1.本发明涉及具有怠速停止功能的车辆控制装置,该怠速停止功能是指,当满足规定的停止条件时使作为本车辆的驱动源的发动机停止。
背景技术:
2.以往,以节约燃料、降低电磁干扰、降低振动噪音等为目标而已知具有怠速停止功能的车辆控制装置,该怠速停止功能是指,当满足规定的停止条件(例如,车速为零且制动开启)时使作为本车辆的驱动源的发动机停止。此外,在以下说明中,有时将“怠速停止”简称为“is”。
3.作为上述车辆控制装置的一例,在专利文献1中公开了一种车辆控制装置的发明,该车辆控制装置具有:is控制部,其根据规定的停止条件的成立而使发动机停止,在发动机停止之后根据规定的再起动条件的成立而进行发动机再起动控制;陡坡缓降控制部,其在下坡路的行驶中无论驾驶员的制动操作都以不超过目标车速vstg的方式进行车速控制;和陡坡缓降控制设定部,其设定陡坡缓降控制部的工作状态和非工作状态。此外,在以下说明中,有时将“陡坡缓降”简称为“hdc”。
4.在专利文献1的车辆控制装置中,有可能会发生与is控制相关的发动机再起动要求和与hdc控制相关的车速控制(减速控制)要求在时间上重叠产生的情景。在此,与is控制相关的发动机再起动要求、和与hdc控制相关的减速控制要求均需要响应各自的要求而要求比较大的电力。因此,在与is控制相关的发动机再起动要求和与hdc控制相关的减速控制要求在时间上重叠产生的情景中,担心无法响应某一方的要求,而使乘员感到不适感。
5.例如,若在hdc控制中is控制工作而使发动机停止,则下坡路的过程中的由hdc控制实现的下坡性能无法充分发挥。
6.因此,在专利文献1的车辆控制装置中,is控制部采用了如下构成:在hdc控制被设定为工作状态的情况下禁止发动机的停止。
7.根据专利文献1的车辆控制装置,能够谋求同时实现is控制以及hdc控制。
8.现有技术文献
9.专利文献
10.专利文献1:日本特开2020-012434报
技术实现要素:
11.但是,在专利文献1的车辆控制装置中,在与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情景中,排他性地执行is控制以及hdc控制中的某一方,由此,假设在响应了与hdc控制相关的减速控制要求的情况下,无法响应与is控制相关的发动机再起动要求。该结果为,对于专利文献1的车辆控制装置,担心会使乘员感到不适感。
12.本发明是鉴于上述实际情况作出的,其目的为,提供一种即使在与is控制相关的
发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情景下也能够实现不会使乘员感到不适感的顺畅的车辆控制的车辆控制装置。
13.为了实现上述目的,本发明的实施方式的车辆控制装置最主要的特征在于,具有:发动机控制部,其根据规定的停止条件的满足而进行使作为本车辆的驱动源的发动机的驱动停止的怠速停止控制,并且根据规定的再起动条件的满足而进行发动机再起动控制;陡坡缓降控制部,其在本车辆行驶在下坡路的过程中且产生了与陡坡缓降控制相关的减速控制要求的情况下,不论由本车辆的驾驶员进行的制动操作如何,都基于预先设定的目标车速进行减速控制;和信息获取部,其获取包括与发动机再起动控制相关的开始以及结束在内的进程状况的信息,在与怠速停止控制相关的发动机再起动要求以及与陡坡缓降控制相关的减速控制要求在时间上重叠产生的情况下,所述发动机控制部优先进行发动机再起动控制,并且所述陡坡缓降控制部基于获取的包括与发动机再起动控制相关的开始以及结束在内的所述进程状况而允许基于所述目标车速进行的减速控制的执行。
14.发明效果
15.根据本发明的实施方式的车辆控制装置,即使在与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情景下,也能够实现不会使乘员感到不适感的顺畅的车辆控制。
附图说明
16.图1是表示本发明实施方式的车辆控制装置的概要的构成框图。
17.图2是用于本发明的实施方式的车辆控制装置的动作说明的流程图。
18.图3a是用于发动机从发动机再起动控制的开始时点在规定时间以内转移至爆发状态的情况的车辆控制装置的动作说明的时序图。
19.图3b是用于发动机从发动机再起动控制的开始时点在规定时间以内没有转移至爆发状态的情况的车辆控制装置的动作说明的时序图。
20.图4是用于本发明的实施方式的变形例的车辆控制装置的动作说明的流程图。
21.附图标记说明
22.11
ꢀꢀ
车辆控制装置
23.41
ꢀꢀ
发动机
24.51
ꢀꢀ
hdc-ecu(陡坡缓降控制部)
25.53
ꢀꢀ
eng-ecu
26.57
ꢀꢀ
vsa-ecu(陡坡缓降控制部)
27.61
ꢀꢀ
信息获取部
28.63
ꢀꢀ
发动机控制部(判断部)
具体实施方式
29.以下,适当参照附图来详细说明本发明的实施方式的车辆控制装置。
30.此外,在以下所示的图中,在具有共通功能的部件间或在具有相互对应功能的部件间,原则上标注共通的参照附图标记。另外,有时为了便于说明,部件的尺寸以及形状会变形或夸张来示意表示。〔本发明的实施方式的车辆控制装置11的概要〕
31.首先,参照图1来说明本发明的实施方式的车辆控制装置11的概要。图1是表示本发明的实施方式的车辆控制装置11的概要的构成框图。
32.本发明的实施方式的车辆控制装置11具有如下功能:即使与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情景下,也能够实现不会使乘员感到不适感的顺畅的车辆控制。
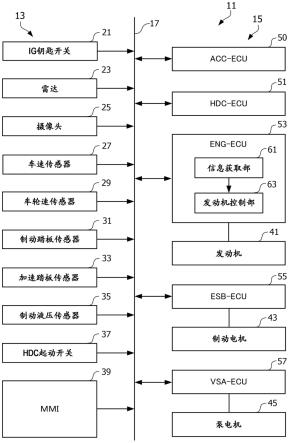
33.为了实现上述功能,如图1所示,本发明的实施方式的车辆控制装置11构成为,例如经由can(controller area network)等通信介质17而将输入类要素13以及输出类要素15之间以能够相互进行数据通信的方式连接。
34.如图1所示,输入类要素13的构成包括点火钥匙开关(ig钥匙开关)21、雷达23、摄像头25、车速传感器27、车轮速传感器29、制动踏板传感器31、加速踏板传感器33、制动液压传感器35、hdc起动开关37、以及mmi(man-machine interface)39。
35.另一方面,如图1所示,输出类要素15的构成包括acc(adaptive cruise control)-ecu50、hdc(hill descent control)-ecu51、eng-ecu53、esb(electric servo brake)-ecu55以及vsa(vehicle stability assist;其中vsa为注册商标)-ecu57。
36.ig钥匙开关21是在向搭载于车辆的电装部件的各部经由未图示的车载蓄电池供给电源时操作的开关。若ig钥匙开关21进行开启操作,则向acc-ecu50、hdc-ecu51、eng-ecu53、esb-ecu55以及vsa-ecu57分别供给电源,这些各ecu50、51、53、55、57分别起动。
37.雷达23具有如下功能:向包括在本车辆前方行驶的其他车辆的物标照射雷达波,并且接收由物标反射的雷达波,由此获取包括离物标的距离和物标的方位在内的物标的分布信息。
38.作为雷达23,例如能够适当使用激光雷达、毫米波雷达、厘米波雷达、超声波雷达等。雷达23设于本车辆的前格栅里部等。由雷达23获得的物标的分布信息经由通信介质17向acc-ecu50发送。
39.摄像头25具有向本车辆前方的斜下方倾斜的光轴,并具有拍摄本车辆的进行方向上的图像的功能。作为摄像头25,例如能够适当使用cmos(complementary metal oxide semiconductor)摄像头和ccd(charge coupled device)摄像头等。摄像头25设在本车辆的挡风玻璃中央上部等。由摄像头25拍摄的本车辆的进行方向图像信息作为例如通过ntsc(national television standards committee)等隔行扫描方式生成的图像信号而经由通信介质17向acc-ecu50发送。
40.车速传感器27具有检测车辆的行驶速度(车速)vs的功能。由车速传感器27检测到的车速vs的信息经由通信介质17向esb-ecu55等发送。
41.车轮速传感器29具有分别检测本车辆上设置的各车轮(未图示)各自的旋转速度(车轮速)的功能。由车轮速传感器29分别检测到的各车轮各自的车轮速的信息经由通信介质17向vsa-ecu57发送。
42.制动踏板传感器31具有检测由驾驶员实施的制动踏板(未图示)的操作量、以及扭矩的功能。由制动踏板传感器31检测到的制动踏板的操作量以及扭矩的信息经由通信介质17向esb-ecu55等发送。
43.加速踏板传感器33具有检测由驾驶员实施的加速踏板(未图示)的操作量的功能。由加速踏板传感器33检测到的加速踏板的操作量的信息经由通信介质17向vsa-ecu57等发
送。
44.制动液压传感器35具有检测制动液压系统中的vsa装置(车辆举动稳定化装置;未图示)的供液路径中的制动液压的功能。由制动液压传感器35检测到的vsa装置的供给液路径中的液压信息经由通信介质17向esb-ecu55等发送。
45.hdc起动开关37是当将hdc控制设定为开启状态(有效化)时由乘员操作的开关。hdc起动开关37例如设在驾驶席的周边部位。hdc起动开关37受理乘员将hdc控制设定为开启状态或设定为关闭状态的设定信息,并且将受理的设定信息向车辆控制装置11输出。
46.mmi(man-machine interface)39例如在对自适应巡航控制(acc)功能的设定信息进行操作输入时所用。由mmi39操作输入的acc功能的设定信息经由通信介质17向acc-ecu50等发送。
47.接着说明图1所示的输出类要素15。
48.属于输出类要素15的acc-ecu50由具有cpu(central processing unit)、rom(read only memory)、ram(random access memory)等的微计算机构成。该微计算机如下地工作:读取rom内存储的程序和数据并对其执行,进行包括acc-ecu50所具有的各种信息的获取功能、acc控制功能、lsf控制功能在内的各种功能的执行控制。
49.acc-ecu50获取由雷达23得到的物标的分布信息、由摄像头25拍摄的本车辆的进行方向图像信息、由车速传感器27检测到的车速vs的信息、以及经由属于mmi(man-machine interface)39的acc操作开关81输入的acc功能的设定信息在内的各种信息。
50.另外,acc-ecu50在本车辆的车速vs维持在设定车速的范围内的状态下,以在将离先行车辆的车间距离保持为设定车间距离的同时无需加速踏板和制动踏板的操作的方式进行包括加速控制以及减速控制的追随控制(acc控制)。
51.而且,acc-ecu50在例如高速道路上的拥堵行驶时等的本车辆的车速vs以低于设定速度(例如80km/h)的低速(例如30km/h)行驶时,以将离先行车辆的车间距离保持为设定车间距离的方式无需加速踏板和制动踏板的操作地,进行包括加速控制以及减速控制的追随控制(lsf控制)。
52.hdc-ecu51导出本车辆所存在的场所的坡度角度。若更具体来说,hdc-ecu51例如基于从由加速度传感器(未图示)输出的加速度减去对由车速传感器27检测到的车速vs进行微分得到的进行方向的加速度求得的静止状态的加速度来导出路面的坡度角度。
53.另外,hdc-ecu51在本车辆行驶于下坡路的情况下,以抑制因向下坡度产生的加速度的方式进行减速控制。将这样的减速控制称为hdc(hill descent control)控制。
54.hdc-ecu51在本车辆行驶在下坡路的过程中且hdc起动开关37设定为开启状态的情况下,将hdc控制的减速控制要求向vsa-ecu57发送。由此,hdc-ecu51与vsa-ecu57联动地,不论由本车辆的驾驶员进行的制动操作如何,都基于预先设定的目标车速vstg来进行减速控制。
55.此外,hdc-ecu51相当于本发明的“陡坡缓降控制部”的一部分。另外,hdc起动开关37设定为开启状态的情况相当于本发明的“产生了与陡坡缓降(hdc)控制相关的减速控制要求的情况”。
56.eng-ecu53具有信息获取部61以及发动机控制部63。
57.eng-ecu53由具有cpu、rom、ram等的微计算机构成。该微计算机读取rom内储存的
程序和数据并执行,以进行eng-ecu53所具有的包括信息获取功能以及发动机控制功能在内的各种功能的执行控制的方式工作。
58.信息获取部61具有获取包括加速踏板的踏入量、制动踏板的踏入量、本车辆的车速vs、发动机旋转速度ne、车载蓄电池的电源电压vtg、包括与发动机再起动控制相关的开始以及结束的进程状况在内的各种信息的功能。
59.发动机控制部63具有根据加速踏板的踏入量等来控制发动机41的驱动的功能。若具体说,发动机控制部63控制调整发动机41的吸气量的节气阀(未图示)、喷射燃料气体的喷射器(未图示)、和进行燃料点燃的点火栓(未图示)等。
60.发动机控制部63具有当满足停止条件时使作为本车辆的驱动源的发动机41停止的怠速停止功能。在此,作为“停止条件”,例如采用本车辆的车速vs处于低车速区域(车速vs<车速阈值vsth)、制动踏板被踏入、且加速踏板没有被踏入的这些条件即可。
61.发动机控制部63在满足了成为进行发动机41停止控制时的触发点的所述停止条件的情况下,作为原则,视为存在使发动机41的驱动停止的驾驶意图而进行使发动机41的驱动停止的控制。
62.另外,发动机控制部63具有当满足规定的再起动条件时视为产生了发动机再起动要求而使发动机41再起动的功能。在此,“再起动条件”例如采用加速踏板被踏入的条件、和脚从制动踏板离开的条件即可。
63.而且,发动机控制部63具有检测伴随发动机再起动产生的车载蓄电池(电源)的电压变动,并且判断电源电压是否从降低状态恢复为正常状态的功能。
64.另外,发动机控制部63具有判断从发动机再起动控制的开始时点起的经过时间是否超过规定时间的功能。
65.而且,发动机控制部63监视电源的电压变动,并且在电源的电压值从规定的电压阈值以下增大而超过该电压阈值的情况下,做出该电源的电压从降低状态恢复为正常状态的意思的判断。
66.发动机控制部63相当于本发明的“判断部”。
67.esb-ecu55由具有cpu、rom、ram等的微计算机构成。该微计算机读取rom内存储的程序和数据并将其执行,以进行esb-ecu55所具有的包括制动力控制功能的各种功能的执行控制的方式工作。
68.esb-ecu55具有如下功能:根据由主缸(未图示)产生的制动液压,通过制动电机43的驱动而使电动缸装置(例如参照日本特开2015-110378号公报:未图示)工作,由此产生制动液压(二次液压)。
69.vsa-ecu57由具有cpu、rom、ram等的微计算机构成。该微计算机读取rom内存储的程序和数据并将其执行,以进行包括vsa-ecu57所具有的基于acc工作的制动控制功能、车辆姿势稳定化功能在内的各种功能的执行控制的方式工作。
70.vsa-ecu57例如接受来自hdc-ecu51的减速控制指令,使用泵电机45来驱动加压泵(未图示),由此将四个车轮的制动力控制为符合各车轮各自的目标液压的制动力。
71.总之,vsa-ecu57在产生了与hdc有关的减速控制要求的情况下,与hdc-ecu51联动,无论由本车辆的驾驶员进行的制动操作如何,都基于预先设定的目标车速vstg来进行减速控制。
72.vsa-ecu57与hdc-ecu51一同构成了本发明的“陡坡缓降控制部”。vsa-ecu57承担了本发明的“陡坡缓降控制部”所具有的功能中的“进行基于目标车速vstg的减速控制”的功能。
73.〔本发明的实施方式的车辆控制装置11的动作〕
74.接着,参照图2来说明本发明的实施方式的车辆控制装置11的动作。图2是用于本发明的实施方式的车辆控制装置11的动作说明的流程图。
75.作为前提,在图2所示的步骤s11中,对于本发明的实施方式的车辆控制装置11,在时间上重叠产生了与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求。另外,假设本车辆存在于下坡路上。假设自动变速机(未图示)的换挡位置设定在前进挡位。
76.在图2所示的步骤s11中,属于eng-ecu53的发动机控制部63按照与is控制相关的发动机再起动要求而开始发动机41的再起动控制。于是,车载蓄电池的电源电压vtg向起动电机(未图示)供给,由此发动机41的曲轴(未图示)转动。
77.此外,在步骤s11的时点,与hdc控制相关的减速控制要求被保留。
78.步骤s12中,车辆控制装置11将计时器(未图示)的累计值cnt初始设定为(0)。
79.步骤s13中,车辆控制装置11对计时器的累计值cnt进行增加(cnt=cnt 1)。
80.步骤s14中,属于eng-ecu53的发动机控制部63进行由信息获取部61获取的发动机旋转速度ne是否超过与发动机41的爆发状态对应的爆发阈值neth的判断。在此,发动机41处于爆发状态意味着发动机41无起动电机辅助地自律驱动的状态。
81.在步骤s14的判断的结果做出了发动机旋转速度ne没有超过爆发阈值neth的意思的判断的情况下(步骤s14为否),车辆控制装置11使处理的流程向接着的步骤s15前进。另一方面,在步骤s14的判断的结果做出了发动机旋转速度ne超过爆发阈值neth的意思的判断的情况下(步骤s14为是),车辆控制装置11使处理的流程跳至步骤s16。
82.步骤s15中,车辆控制装置11进行计时器的累计值cnt是否超过时间阈值cntth的判断,该时间阈值cntth是与设想为若在通常则发动机41会转移至爆发状态的爆发时间对应的阈值。
83.在步骤s15的判断的结果做出了计时器的累计值cnt没有超过时间阈值cntth的意思的判断的情况下(步骤s15为否),车辆控制装置11使处理的流程返回步骤s13,依次进行以后的处理。
84.另一方面,在步骤s15的判断的结果做出了计时器的累计值cnt超过时间阈值cntth的意思的判断的情况下(步骤s15为是),车辆控制装置11使处理的流程向接着的步骤s16前进。
85.步骤s16中,属于eng-ecu53的发动机控制部63允许hdc控制的执行。
86.总之,本发明的实施方式的车辆控制装置11中,发动机控制部63在发动机41转移至爆发状态或从发动机41的再起动控制开始后的时点经过了设定为若在通常则发动机41会转移至爆发状态的爆发时间的情况下,解除与hdc控制相关的减速控制要求的保留而允许hdc控制的执行。
87.〔本发明的实施方式的车辆控制装置11的时序动作〕
88.接着,参照图3a、图3b来说明本发明的实施方式的车辆控制装置11的时序动作。
89.图3a是用于发动机41从发动机再起动控制的开始时点在规定时间以内转移至爆发状态的情况的车辆控制装置11的动作说明的时序图。图3b是用于发动机41从发动机再起动控制的开始时点在规定时间以内没有转移至爆发状态的情况的车辆控制装置11的动作说明的时序图。
90.〔发动机41在规定时间以内转移至爆发状态的情况〕
91.首先,参照图3a来说明发动机41从发动机再起动控制的开始时点在规定时间以内转移至爆发状态的情况的车辆控制装置11的时序动作。作为前提,假设本车辆存在于下坡路。另外,假设自动变速机的换挡位置设定在前进挡位。
92.在时刻t0~t1紧前,由有无制动踏板踏入操作所表示的制动操作状态为开启状态(有制动踏板踏入操作)。发动机再起动状态为关闭状态(无发动机再起动)。发动机旋转速度ne为零(发动机41停止)。车载蓄电池的电源电压vtg呈轻荷载电位。计时器的累计值cnt为(0)。hdc控制状态为待机状态(不允许hdc控制的执行)。卡钳压力呈与制动操作相符的制动力。本车辆的车速vs为零(停车状态)。
93.时刻t1中,制动操作状态从开启状态转移至关闭状态(无制动踏板踏入操作)。伴随该情况,发动机再起动状态从关闭状态(无发动机再起动)转移至开启状态(有发动机再起动)。总之,时刻t1中,开始了发动机再起动控制。
94.在该时刻t1中,发动机旋转速度ne仍然为零(发动机41停止)。车载蓄电池的电源电压vtg仍然呈轻荷载电位。计时器的累计值cnt仍然为(0)。hdc控制状态从待机状态转移至半激活状态(允许执行一部分hdc控制:由于基于泵电机45进行的制动液压的保持和减压不需要大电力,所以为允许。然而,由于基于泵电机45进行的制动液压的加压需要大电力,所以为不允许。)。卡钳压力从与制动操作相符的制动力大幅急减。本车辆的车速vs仍然为零(停车状态)。
95.在时刻t1~t2紧前,制动操作状态维持关闭状态(无制动踏板踏入操作)。发动机再起动状态维持开启状态(有发动机再起动)。发动机旋转速度ne呈与基于起动电机实现的曲轴的旋转力相符的旋转速度特性。车载蓄电池的电源电压vtg呈比轻荷载电位低的、因起动电机的工作而产生的特性的重荷载电位。计时器的累计值cnt呈根据时间的经过而以线形渐增的值(然而cnt<cntth)。hdc控制状态维持半激活状态。卡钳压力保持了从与制动操作相符的制动力大幅急减的值(以基于泵电机45进行的制动液压的保持为起因的制动力)。本车辆的车速vs呈与下坡路的坡度角度相符的加速特性。
96.时刻t2中,发动机旋转速度ne超过与发动机41的爆发状态对应的爆发阈值neth。伴随该情况,发动机再起动状态从开启状态(有发动机再起动)转移至关闭状态(无发动机再起动)。hdc控制状态从半激活状态转移至激活状态(允许执行hdc控制:允许基于泵电机45进行的制动液压的全部加压、保持、减压。)。
97.该时刻t2中,制动操作状态维持关闭状态(无制动踏板踏入操作)。车载蓄电池的电源电压vtg呈能够进行相对于起动电机、泵电机45那样的重荷载稳定的电力供给的指标、即电压阈值vtgth附近的电压值。计时器的累计值cnt呈根据时间的经过以线形渐增的值(然而,cnt<cntth)。卡钳压力仍然保持从与制动操作相符的制动力大幅急减的值。本车辆的车速vs呈稍微超过目标车速vstg的值。
98.在时刻t2以后,制动操作状态维持关闭状态(无制动踏板踏入操作)。发动机再起
动状态维持关闭状态(无发动机再起动)。发动机旋转速度ne呈与基于加速踏板的加速操作相符的速度值(ne>neth)。车载蓄电池的电源电压vtg呈轻荷载电位(vtg>vtgth)。计时器的累计值cnt呈根据时间的经过而以线形渐增的值。hdc控制状态维持激活状态。表示制动力的卡钳压力呈与hdc控制的减速控制相符的值。本车辆的车速vs呈收敛于目标车速vstg附近的值。
99.〔发动机41在规定时间以内没有转移至爆发状态的情况〕
100.接着,参照图3b来说明发动机41从发动机再起动控制的开始时点在规定时间以内没有转移至爆发状态的情况的车辆控制装置11的时序动作。作为前提,假设本车辆存在于下坡路。另外,假设自动变速机的换挡位置设定在前进挡位。
101.在时刻t0~t11紧前,制动操作状态为开启状态(有制动踏板踏入操作)。发动机再起动状态为关闭状态(无发动机再起动)。发动机旋转速度ne为零(发动机41停止)。车载蓄电池的电源电压vtg呈轻荷载电位。计时器的累计值cnt为(0)。hdc控制状态为待机状态(不允许hdc控制的执行)。卡钳压力呈与制动操作相符的制动力。本车辆的车速vs为零(停车状态)。
102.时刻t11中,制动操作状态从开启状态转移至关闭状态(无制动踏板踏入操作)。伴随该情况,发动机再起动状态从关闭状态(无发动机再起动)转移至开启状态(有发动机再起动)。总之,时刻t11中,开始了发动机再起动控制。
103.该时刻t11中,发动机旋转速度ne仍然为零(发动机41停止)。车载蓄电池的电源电压vtg仍然呈轻荷载电位。计时器的累计值cnt仍然为(0)。hdc控制状态从待机状态转移至半激活状态。卡钳压力从与制动操作相符的制动力大幅急减。本车辆的车速vs仍然为零(停车状态)。
104.在时刻t11~t12紧前,制动操作状态维持关闭状态(无制动踏板踏入操作)。发动机再起动状态维持开启状态(有发动机再起动)。发动机旋转速度ne呈与基于起动电机实现的曲轴的旋转力相符的旋转速度特性。车载蓄电池的电源电压vtg呈比轻荷载电位低的、以起动电机的工作为起因的特性的重荷载电位。计时器的累计值cnt呈根据时间的经过而以线形渐增的值(然而,cnt<cntth)。hdc控制状态维持半激活状态。卡钳压力保持了从与制动操作相符的制动力大幅急减的值。本车辆的车速vs呈与下坡路的坡度角度相符的加速特性。
105.时刻t12中,计时器的累计值cnt超过了与设想为若在通常则发动机41会转移至爆发状态的爆发时间对应的时间阈值cntth(cnt>cntth)。
106.此外,该时刻t12中,车载蓄电池的电源电压vtg也正好超过了能够进行相对于起动电机、泵电机45那样的重荷载稳定的电力供给的指标、即电压阈值vtgth。
107.然而,该时刻t12中,发动机旋转速度ne因起动电机不正常等某些理由,未达到与发动机41的爆发状态对应的爆发阈值neth。
108.该情况下,在该时刻t12中允许hdc控制的执行。也就是说,hdc控制状态从半激活状态转移至激活状态。总之,在发动机41从与发动机再起动控制相关的开始时点(时刻t11)在规定时间以内没有转移至爆发状态的情况下,待到计时器的累计值cnt超过上述时间阈值cntth(cnt>cntth)的时点(时刻t12),允许hdc控制的执行。
109.该时刻t12中,制动操作状态维持关闭状态(无制动踏板踏入操作)。发动机再起动
状态维持开启状态(有发动机再起动)。hdc控制状态从半激活状态转移至激活状态。卡钳压力仍然保持从与制动操作相符的制动力大幅急减的值。由于没有进行与hdc控制相关的减速控制的执行,所以本车辆的车速vs呈大幅超过目标车速vstg的值。
110.时刻t12以后,制动操作状态维持关闭状态(无制动踏板踏入操作)。发动机再起动状态维持开启状态(有发动机再起动)。发动机旋转速度ne呈与基于起动电机实现的曲轴的旋转力相符的旋转速度特性(然而,ne<neth)。车载蓄电池的电源电压vtg维持所述电压阈值vtgth附近的电压值。计时器的累计值cnt呈根据时间的经过而以线形渐增的值。hdc控制状态维持激活状态。卡钳压力呈与hdc控制的减速控制相符的值。本车辆的车速vs呈逐渐收敛于目标车速vstg附近的特性。
111.〔本发明的变形例的车辆控制装置11的动作〕
112.接着,参照图4来说明本发明的变形例的车辆控制装置11的动作。图4是用于本发明的变形例的车辆控制装置11的动作说明的流程图。
113.作为前提,在图4所示的步骤s21中,对于本发明的变形例的车辆控制装置11,在时间上重叠产生了与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求。另外,假设本车辆存在于下坡路。假设自动变速机的换挡位置设定在前进挡位。
114.在图4所示的步骤s21中,属于eng-ecu53的发动机控制部63依照与is控制相关的发动机再起动要求而开始发动机41的再起动控制。于是,车载蓄电池的电源电压vtg向起动电机(未图示)供给,由此发动机41的曲轴(未图示)转动。
115.此外,在步骤s21的时点,与hdc控制相关的减速控制要求被保留。
116.步骤s22中,属于eng-ecu53的信息获取部61获取作为重荷载的起动电机与端子间连接的状态下的车载蓄电池的电源电压vtg。
117.步骤s24中,属于eng-ecu53的发动机控制部63进行由信息获取部61获取的发动机旋转速度ne是否超过与发动机41的爆发状态对应的爆发阈值neth的判断。
118.在步骤s24的判断的结果做出了发动机旋转速度ne没有超过爆发阈值neth的意思的判断的情况下(步骤s24为否),变形例的车辆控制装置11使处理的流程向接着的步骤s25前进。另一方面,在步骤s24的判断的结果做出了发动机旋转速度ne超过了爆发阈值neth的意思的判断的情况(步骤s24为是),变形例的车辆控制装置11使处理的流程跳至步骤s26。
119.步骤s25中,变形例的车辆控制装置11进行车载蓄电池的电源电压vtg是否超过能够进行相对于起动电机、泵电机45那样的重荷载稳定的电力供给的指标、即电压阈值vtgth的判断。
120.在步骤s25的判断的结果做出了车载蓄电池的电源电压vtg没有超过电压阈值vtgth的意思的判断的情况下(步骤s25为否),变形例的车辆控制装置11使处理的流程返回步骤s22,依次执行之后的处理。
121.另一方面,在步骤s25的判断的结果做出了车载蓄电池的电源电压vtg超过了电压阈值vtgth的意思的判断的情况下(步骤s25为是),变形例的车辆控制装置11使处理的流程向接着的步骤s26前进。
122.步骤s26中,属于eng-ecu53的发动机控制部63允许hdc控制的执行。
123.总之,变形例的车辆控制装置11中,发动机控制部63在发动机41转移至爆发状态,或车载蓄电池的电源电压vtg超过了能够进行相对于起动电机、泵电机45那样的重荷载稳
定的电力供给的指标、即电压阈值vtgth的情况下,解除与hdc控制相关的减速控制要求的保留,允许hdc控制的执行。
124.〔本发明的实施方式的车辆控制装置11起到的作用效果〕
125.接着,说明本发明实施方式的车辆控制装置11起到的作用效果。
126.基于第1观点的车辆控制装置11具有:发动机控制部63,其根据规定的停止条件的满足而进行使作为本车辆的驱动源的发动机41的驱动停止的怠速停止控制(is控制),并且根据规定的再起动条件的满足而进行发动机再起动控制;陡坡缓降控制部(hdc-ecu51、vsa-ecu57),其在本车辆行驶在下坡路的过程中且产生了与陡坡缓降控制(hdc控制)相关的减速控制要求的情况下,不论由本车辆的驾驶员进行的制动操作如何,都基于预先设定的目标车速vstg进行减速控制;和信息获取部61,其获取包括与发动机再起动控制相关的开始以及结束在内的进程状况的信息。
127.并采用如下构成:在与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情况下,发动机控制部63优先进行发动机再起动控制,并且陡坡缓降控制部(hdc-ecu51、vsa-ecu57)基于获取的包括与发动机再起动控制相关的开始以及结束在内的所述进程状况而允许基于目标车速vstg进行的减速控制的执行。
128.作为前提,与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求均为了响应其要求而要求比较大的电力。因此,在作为响应与is控制相关的发动机再起动要求时所用的电源以及响应与hdc控制相关的减速控制要求时所用的电源而共用了本车辆上搭载的一个电源的情况下,且在与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情况下,担心会发生电源容量的不足而无法同时响应上述双方的要求,而导致乘员感到不适感。
129.针对这点,在基于第1观点的车辆控制装置11中,在与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情况下,发动机控制部63优先进行发动机再起动控制,由此能够迅速响应发动机再起动要求。由此,能够实现不会使乘员感到不适感的顺畅的车辆控制。此外,在将本车辆设为能够行驶的状态的点中,基于下坡路上的与基于目标车速vstg进行的速度控制相比更应该优先的事项的设计思想,优先hdc控制来进行发动机再起动控制,由此将发动机设为运转状态。
130.另一方面,陡坡缓降控制部基于所述获取的包括与发动机再起动控制相关的开始以及结束的进程状况,例如待到与发动机再起动控制相关的开始以及结束的完成而允许基于目标车速vstg的减速控制的执行,由此在发动机再起动后,能够迅速响应与hdc控制相关的减速控制要求。由此,能够将以可能会在同时执行is控制以及hdc控制的情况下发生的电源容量不足为起因的无法预期的hdc控制不良避免于未然。
131.另外,在与hdc控制相关的基于目标车速vstg的减速控制中,能够提高关于目标车速vstg的设定的自由度。这是因为在is控制以及hdc控制的冲突时尽可能抑制hdc控制被执行的事态的目的下,不需要采取如将目标车速vstg设定得高那样的应对。
132.根据基于第1观点的车辆控制装置11,即使在与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情景中,也能够实现不会使乘员感到不适感的顺畅的车辆控制。
133.另外,能够将以可能会在同时执行is控制以及hdc控制的情况下发生的电源容量
不足为起因的无法预期的hdc控制不良避免于未然。
134.另外,在与hdc控制相关的基于目标车速vstg的减速控制中,能够提高关于目标车速vstg的设定的自由度。该结果为,能够提高行驶于陡急的下坡路时的商品性。
135.而且,由于能够抑制电源应该对应的荷载电力的冲突,所以还能够期待缩小电源容量(谋求电源轻量化)的次要效果。
136.另外,基于第2观点的车辆控制装置11在基于第1观点的车辆控制装置11中还可以采用如下构成:在发动机再起动从发动机再起动的开始时点在规定时间以内没有结束的情况下,陡坡缓降控制部允许基于目标车速vstg进行的减速控制的执行。
137.在基于第2观点的车辆控制装置11中,在发动机再起动从发动机再起动的开始时点在规定时间以内没有结束的情况下,陡坡缓降控制部允许基于目标车速vstg进行的减速控制的执行。即使在假设因起动电机不良等的某些理由而导致发动机再起动没有顺畅执行的情况下,从发动机再起动的开始时点待到规定时间的经过,也会允许基于目标车速vstg进行的减速控制的执行。
138.根据基于第2观点的车辆控制装置11,在基于第1观点的车辆控制装置11的效果的基础上,即使在因某些理由而导致发动机再起动没有顺畅执行的情况下,从发动机再起动的开始时点待到规定时间的经过,也能够适时且准确地执行基于目标车速vstg的减速控制。
139.另外,基于第3观点的车辆控制装置11具有:发动机控制部63,其根据规定的停止条件的满足而进行使作为本车辆的驱动源的发动机41的驱动停止的怠速停止控制(is控制),并且根据规定的再起动条件的满足而进行发动机再起动控制;陡坡缓降控制部(hdc-ecu51、vsa-ecu57),其在本车辆行驶在下坡路的过程中且产生了与陡坡缓降控制(hdc控制)相关的减速控制要求的情况下,不论由本车辆的驾驶员进行的制动操作如何,都基于预先设定的目标车速vstg进行减速控制;和信息获取部61,其获取包括与发动机再起动控制相关的开始以及结束在内的进程状况的信息。
140.执行发动机再起动控制时所用的电源、和执行减速控制时所用的电源共用搭载于本车辆的一个电源。
141.还具有发动机控制部63(判断部),其监视伴随发动机再起动出现的所述一个电源的电压变动,并且判断该一个电源的电压是否从降低状态恢复为正常状态。
142.也可以采用如下构成:在与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情况下,发动机控制部63优先进行发动机再起动控制,并且陡坡缓降控制部在由发动机控制部63(判断部)做出了所述一个电源的电压从降低状态恢复为正常状态的意思的判断的情况下,允许基于目标车速vstg进行的减速控制的执行。
143.在基于第3观点的车辆控制装置11中,与基于第1观点的车辆控制装置11同样地,在与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情况下,发动机控制部63优先进行发动机再起动控制,由此能够迅速响应发动机再起动要求。由此,能够实现不会使乘员感到不适感的顺畅的车辆控制。
144.另一方面,陡坡缓降控制部在由发动机控制部63(判断部)做出了所述一个电源的电压从降低状态恢复为正常状态的意思的判断的情况下,允许基于目标车速vstg进行的减
速控制的执行,由此待到该一个电源的电压恢复为正常状态,能够迅速响应与hdc控制相关的减速控制要求。
145.由此,能够将以可能会在同时执行is控制以及hdc控制的情况下发生的电源容量不足为起因的无法预期的hdc控制不良避免于未然。
146.另外,在与hdc控制相关的基于目标车速vstg的减速控制中,与基于第1观点的车辆控制装置11同样地,能够提高关于目标车速vstg的设定的自由度。这是因为在is控制以及hdc控制的冲突时尽可能抑制hdc控制被执行的事态的目的下,不需要采取如将目标车速vstg设定得高那样的应对。
147.根据基于第3观点的车辆控制装置11,与基于第1观点的车辆控制装置11同样地,即使在与is控制相关的发动机再起动要求以及与hdc控制相关的减速控制要求在时间上重叠产生的情景中,也能够实现不会使乘员感到不适感的顺畅的车辆控制。
148.另外,能够将以可能会在同时执行is控制以及hdc控制的情况下发生的电源容量不足为起因的无法预期的hdc控制不良避免于未然。
149.另外,在与hdc控制相关的基于目标车速vstg的减速控制中,能够提高关于目标车速vstg的设定的自由度。该结果为,能够提高行驶于陡急的下坡路时的商品性。
150.而且,由于能够抑制电源应该对应的荷载电力的冲突,所以还能够期待缩小电源容量(谋求电源轻量化)的次要效果。
151.基于第4观点的车辆控制装置11在基于第3观点的车辆控制装置11中还可以采用如下构成:发动机控制部63(判断部)判断从与发动机再起动控制相关的开始时点起的经过时间是否超过规定时间。陡坡缓降控制部在由发动机控制部63做出了从与发动机再起动控制相关的开始时点起的经过时间超过了规定时间的意思的判断的情况下,允许基于目标车速vstg进行的减速控制的执行。
152.在基于第4观点的车辆控制装置11中,陡坡缓降控制部在由发动机控制部63做出了从与发动机再起动控制相关的开始时点起的经过时间超过了规定时间的意思的判断的情况下,允许基于目标车速vstg进行的减速控制的执行。在此,作为所述规定时间,例如设定了与设想为若在通常则发动机41会转移至爆发状态的爆发时间相当的时间长度。
153.该情况下,陡坡缓降控制部能够当从与发动机再起动控制相关的开始时点起的经过时间超过了设想为若在通常则发动机41会转移至爆发状态的爆发时间之后,换言之,待到发动机41转移至爆发状态,允许基于目标车速vstg进行的减速控制的执行。
154.根据基于第4观点的车辆控制装置11,能够待到发动机41转移至爆发状态,允许基于目标车速vstg进行的减速控制的执行。
155.另外,由于通过从与发动机再起动控制相关的开始时点起的经过时间来设定发动机41是否转移至爆发状态的参照,所以能够简单且适时地执行从is控制向hdc控制的切换。
156.另外,基于第5观点的车辆控制装置11在基于第3观点的车辆控制装置11中也可以构成为:发动机控制部63(判断部)监视所述一个电源的电压变动,并且在该一个电源的电压值从规定的电压阈值vtgth以下增大而超过该电压阈值vtgth的情况下,做出该一个电源的电压从降低状态恢复为正常状态的意思的判断。
157.在基于第5观点的车辆控制装置11中,发动机控制部63(判断部)在该一个电源的电压值从规定的电压阈值vtgth以下增大而超过该电压阈值的情况下,做出该一个电源的
电压从降低状态恢复为正常状态的意思的判断。在此,作为规定的电压阈值vtgth,设定了能够进行相对于起动电机、泵电机45那样的重荷载稳定的电力供给的指标值。
158.在该情况下,发动机控制部63在该一个电源的电压值从规定的电压阈值vtgth以下增大而超过该电压阈值vtgth的情况下,做出该一个电源的电压恢复至能够进行即使相对于重荷载也稳定的电力供给的正常状态的意思的判断。
159.根据基于第5观点的车辆控制装置11,能够准确掌握该一个电源的电力供给能力的恢复时期,由此能够适时且准确地执行从is控制向hdc控制的切换。
160.〔其他实施方式〕
161.以上说明的多个实施方式表示本发明的具体化的例子。因此,不能由这些例子来限定性解释本发明的技术范围。因为本发明在不脱离其要旨或其主要特征的范围内,能够以各种各样的方式来实施。
162.例如,在本发明的实施方式的车辆控制装置11的说明中,以hdc-ecu51以及vsa-ecu57联合构成本发明的“陡坡缓降控制部”为例进行了说明,但本发明并不限定于该例。
163.例如,也可以为,通过具有hdc-ecu51、vsa-ecu57各自的功能的统筹ecu来构成本发明的“陡坡缓降控制部”。
164.与上述同样地,也可以为,相对于具有hdc-ecu51、vsa-ecu57各自的功能的统筹ecu附加上eng-ecu53的功能,通过该统筹ecu来构成本发明的“车辆控制装置”。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。