1.本发明涉及物料仓储技术领域,尤其涉及一种基于高层物料仓储用存取设备及其控制方法。
背景技术:
2.传统仓储是指利用仓库对各类物资及其相关设施设备进行物品的入库、储存、出库的活动,现代仓储是指在传统仓储的基础上增加库内加工、分拣、库内包装等环节,仓储是生产制造与商品流通的重要环节之一,也是物流活动的重要环节,仓储是集中反映工厂物资活动状况的综合场所,是连接生产、供应、销售的中转站,对促进生产提高效率起着重要的辅助作用,仓储是产品生产、流通过程中因订单前置或市场预测前置而使产品、物品暂时存放,同时,围绕着仓储实体活动,清晰准确的报表、单据帐目、会计部门核算的准确信息也同时进行着,因此仓储是物流、信息流、单证流的合一,为了便于物料的出库与存放,通常采用货架用来搁置物料。
3.现有的仓储货架为了增大使用率,通常会将货架搭建的较高,使得摆放的物料层数较多,对于一些放置在高处的物料在进行存取时,管理人员需要使用扶梯频繁的进行上下攀爬,不仅增加了管理人员的劳动力,且携带物料攀爬较为不便,易产生安全隐患,从而引发安全事故的问题。
4.基于上述问题,因此,提出了一种基于高层物料仓储用存取设备及其控制方法。
技术实现要素:
5.基于现有的仓储货架通常搭建较高,使得管理人员对高处物料进行存取时较为费力,且携带物料攀爬较为不便,易引发安全事故的技术问题,本发明提出了一种基于高层物料仓储用存取设备及其控制方法。
6.本发明提出的一种基于高层物料仓储用存取设备及其控制方法,包括移动底座,所述移动底座的下表面固定安装有呈矩形阵列分布的自锁万向轮,所述移动底座的上表面设置有抬升机构,所述抬升机构包括立板,所述抬升机构对物料进行抬升和下降移动;所述移动底座的上表面设置有平移机构,所述平移机构包括伺服电机,且平移机构位于所述抬升机构一侧,所述平移机构对夹取的物料进行水平移动;所述移动底座的上表面设置有夹取机构,所述夹取机构包括安装架,且夹取机构位于所述抬升机构上方,所述夹取机构对存取的物料进行夹持固定。
7.优选地,所述立板的下表面与所述移动底座的上表面固定连接,所述移动底座的上表面固定连接有推杆,所述立板的一侧表面开设有条形限位孔,所述立板的上表面固定连接有安装板,所述安装板的上表面固定安装有驱动电机,所述驱动电机的输出轴通过联轴器固定安装有第一丝杆。
8.优选地,所述第一丝杆的一端贯穿安装板并通过轴承与所述移动底座的上表面固定套接,所述第一丝杆的外表面螺纹套接有螺纹环,所述螺纹环的外表面固定连接有连接
杆,所述连接杆的一端贯穿条形限位孔并延伸至所述立板的另一侧表面,所述连接杆的一端固定连接有抬升板,所述抬升板的一侧表面与所述立板的另一侧表面接触。
9.优选地,所述抬升板的横截面呈l型形状,抬升板的上表面开设有限位槽,所述抬升板的一侧表面开设有呈对称分布的定位插槽,所述抬升板的一侧表面固定连接有呈对称分布的支座,两个所述支座相对的表面均通过销轴铰接有隔板,所述隔板的两侧表面通过销轴铰接有呈对称分布的支撑杆。
10.优选地,所述支撑杆的一端与所述定位插槽的内壁活动插接,所述抬升板的上表面固定连接有防滑挡条,所述伺服电机的一侧表面与所述抬升板的一侧表面固定安装,所述伺服电机的输出轴通过联轴器固定安装有第二丝杆,所述第二丝杆的外表面螺纹套接有螺纹套筒,所述螺纹套筒的外表面固定连接有限位块,所述限位块的一端贯穿限位槽并延伸至所述抬升板的上表面。
11.优选地,所述限位块的上表面固定连接有移动板,所述安装架的下表面固定连接有呈对称分布的固定块,所述固定块的下表面与所述移动板的上表面固定连接,所述安装架的横截面呈c型形状,所述安装架的一侧表面固定安装有伺服电动缸,所述伺服电动缸活塞杆的一端贯穿并延伸至所述安装架的另一侧表面。
12.优选地,所述伺服电动缸活塞杆的一端固定连接有推动块,所述推动块的外表面活动套接有呈对称分布的移动套,所述移动套的上表面通过销轴铰接有第一摆杆,所述第一摆杆的一端通过销轴与所述安装架的上表面铰接,所述安装架的两端表面固定连接有呈对称分布的固定套。
13.优选地,所述固定套的内壁活动套接有活动杆,所述活动杆的横截面呈l型形状,所述活动杆的下表面固定连接有固定柱,所述固定柱的一端外表面通过轴承固定套接有第二摆杆,所述第二摆杆的一端通过销轴与所述移动套的下表面铰接。
14.优选地,所述活动杆的一端固定连接有扩张块,所述扩张块的一端固定连接有夹块,所述夹块的一侧表面开设有呈线性阵列分布的防滑凹槽。
15.优选地,所述一种基于高层物料仓储用存取设备的控制方法,其控制方法为:步骤一,使用时,将物料放置在移动底座上方,通过握住推杆配合自锁万向轮带动移动底座上的物料进行运输管理,当物料架体积较大时,抓住隔板一端向上翻转,同时将支撑杆从定位插槽内壁取出后,向下翻转隔板,使其呈竖直状态与抬升板一侧接触,此时即可将大体积物料放置在移动底座上进行输送;步骤二,当需要将物料放置在较高的货架上时,先将物料放置在抬升板上方,使其物料位于两个夹块的内侧后,启动驱动电机带动第一丝杆逆时针旋转,第一丝杆的逆时针旋转通过螺纹环带动连接杆在条形限位孔内上升移动,从而带动抬升板进行上升移动,当抬升板上升移动到与待放置物料货架水平时停止驱动电机工作;步骤三,此时启动伺服电动缸活塞杆进行伸出运动,伺服电动缸活塞杆的伸出带动推动块进行移动,推动块的移动通过第一摆杆的配合使其移动套相对移动,移动套的相对移动通过第二摆杆与固定柱的配合带动活动杆相对移动,从而使得活动杆通过扩张块带动夹块相对移动,并对物料进行夹持固定;步骤四,此时启动伺服电机带动第二丝杆逆时针旋转,使其螺纹套筒通过限位块与限位槽的配合进行水平伸出移动,通过限位块带动移动板上的安装架移动,从而带动夹
块夹持的物料进行移动,使其夹块带动物料伸入货架内部后,停止伺服电机工作,同时启动伺服电动缸活塞杆进行回缩运动,此时推动块的移动通过第一摆杆的配合使其移动套相背移动,移动套的相背移动通过第二摆杆与固定柱的配合带动活动杆相背移动,从而使得活动杆通过扩张块带动夹块相背移动,夹块与物料表面脱离取消夹持,此时物料位于货架上方;步骤五,此时启动伺服电机带动第二丝杆顺时针旋转,使其螺纹套筒通过限位块与限位槽的配合进行水平收缩复位移动,从而带动移动板上的安装架复位移动,最后启动驱动电机带动第一丝杆顺时针旋转,使其通过螺纹环与连接杆的配合带动抬升板下降复位,当需要对较高货架上的物料进行拿取时,同理操作即可本发明中的有益效果为:1、通过设置抬升机构、平移机构和夹取机构,从而达到了自动化对高层货架的物料进行拿取和存放,且便于对不同体积的物料进行输送管理,使得管理人员无需使用扶梯频繁上下攀爬,不仅降低了管理人员的劳动力,并且消除了攀爬产生安全隐患的效果。
16.2、通过设置隔板、支座、支撑杆和定位插槽的配合使用,起到通过支撑杆与定位插槽配合插接,使其对隔板水平支撑,便于分层堆放小体积物料,从而可以对抬升板内侧的空间进行合理分配,从而便于对不同体积的物料进行输送管理,提高物料存储时的运输效率的效果。
17.3、通过设置安装架、推动块、移动套、第一摆杆、第二摆杆、固定套、活动杆扩张块和夹块的配合使用,起到在推动块在移动时,第一摆杆与第二摆杆通过安装架的限位配合,使其通过移动套的相对移动带动活动杆进行相对移动,从而使得活动杆带动扩张块上的夹块对物料进行稳定夹持。
附图说明
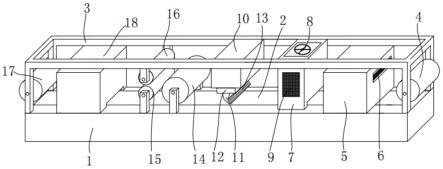
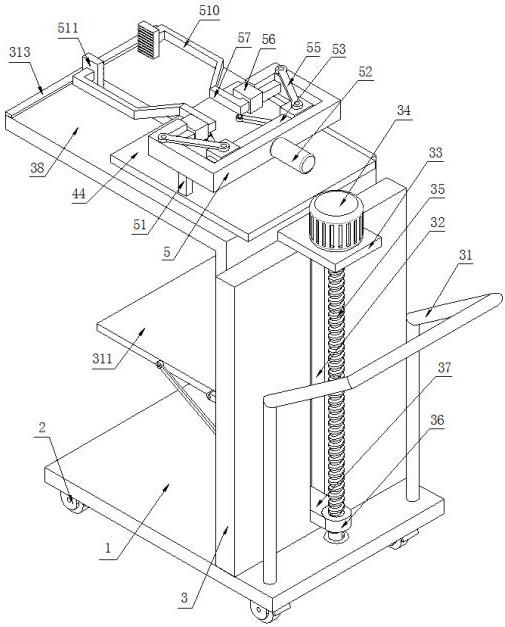
18.图1为一种基于高层物料仓储用存取设备及其控制方法的示意图;图2为一种基于高层物料仓储用存取设备及其控制方法的立体图;图3为一种基于高层物料仓储用存取设备及其控制方法的立体图;图4为一种基于高层物料仓储用存取设备及其控制方法的隔板结构爆炸图;图5为一种基于高层物料仓储用存取设备及其控制方法的安装架结构立体图;图6为一种基于高层物料仓储用存取设备及其控制方法的推动块结构立体图。
19.图中:1、移动底座;2、自锁万向轮;3、立板;31、推杆;32、条形限位孔;33、安装板;34、驱动电机;35、第一丝杆;36、螺纹环;37、连接杆;38、抬升板;39、限位槽;310、支座;311、隔板;312、支撑杆;313、防滑挡条;4、伺服电机;41、第二丝杆;42、螺纹套筒;43、限位块;44、移动板;5、安装架;51、固定块;52、伺服电动缸;53、推动块;54、移动套;55、第一摆杆;56、固定套;57、活动杆;58、固定柱;59、第二摆杆;510、扩张块;511、夹块;512、防滑凹槽。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
21.参照图1-6,一种基于高层物料仓储用存取设备及其控制方法,包括移动底座1,移
动底座1的下表面固定安装有呈矩形阵列分布的自锁万向轮2,移动底座1的上表面设置有抬升机构,抬升机构包括立板3,抬升机构对物料进行抬升和下降移动;移动底座1的上表面设置有平移机构,平移机构包括伺服电机4,且平移机构位于抬升机构一侧,平移机构对夹取的物料进行水平移动;移动底座1的上表面设置有夹取机构,夹取机构包括安装架5,且夹取机构位于抬升机构上方,夹取机构对存取的物料进行夹持固定。
22.进一步地,立板3的下表面与移动底座1的上表面固定连接,移动底座1的上表面固定连接有推杆31,推杆31起到便于管理人员带动移动底座1上的物料进行管理输送的作用,立板3的一侧表面开设有条形限位孔32,立板3的上表面固定连接有安装板33,安装板33的上表面固定安装有驱动电机34,驱动电机34的输出轴通过联轴器固定安装有第一丝杆35,驱动电机34可采用锥形转子电机,具有停机自锁功能,起到在停机时防止第一丝杆35受重力影响自转的作用。
23.进一步地,第一丝杆35的一端贯穿安装板33并通过轴承与移动底座1的上表面固定套接,第一丝杆35的外表面螺纹套接有螺纹环36,螺纹环36的外表面固定连接有连接杆37,连接杆37的一端贯穿条形限位孔32并延伸至立板3的另一侧表面,连接杆37的一端固定连接有抬升板38,第一丝杆35的旋转通过螺纹环36、连接杆37和条形限位孔32的配合,起到带动抬升板38进行升降移动的作用,抬升板38的一侧表面与立板3的另一侧表面接触。
24.进一步地,抬升板38的横截面呈l型形状,抬升板38的上表面开设有限位槽39,抬升板38的一侧表面开设有呈对称分布的定位插槽,抬升板38的一侧表面固定连接有呈对称分布的支座310,两个支座310相对的表面均通过销轴铰接有隔板311,隔板311的两侧表面通过销轴铰接有呈对称分布的支撑杆312,通过支撑杆312与定位插槽配合插接,使其对隔板311水平支撑,便于分层堆放小体积物料,从而可以对抬升板38内侧的空间进行合理分配,提高物料存储时的运输效率。
25.进一步地,支撑杆312的一端与定位插槽的内壁活动插接,抬升板38的上表面固定连接有防滑挡条313,防滑挡条313可采用线性阵列分布的防滑凸点分布在抬升板38上方,不但起到了防止物料在抬升板38升降时滑动,且不对物料存取移动时进行阻挡,伺服电机4的一侧表面与抬升板38的一侧表面固定安装,伺服电机4的输出轴通过联轴器固定安装有第二丝杆41,第二丝杆41的外表面螺纹套接有螺纹套筒42,螺纹套筒42的外表面固定连接有限位块43,限位块43的一端贯穿限位槽39并延伸至抬升板38的上表面,伺服电机4带动第二丝杆41进行旋转,通过限位块43与限位槽39的配合使其螺纹套筒42进行伸缩移动的作用。
26.进一步地,限位块43的上表面固定连接有移动板44,限位块43的移动起到带动移动板44进行平稳移动的作用,安装架5的下表面固定连接有呈对称分布的固定块51,固定块51的下表面与移动板44的上表面固定连接,安装架5的横截面呈c型形状,安装架5的一侧表面固定安装有伺服电动缸52,伺服电动缸52活塞杆的一端贯穿并延伸至安装架5的另一侧表面。
27.进一步地,伺服电动缸52活塞杆的一端固定连接有推动块53,推动块53的外表面活动套接有呈对称分布的移动套54,移动套54的上表面通过销轴铰接有第一摆杆55,伺服电动缸52活塞杆伸出带动推动块53进行移动,从而配合第一摆杆55带动移动套54相对移动
的作用,第一摆杆55的一端通过销轴与安装架5的上表面铰接,安装架5的两端表面固定连接有呈对称分布的固定套56。
28.进一步地,固定套56的内壁活动套接有活动杆57,活动杆57的横截面呈l型形状,活动杆57的下表面固定连接有固定柱58,固定柱58的一端外表面通过轴承固定套接有第二摆杆59,第二摆杆59的一端通过销轴与移动套54的下表面铰接,移动套54的相对移动通过第二摆杆59的配合带动固定套56内的活动杆57相对移动。
29.进一步地,活动杆57的一端固定连接有扩张块510,扩张块510的一端固定连接有夹块511,夹块511内可安装压力传感器,当压力传感器感应到夹块511对物料夹持的压力到达预设定值时停止夹紧,可有效的防止管理人员的误操导致物料损坏的作用,夹块511的一侧表面开设有呈线性阵列分布的防滑凹槽512,防滑凹槽512起到增大夹块511与物料接触时的摩擦力,从而防止在夹持过程中物料脱落的情况。
30.通过设置抬升机构、平移机构和夹取机构,从而达到了自动化对高层货架的物料进行拿取和存放,且便于对不同体积的物料进行输送管理,使得管理人员无需使用扶梯频繁上下攀爬,不仅降低了管理人员的劳动力,并且消除了攀爬产生安全隐患的效果。
31.通过设置隔板311、支座310、支撑杆312和定位插槽的配合使用,起到通过支撑杆312与定位插槽配合插接,使其对隔板311水平支撑,便于分层堆放小体积物料,从而可以对抬升板38内侧的空间进行合理分配,从而便于对不同体积的物料进行输送管理,提高物料存储时的运输效率的效果。
32.通过设置安装架5、推动块53、移动套54、第一摆杆55、第二摆杆59、固定套56、活动杆57扩张块510和夹块511的配合使用,起到在推动块53在移动时,第一摆杆55与第二摆杆59通过安装架5的限位配合,使其通过移动套54的相对移动带动活动杆57进行相对移动,从而使得活动杆57带动扩张块510上的夹块511对物料进行稳定夹持。
33.工作原理:步骤一,使用时,将物料放置在移动底座1上方,通过握住推杆31配合自锁万向轮2带动移动底座1上的物料进行运输管理,当物料架体积较大时,抓住隔板311一端向上翻转,同时将支撑杆312从定位插槽内壁取出后,向下翻转隔板311,使其呈竖直状态与抬升板38一侧接触,此时即可将大体积物料放置在移动底座1上进行输送;步骤二,当需要将物料放置在较高的货架上时,先将物料放置在抬升板38上方,使其物料位于两个夹块511的内侧后,启动驱动电机34带动第一丝杆35逆时针旋转,第一丝杆35的逆时针旋转通过螺纹环36带动连接杆37在条形限位孔32内上升移动,从而带动抬升板38进行上升移动,当抬升板38上升移动到与待放置物料货架水平时停止驱动电机34工作;步骤三,此时启动伺服电动缸52活塞杆进行伸出运动,伺服电动缸52活塞杆的伸出带动推动块53进行移动,推动块53的移动通过第一摆杆55的配合使其移动套54相对移动,移动套54的相对移动通过第二摆杆59与固定柱58的配合带动活动杆57相对移动,从而使得活动杆57通过扩张块510带动夹块511相对移动,并对物料进行夹持固定;步骤四,此时启动伺服电机4带动第二丝杆41逆时针旋转,使其螺纹套筒42通过限位块43与限位槽39的配合进行水平伸出移动,通过限位块43带动移动板44上的安装架5移动,从而带动夹块511夹持的物料进行移动,使其夹块511带动物料伸入货架内部后,停止伺服电机4工作,同时启动伺服电动缸52活塞杆进行回缩运动,此时推动块53的移动通过第一
摆杆55的配合使其移动套54相背移动,移动套54的相背移动通过第二摆杆59与固定柱58的配合带动活动杆57相背移动,从而使得活动杆57通过扩张块510带动夹块511相背移动,夹块511与物料表面脱离取消夹持,此时物料位于货架上方;步骤五,此时启动伺服电机4带动第二丝杆41顺时针旋转,使其螺纹套筒42通过限位块43与限位槽39的配合进行水平收缩复位移动,从而带动移动板44上的安装架5复位移动,最后启动驱动电机34带动第一丝杆35顺时针旋转,使其通过螺纹环36与连接杆37的配合带动抬升板38下降复位,当需要对较高货架上的物料进行拿取时,同理操作即可。
34.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。