1.本发明属于港口无人驾驶运输领域,涉及一种用于港口无人驾驶运输器械的精确停泊方法,特别涉及一种基于激光雷达点云配准与惯性组合导航单元导航的精确停泊方法。
背景技术:
2.在目前的港口无人驾驶领域,集装箱、散货的转运过程中,需要无人驾驶器械能够以非常高的精度(
±
5cm以内)在诸如龙门吊、漏斗、钢架等下方精确停泊。目前通用的传感器方案多使用惯性组合导航单元,激光雷达及地面磁钉进行定位。
3.但是在实际的行驶环境中,由于精确停泊时,运输器械上方会被龙门吊等设备遮挡,因此惯性组合导航单元的卫星信号较弱,偏移可能会达到20cm以上,远远不能满足要求。使用传统的激光slam方案进行定位,由于港口周边的物资转运频繁,环境变化大,因此该方案在大多数情况下无法完成定位。地面磁钉精度可以达到5cm以内,但需要将港口地面进行改造,且运行不灵活,当目标设备移动范围较大时,改造的工期和成本过高。
技术实现要素:
4.本发明的目的在于克服现有技术方案中的缺点与不足,提出一种在港口的复杂工作环境下能够将运输器械精确停泊至要求位置的方法;即在港口环境变化较大,目标设备移动范围大位置不固定且目标设备下方卫星信号差的情况下,通过固态激光雷达对目标设备(如龙门吊,漏斗等)进行扫描,结合惯性导航单元进行精确停泊的方法。
5.本发明提供了当港口无人驾驶运输器械安装有固态激光雷达及惯性导航单元时的精确停泊方法。本发明技术方案如下:在港口无人驾驶运输器械上安装固态激光雷达,固态激光雷达竖直向上进行照射;安装惯性组合导航单元,其位置位于器械中央;安装具备移动通信功能的计算与控制单元,并与固态激光雷达及惯性组合导航单元连接;运输器械停泊的目标设备安装差分式卫星定位单元及移动通信设备;港口无人驾驶运输器械具备以上特征时,其精确停泊步骤如下:步骤 2101:对目标设备进行三维点云建模;步骤 2102:无人驾驶运输器械收到工作任务后,与目标设备的差分式卫星定位单元进行通信,接收目标设备的经纬度坐标;步骤 2103:无人驾驶运输器械开始正常的无人驾驶行驶过程,并通过惯性组合导航单元获取自身实时位置,当其自身位置与步骤2102接收的目标设备经纬度坐标位置之间的距离小于10米时进入精确停泊模式,控制自身速度为0.1米/秒便于精确停泊;步骤 2104:无人驾驶运输器械的计算与控制单元将固态激光雷达数据与步骤2101中得到的三维模型进行实时匹配。确定当前位置与三维模型之间的偏移量即横向偏移和纵向偏移,并根据偏移量实时调整自身位置。当偏移量小于阈值时下发停止命令,精确停泊完成。
6.对于步骤2101,其详细步骤如下:步骤3101:将目标设备移动至目标备位停稳,同时将无人驾驶运输器械通过人工遥控方式停泊于精确停泊位置;步骤 3102:人工遥控无人驾驶运输器械,在目标设备下方进行来回移动,同时通过计算与控制单元采集惯性组合导航单元及固态激光雷达数据;步骤3103:将采集的数据导入建模软件,生成目标设备的三维点云模型文件,根据实际应用中变化较大的部分点云需要剔除并根据精确停泊的实际位置确定坐标原点;对于步骤2104,获取偏移量的步骤如下:步骤4101:将获取到的固态激光雷达点云进行体素滤波减少计算量;步骤4102:对固态激光雷达的实时点云根据反射率进行滤波,剔除点云中的噪声点;步骤4103:滤波后的点云根据实际使用中的情况根据x,y,z坐标进行限制,将实际过程中与模板变化较大的部分剔除;步骤4104:筛选完成后的点云和模板点云进行icp配准,得到当前位置与模板点云之间的横向与纵向偏移;在港口环境变化大,目标摄动位置不固定且移动范围广和目标设备下方卫星信号差的情况下,本发明利用固态激光雷达扫描目标设备的方法,能够将精确停泊的精度控制在5cm以内,并且不会受到港口环境的影响。
7.本发明的优点和有益效果是:1. 在港口环境变化较大的情况下,由于目标设备不会发生改变,因此本发明采用的位置计算方法不会受到周边环境变化的影响。
8.2. 惯性组合导航单元在本发明中的主要作用为精确停车过程前的初定为,其生效范围不会进入目标设备下,因此其在目标设备下的卫星信号强弱不会影响到本发明的停泊精度;3. 本发明对港口进行的改造仅限于对目标设备如龙门吊等加装差分式卫星导航单元,即无人驾驶器械的目标位置可以随着目标设备位置的改变而改变,因此相比磁钉方案具备很高的灵活性且不需要对港口地面进行改造。
9.附图说明。
10.下面结合附图和实施例对本发明作进一步说明。下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据本发明实施例的内容和这些附图获得其他的附图。
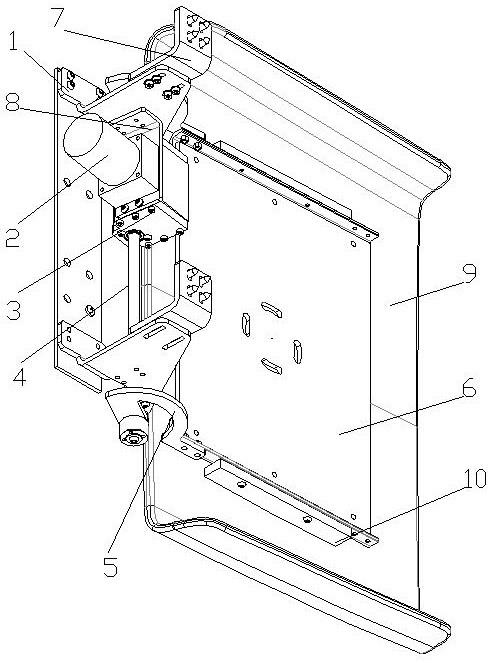
11.图1为本发明在运输车上的实际部署情况,其中1为固态激光雷达,2为惯性组合导航 单元,3为计算与控制平台。图2为传感器布置的俯视图,其中1为激光雷达,2为超声波探头。图3为精确停泊过程的步骤流程图。
12.具体实施方式。
13.下面结合附图对本发明作详细描述:本发明需要安装在具备线控能力的港口无人驾驶运输器械上,如agv,无人集卡和无人牵引车等。安装时,固态激光雷达需安装为竖直向上照射,如附图1所示。惯性组合导航单元可安装在任意位置,但需注意其前后天线的安装方式,两天线之间距离不可小于2米。
14.上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本申请中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
技术特征:
1.一种用于港口无人驾驶运输器械的精确停泊方法,其特征在于:港口无人驾驶运输器械上安装固态激光雷达,固态激光雷达竖直向上进行照射;港口无人驾驶运输器械上安装惯性组合导航单元,其位置位于器械中央;港口无人驾驶运输器械上安装具备移动通信功能的计算与控制单元,并与固态激光雷达及惯性组合导航单元连接;运输器械停泊的目标设备安装差分式卫星定位单元及移动通信设备;一种用于港口无人驾驶运输器械的精确停泊方法,当其具备权利要求1所述特征时,其步骤如下:步骤2101:对目标设备进行三维点云建模;步骤2102:无人驾驶运输器械收到工作任务后,与目标设备的差分式卫星定位单元进行通信,接收目标设备的经纬度坐标;步骤2103:无人驾驶运输器械通过惯性组合导航单元获取自身实时位置,当其自身位置接近步骤2102接收的目标设备经纬度坐标时进入精确停泊模式;步骤2104:无人驾驶运输器械的计算与控制单元将固态激光雷达数据与步骤2101中得到的三维模型进行实时匹配,确定当前位置与三维模型之间的偏移量,并根据偏移量实时调整自身位置。当偏移量小于阈值时下发停止命令,精确停泊完成。2.根据权利要求1所述的一种用于港口无人驾驶运输器械的精确停泊方法,其特征在于:步骤2101的方法步骤为:步骤3101:将目标设备移动至目标备位停稳,同时将无人驾驶运输器械通过人工遥控方式停泊于精确停泊位置;步骤3102:人工遥控无人驾驶运输器械,在目标设备下方进行来回移动,通过计算与控制单元采集惯性组合导航单元及固态激光雷达数据;步骤3103:将采集的数据导入建模软件,生成目标设备的三维点云模型文件。3.权利要求2所述的一种用于港口无人驾驶运输器械的精确停泊方法,其特征在于:步骤2104中使用迭代就近点算法进行实时激光点云与三维模型点云的匹配。
技术总结
本发明公开了一种用于港口无人驾驶运输器械的精确停泊方法,克服现有技术方案中的缺点与不足,提出一种在港口的复杂工作环境下能够将运输器械精确停泊至要求位置的方法;即在港口环境变化较大,目标设备移动范围大位置不固定且目标设备下方卫星信号差的情况下,通过固态激光雷达对目标设备(如龙门吊,漏斗等)进行扫描,结合惯性导航单元进行精确停泊的方法。法。法。
技术研发人员:张亮 卫罗珩 李雪峰
受保护的技术使用者:河南小狮智能科技有限公司
技术研发日:2020.12.03
技术公布日:2022/6/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。