果,判断从前眼部像d2的存在范围118内连续检测出瞳孔像116的连续检测次数是否达到预定次数,即从存在范围118内检测出瞳孔像116是否持续(连续)预先设定的预定时间以上。
[0106]
而且,在从存在范围118内检测出瞳孔像116持续预定时间以上的情况下,判断部104判断为被脸支撑部12支撑的受检者的脸没有移动,判断为脸被脸支撑部12正确地支撑。反之,在从存在范围118内检测出瞳孔像116未持续预定时间以上的情况下,判断部104判断为被脸支撑部12支撑的受检者的脸有移动,判断为脸没有被脸支撑部12正确地支撑。
[0107]
在判断部104判断为脸被脸支撑部12正确地支撑的情况下,向相对位置检测部108以及对准控制部110输出该判断结果。另外,在判断部104判断为脸未被脸支撑部12正确地支撑的情况下,向报告控制部106输出该判断结果。
[0108]
图9是示出由监视器18显示(报告)警告信息124的一例的说明图。如图9以及图5所示,在来自判断部104的判断结果输入报告控制部106的情况下,报告控制部106使监视器18显示警告信息124,警告信息124是表示脸未被脸支撑部12正确地支撑的信息。由此,对检测者报告警告信息124。因此,在该情况下,报告控制部106以及监视器18作为本发明的报告部发挥功能。此外,也可以代替由监视器18显示警告信息124而从扬声器(未图示)输出警告信息,或者显示该警告信息124,并且从扬声器(未图示)输出警告信息。
[0109]
图10是示出向受检者报告受检者的脸未被脸支撑部12正确地支撑的例子的说明图。如图10以及图5所示,在来自判断部104的判断结果输入报告控制部106的情况下,报告控制部106驱动电动升降机构12c,例如使颚托12a以及额挡12b在y方向上上下移动,由此变更颚托12a等对脸的支撑位置。由此,能够向受检者报告脸未被脸支撑部12正确地支撑。因此,在该情况下,报告控制部106以及脸支撑部12作为本发明的报告部发挥功能。
[0110]
[自动对准]
[0111]
返回图5,相对位置检测部108以及对准控制部110在自动对准中使用,接受来自判断部104的判断结果的输入而工作。
[0112]
相对位置检测部108基于从前眼部像获取部100输入的前眼部像d1、d2,从前眼部
像d1、d2分别检测出瞳孔像116(瞳孔区域、瞳孔形状),确定与瞳孔中心或者角膜顶点相当的各瞳孔像116的特征位置。接着,相对位置检测部108基于第一相机20a、第二相机20b的位置和拍摄倍率以及前眼部像d1、d2各自的特征位置,通过公知的方法(参照日本特开2013-248376号公报)运算出受检眼e相对于测头14的相对位置(三维位置)。然后,相对位置检测部108将该运算结果作为受检眼e的相对位置的检测结果输出至对准控制部110。
[0113]
其中,与已述的脸支撑判断时的第一检测部102a所进行的检测处理不同,相对位置检测部108从前眼部像d1、d2检测瞳孔像116的检测处理是需要正确地确定已述的特征位置的精密处理。例如该相对位置检测部108对前眼部像d1、d2进行二值化处理,根据二值化处理后的前眼部像d1、d2精密地运算受检眼e的相对位置。
[0114]
对准控制部110基于相对位置检测部108对受检眼e的相对位置的检测结果,驱动电动驱动机构17,执行测头14相对于受检眼e的自动对准。
[0115]
[眼特性的获取]
[0116]
眼特性获取控制部112在自动对准结束后进行工作,执行受检眼e的眼特性(眼底ef的眼底拍摄像以及oct图像)的获取。具体地说,眼特性获取控制部112驱动眼底相机单元14a来获取眼底ef的眼底拍摄像。另外,眼特性获取控制部112驱动oct光学系统80、oct单元14b以及图像形成部94等,获取眼底ef的oct图像。
[0117]
[第一实施方式的眼科装置的作用]
[0118]
图11是示出由上述结构的第一实施方式的眼科装置10进行的受检眼e的眼特性的获取处理,尤其是本发明的眼科装置10的控制方法的脸支撑判断处理的流程的流程图。如图11所示,若检测者接通眼科装置10的电源或者通过操作部16执行开始测量操作(采集操作),则开始获取受检眼e的眼特性(步骤s1)。
[0119]
综合控制部90使第一相机20a以及第二相机20b开始受检眼e的前眼部ea的连续拍摄。由此,前眼部像获取部100从第一相机20a以及第二相机20b分别获取前眼部像d1、d2,向瞳孔像检测部102输出这些前眼部像d1、d2(步骤s2,相当于本发明的前眼部像获取步骤)。
[0120]
若前眼部像d1、d2输入瞳孔像检测部102,则如已述的图6所示,第一检测部102a通过对前眼部像d1实施二值化处理、标记处理以及滤波处理,从前眼部像d1检测出瞳孔像116,将其位置以及形状的检测结果输出至推定部102b(步骤s3)。
[0121]
接着,如已述的图7所示,推定部102b基于来自第一检测部102a的检测结果来推定前眼部像d2内的瞳孔像116的形状以及存在范围118,由此创建模板120(形状信息120a以及存在范围信息120b)(步骤s5)。然后,如已述的图8所示,第二检测部102c基于模板120执行模板匹配,由此从前眼部像d2的存在范围118内检测出瞳孔像116(步骤s6)。
[0122]
在从前眼部像d2的存在范围118内检测出瞳孔像116的情况下,反复控制部102d反复执行从已述的步骤s3至步骤s6的处理(步骤s6中为是,步骤s7中为否)。此外,在未从前眼部像d2的存在范围118内检测出瞳孔像116的情况下,进入后述的步骤s12(步骤s6为否)。此外,步骤s3至步骤s6相当于本发明的瞳孔像检测步骤。
[0123]
以下,每当前眼部像获取部100从第一相机20a以及第二相机20b反复获取前眼部像d1、d2,反复控制部102d就反复执行从已述的步骤s3至步骤s6的处理,直至步骤s7中判断为是或在步骤s6中判断为否为止。
[0124]
判断部104基于第二检测部102c的反复的检测结果,在从前眼部像d2的存在范围
118内连续检测出瞳孔像116的连续检测次数达到预定次数的情况下,即在检测出瞳孔像116持续预先设定的预定时间以上的情况下,判断脸被脸支撑部12正确地支撑(步骤s7中为是,步骤s8)。此外,步骤s8和后述的步骤s12相当于本发明的判断步骤。然后,判断部104向相对位置检测部108以及对准控制部110输出脸被脸支撑部12正确地支撑的判断结果。由此,在脸支撑判断之后,自动开始自动对准。
[0125]
相对位置检测部108基于从前眼部像获取部100输入的前眼部像d1、d2,检测受检眼e相对于测头14的相对位置,将其检测结果输出至对准控制部110(步骤s9)。由此,对准控制部110基于受检眼e的相对位置的检测结果驱动电动驱动机构17,执行测头14相对于受检眼e的自动对准(步骤s10)。
[0126]
若自动对准结束,则眼特性获取控制部112驱动眼底相机单元14a获取眼底ef的眼底拍摄像,或驱动oct光学系统80、oct单元14b以及图像形成部94等获取眼底ef的oct图像。由此,完成受检眼e的眼特性的获取(步骤s11)。
[0127]
另一方面,在第二检测部102c未从前眼部像d2的存在范围118内检测出瞳孔像116的情况下(步骤s6中为否),判断部104判断为脸未被脸支撑部12正确地支撑(步骤s12)。然后,判断部104向报告控制部106输出脸未被脸支撑部12正确地支撑的判断结果。
[0128]
报告控制部106接受来自判断部104的判断结果的输入,如已述的图9以及图10所示,使监视器18显示警告信息124或驱动电动升降机构12c使颚托12a等在y方向上上下移动。由此,向检测者以及受检者报告受检者的脸未被脸支撑部12正确地支撑(步骤s13)。并且,检测者提醒受检者注意或者调整颚托12a等的位置,使得受检者的脸被脸支撑部12正确地支撑。此后,反复执行步骤s1之后的处理。
[0129]
[本实施方式的效果]
[0130]
如上所述,在本实施方式中,能够基于由立体相机20拍摄到的前眼部像d1、d2,判断受检者的脸是否被脸支撑部12正确地支撑,所以能够在受检者的脸被脸支撑部12正确地支撑的状态下执行受检眼e的眼特性的获取。由此,防止脸在受检眼e的眼特性的获取中移动,因此防止获取的眼特性的精度低或眼特性的获取失败。另外,能够使用现有的立体相机20,因此能够仅通过修改软件就进行脸支撑判断。其结果是,能够高精度且可靠地获取受检眼e的眼特性。
[0131]
另外,能够使用由第一相机20a以及第二相机20b拍摄到的前眼部像d1、d2进行脸支撑判断和自动对准,因此能够并行进行脸支撑判断的处理和自动对准的处理(受检眼e的相对位置的检测)。
[0132]
[第二实施方式]
[0133]
接着,说明本发明的第二实施方式的眼科装置10。每当前眼部像获取部100从第一相机20a以及第二相机20b反复获取前眼部像d1、d2,上述第一实施方式的瞳孔像检测部102的反复控制部102d就使第一检测部102a、推定部102b以及第二检测部102c反复工作。由此,反复执行以下操作,即第一检测部102a从前眼部像d1检测瞳孔像116,推定部102b创建模板120以及第二检测部102c从前眼部像d2检测瞳孔像116(模板匹配)。
[0134]
对此,在第二实施方式中,使用(援用)基于首次的前眼部像d1生成的模板120,反复执行第二检测部102c从第二次以后的前眼部像d2的瞳孔像116的检测(模板匹配)。此外,除去前眼部像获取部100以及反复控制部102d的功能不同的点,第二实施方式的眼科装置
10与上述第一实施方式的眼科装置10的构成基本相同。因此,对于功能或者构成上与上述第一实施方式相同的部分,标注相同附图标记并省略其说明。
[0135]
在脸支撑判断处理中,第二实施方式的前眼部像获取部100执行以下处理,即从第一相机20a以及第二相机20b获取前眼部像d1、d2的第一次图像获取处理以及从第二相机20b反复获取前眼部像d2的第二次以后的图像获取处理。
[0136]
每当由第二检测部102c从前眼部像d2的存在范围118内检测出瞳孔像116,第二实施方式的反复控制部102d就使第二检测部102c反复工作,直到判断部104做出判断为止。
[0137]
图12是示出第二实施方式的眼科装置10获取受检眼e的眼特性的获取处理,尤其是示出本发明的眼科装置10的控制方法中的脸支撑判断处理的流程的流程图。此外,步骤s1至步骤s7的处理以及步骤s8以后的处理与图11所示的第一实施方式基本相同,因此省略说明。
[0138]
在步骤s7中判断为否的情况下,前眼部像获取部100从第二相机20b获取前眼部像d2并将该前眼部像d2输出至第二检测部102c(步骤s7a)。此外,在该情况下,可以停止第一相机20a的工作,或者也可以不停止。
[0139]
接着,第二实施方式的反复控制部102d使第二检测部102c反复工作。由此,第二检测部102c基于在第一次图像获取处理后由推定部102b生成的模板120执行模板匹配,从通过第二次的图像获取处理获取到的前眼部像d2检测瞳孔像116(步骤s5、s6)。
[0140]
以下,反复执行以下处理,即由前眼部像获取部100进行的步骤s7a处理以及由第二检测部102c进行的步骤s5、s6的处理,直至步骤s7判断为是或步骤s6判断为否为止。
[0141]
这样,在第二实施方式中,能够执行以下的检测,即基于推定部102b在第一次图像获取处理后生成的模板120,从通过第二次以后的图像获取处理获取到的前眼部像d2检测瞳孔像116。由此,在第二次以后的脸支撑判断处理中,能够省略获取前眼部像d1,从前眼部像d1检测瞳孔像116以及生成模板120的步骤。其结果是,第二次以后的脸支撑判断处理所需要的时间缩短。
[0142]
[第三实施方式]
[0143]
图13为第三实施方式的眼科装置10的运算控制单元22的功能框图。在上述各实施方式中,在判断部104判断为受检者的脸未被脸支撑部12正确地支撑的情况下,由报告控制部106执行该判断结果的报告。与之相对的,在第三实施方式的眼科装置10中,在判断部104判断为受检者的脸未被脸支撑部12正确地支撑的情况下,在变更颚托12a等对脸的支撑位置之后,再次执行脸支撑判断处理。
[0144]
如图13所示,第三实施方式的眼科装置10除了综合控制部90还作为支撑位置变更控制部130以及再判断控制部132发挥功能的点之外,构成与上述各实施方式的眼科装置10基本相同。因此,功能或者构成上与上述各实施方式相同的部分标注有相同附图标记,省略其说明。
[0145]
图14是示出第三实施方式的眼科装置10的受检眼e的眼特性的获取处理,尤其是示出本发明的眼科装置10的控制方法中的脸支撑判断处理的流程的流程图。此外,步骤s1至步骤s12的处理与已述的图12所示的第二实施方式的各处理基本相同,因此省略具体的说明。
[0146]
如图13以及图14所示,若判断部104判断为脸未被脸支撑部12正确地支撑(步骤
s12),则支撑位置变更控制部130工作。该支撑位置变更控制部130驱动电动升降机构12c,变更脸支撑部12对受检者的脸的支撑位置,例如向y方向的上方侧变更脸的支撑位置(步骤s14)。
[0147]
例如,支撑位置变更控制部130驱动电动升降机构12c,将脸支撑部12对脸的支撑位置抬高5mm左右。或者支撑位置变更控制部130对前眼部像获取部100获取到的前眼部像d1、d2的至少一者内的瞳孔像116的位置进行监视(检测),驱动电动升降机构12c使脸支撑部12对脸的支撑位置低速地向y方向的上方侧变更,直至该瞳孔像116的位置变化为止。此外,也可以使受检者的脸的支撑位置向下方侧变更,以代替向y方向的上方侧变更。
[0148]
这样,通过变更脸支撑部12对受检者的脸的支撑位置,尤其是向y方向的上方侧变更,能够将脸支撑部12对受检者的脸的支撑从不正确的状态变为正确的状态,或者能够提醒受检者注意脸未被脸支撑部12正确地支撑。
[0149]
在脸支撑部12对脸的支撑位置已变更的情况下,再判断控制部132控制综合控制部90的各部分(前眼部像获取部100、瞳孔像检测部102以及判断部104),反复执行已述的步骤s1至步骤s7a的处理。由此,反复执行在上述第二实施方式中说明的脸支撑判断处理。此外,可以与已述的图11所示的第一实施方式相同,反复执行已述的步骤s1至步骤s7的处理。
[0150]
以下,反复执行步骤s14、步骤s1至步骤s7a(步骤s7)的处理直至判断部104判断为脸被脸支撑部12正确地支撑为止。
[0151]
这样,在第三实施方式中,在受检者的脸未被脸支撑部12正确地支撑的情况下,通过在变更脸支撑部12对脸的支撑位置的基础上反复执行脸支撑判断处理,检测者不进行任何操作便能够使眼科装置10自动地转移至此后的处理(步骤s9~s11)。由此,能够减少检测者的精力和时间。
[0152]
在上述各实施方式中,举出立体相机20(第一相机20a以及第二相机20b)的例子进行了说明,也可以通过三个以上的多个相机拍摄受检眼e。在该情况下,前眼部像获取部100也反复获取由多个相机中的第一相机20a拍摄到的前眼部像d1以及由多个相机中的一个以上的第二相机20b拍摄到的前眼部像d2。另外,在第一检测部102a对每个由第一相机20a拍摄到的前眼部像d1检测瞳孔像116。而且,推定部102b对每个由一个以上的第二相机20b拍摄到的前眼部像d2推定存在范围118(创建模板120)。而且,第二检测部102c针对每个一个以上的前眼部像d2从存在范围118内检测瞳孔像116。而且,判断部104判断对每个一个以上的前眼部像d2中从存在范围118内连续检测出瞳孔像116的连续检测次数是否达到预定次数。
[0153]
在上述各实施方式中,基于由第一相机20a以及第二相机20b连续拍摄到的前眼部像d1、d2,执行由瞳孔像检测部102进行的对每个前眼部像d1、d2的瞳孔像116的检测以及由判断部104进行的脸支撑判断,但是脸支撑判断中使用的相机也可以为一个。
[0154]
在该情况下,前眼部像获取部100反复获取由第一相机20a以及第二相机20b的任意一者连续拍摄到的前眼部像d1或者前眼部像d2(以下称为单一前眼部像)。另外,瞳孔像检测部102对每个单一前眼部像反复检测瞳孔像116。然后,判断部104基于单一前眼部像内的瞳孔像116的位置处于与受检眼e的固视微动相对应的范围(相当于已述的存在范围118)内的状态是否持续预定时间,来进行脸支撑判断。由此,能够使用一个相机来进行脸支撑判断。
[0155]
另外,在该情况下,前眼部像获取部100也可以从通过物镜43可连续拍摄前眼部ea的摄像光学系统50(相当于本发明的前眼部观察系统)反复获取前眼部ea的观察像。在该情况下,也能够以与使用第一相机20a以及第二相机20b的任意一者的情况相同的方法进行脸支撑判断。
[0156]
在上述各实施方式中,运算控制单元22内置于测头14,也可以设置于底座11以及测头14等的外部。即,本发明的眼科装置10也能够适用于与远程医疗相对应的装置。
[0157]
在上述各实施方式中,作为受检眼e的眼特性的获取举出眼底ef的眼底拍摄像以及oct图像的获取的例子进行了说明,而本发明也适用于获取受检眼e的眼屈光力、眼压、角膜内皮细胞的数量以及角膜形状等各种眼特性的眼科装置10。
[0158]
附图标记说明
[0159]
10
…
眼科装置
[0160]
12
…
脸支撑部
[0161]
12a
…
颚托
[0162]
12b
…
额挡
[0163]
12c
…
电动升降机构
[0164]
14
…
测头
[0165]
14a
…
眼底相机单元
[0166]
14b
…
oct单元
[0167]
16
…
操作部
[0168]
17
…
电动驱动机构
[0169]
18
…
监视器
[0170]
20
…
立体相机
[0171]
20a
…
第一相机
[0172]
20b
…
第二相机
[0173]
22
…
运算控制单元
[0174]
30
…
照明光学系统
[0175]
43
…
物镜
[0176]
50
…
摄像光学系统
[0177]
70
…
聚焦光学系统
[0178]
80
…
oct光学系统
[0179]
90
…
综合控制部
[0180]
100
…
前眼部像获取部
[0181]
102
…
瞳孔像检测部
[0182]
102a
…
第一检测部
[0183]
102b
…
推定部
[0184]
102c
…
第二检测部
[0185]
102d
…
反复控制部
[0186]
104
…
判断部
[0187]
106
…
报告控制部
[0188]
108
…
相对位置检测部
[0189]
110
…
对准控制部
[0190]
112
…
眼特性获取控制部
[0191]
116
…
瞳孔像
[0192]
118
…
存在范围
[0193]
120
…
模板
[0194]
120a
…
形状信息
[0195]
120b
…
存在范围信息
[0196]
124
…
警告信息
[0197]
d1、d2
…
前眼部像
[0198]e…
受检眼
[0199]
ea
…
前眼部
[0200]
ef
…
眼底。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
