1.本实用新型涉及模具修复设备领域技术,尤其是指一种提高效率的模具修复装置。
背景技术:
2.模具长时间使用后,其表面会出现缺损、开裂失效等现象,影响加工产品的质量,为保证模具的正常使用需要对模具进行修复。
3.早期的模具修复装置通常不具有夹持机构,导致修复时容易产生晃动,使修复的模具不够精准;后来出现有设置夹紧机构的模具修复装置,改善了修复时容易产生晃动的状况,提高了模具修复精准性,但其需要手动进行夹紧,操作复杂、加工效率低,且现有的模具修复装置在修复完成后,模具表面温度较高,需等待一定时间后才可搬离,影响了整体的加工效率。
4.因此,有必要对现有的模具修复装置进行改进。
技术实现要素:
5.有鉴于此,本实用新型针对现有技术存在之缺失,其主要目的是提供一种提高效率的模具修复装置,其设置有第一驱动装置、第一夹持装置、第二夹持装置和接触感应器,第一驱动装置驱动第一止挡块将待修复的模具推向接触感应器,接触感应器触发,从而启动第一夹持装置、第二夹持装置夹紧待修复的模具,实现对待修复的模具的自动夹紧,操作简单、加工效率高。
6.为实现上述目的,本实用新型采用如下之技术方案:
7.一种提高效率的模具修复装置,包括工作台、焊接机器人和控制器,所述工作台上依次设置有视觉检测系统、夹紧机构,所述工作台上还设置有x轴向导轨、设置有x轴向导轨上的x轴向移动机构,所述焊接机器人的输出端设置有焊接头,所述焊接头朝向夹紧机构;
8.所述x轴向移动机构包括有第一驱动装置和设置于第一驱动装置上的放置平台,所述放置平台的左侧向上凸设有第一止挡块;
9.所述夹紧机构包括有竖向移动装置和设置于竖向移动装置顶部的安装架,所述安装架包括有依次连接的前支撑部、右支撑部、后支撑部,所述前支撑部、右支撑部和后支撑部围构形成夹持空间,所述前支撑部、后支撑部分别设置有第一夹持装置和第二夹持装置,所述第一夹持装置和第二夹持装置均朝向夹持空间,所述右支撑部上设置有接触感应器;
10.所述视觉检测系统、焊接机器人、第一驱动装置、竖向移动装置、第一夹持装置、第二夹持装置和接触感应器均电连接于控制器。
11.作为一种优选方案,还包括有冷风机,所述右支撑部上设置有分流装置,所述分流装置包括有进风口和分流出口,所述冷风机的输出端连通进风口,所述分流出口朝向夹持空间。
12.作为一种优选方案,所述进风口位于分流装置的后侧。
13.作为一种优选方案,所述第一夹持装置包括有第二驱动装置和连接于第二驱动装置的第一夹持板,所述第二驱动装置设置于前支撑部的前侧;所述第二夹持装置包括有第三驱动装置和连接于第三驱动装置的第二夹持板,所述第三驱动装置设置于后支撑部的后侧,所述第二驱动装置、第三驱动装置均电连接于控制器。
14.作为一种优选方案,所述右支撑部的左侧凸设有第二止挡块。
15.作为一种优选方案,所述第一夹持板、第二夹持板、第一止挡块、第二止挡块上均设置有保护垫。
16.作为一种优选方案,所述竖向移动装置设置有两个,两个竖向移动装置分别位于前支撑部和后支撑部的下方且位于x轴向导轨的前、后侧。
17.本实用新型与现有技术相比具有明显的优点和有益效果,具体而言,由上述技术方案可知:
18.其主要是,其通过设置有第一驱动装置、第一夹持装置、第二夹持装置和接触感应器,第一驱动装置驱动第一止挡块将待修复的模具推向接触感应器,接触感应器触发,从而启动第一夹持装置、第二夹持装置夹紧待修复的模具,实现对待修复的模具的自动夹紧,操作简单、加工效率高;
19.其次是,设置有冷风机和分流装置,通过分流装置的分流,使得冷风可大面积的吹向待修复的模具,加快待修复的模具的冷却,从而进一步提高模具加工效率;
20.再者是,在第一夹持板、第二夹持板、第一止挡块、第二止挡块上均设置有保护垫,可以避免夹持装置在夹持后,留下印记,对模具启动保护作用。
21.为更清楚地阐述本实用新型的结构特征和功效,下面结合附图与具体实施例来对本实用新型进行详细说明。
附图说明
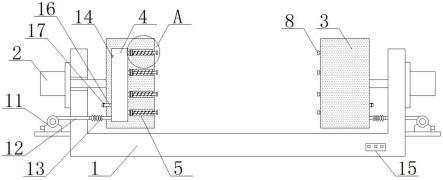
22.图1是本实用新型之较佳实施例的俯视图;
23.图2是本实用新型之较佳实施例的正视图;
24.图3是本实用新型之较佳实施例的分流装置的剖视图;
25.图4是本实用新型之较佳实施例的夹持机构的俯视图;
26.图5是本实用新型之较佳实施例的控制框图。
27.附图标识说明:
28.10、工作台20、焊接机器人
29.21、焊接头30、控制器
30.40、视觉检测系统50、夹紧机构
31.51、竖向移动装置52、安装架
32.521、前支撑部522、右支撑部
33.523、后支撑部524、第二止挡块
34.53、第一夹持装置531、第二驱动装置
35.532、第一夹持板54、第二夹持装置
36.541、第三驱动装置542、第二夹持板
37.55、接触感应器60、x轴向移动机构
38.61、第一驱动装置62、放置平台
39.621、第一止挡块70、冷风机
40.80、分流装置801、进风口
41.802、分流出口90、保护垫。
具体实施方式
42.请参照图1至图5所示,其显示出了本实用新型之较佳实施例的具体结构,包括有工作台10、焊接机器人20和控制器30,所述工作台10上依次设置有视觉检测系统40、夹紧机构50,所述工作台10上还设置有x轴向导轨、设置有x轴向导轨上的x轴向移动机构60,所述焊接机器人20的输出端设置有焊接头21,所述焊接头21朝向夹紧机构50;
43.所述x轴向移动机构60包括有第一驱动装置61和设置于第一驱动装置上的放置平台62,所述放置平台62的左侧向上凸设有第一止挡块621;
44.所述夹紧机构50包括有竖向移动装置51和设置于竖向移动装置51顶部的安装架52,所述安装架52包括有依次连接的前支撑部521、右支撑部522、后支撑部523,所述前支撑部521、右支撑部522和后支撑部523围构形成夹持空间,所述前支撑部521、后支撑部523分别设置有第一夹持装置53和第二夹持装置54,所述第一夹持装置53和第二夹持装置54均朝向夹持空间,所述右支撑部522上设置有接触感应器55;
45.所述视觉检测系统40、焊接机器人20、第一驱动装置61、竖向移动装置51、第一夹持装置53、第二夹持装置54和接触感应器55均电连接于控制器30。其中第一驱动装置61可为伺服电机配合丝杠螺母副的方式,竖向移动装置51为伸缩气缸。
46.具体而言,所述第一夹持装置53包括有第二驱动装置531和连接于第二驱动装置531的第一夹持板532,所述第二驱动装置531设置于前支撑部521的前侧;所述第二夹持装置54包括有第三驱动装置541和连接于第三驱动装置541的第二夹持板542,所述第三驱动装置541设置于后支撑部523的后侧,所述第二驱动装置531、第三驱动装置541均电连接于控制器,所述第二驱动装置531、第三驱动装置541均为伸缩气缸。
47.进一步的,还包括有冷风机70,所述右支撑部522上设置有分流装置80,所述分流装置80包括有进风口801和分流出口802,所述冷风机70的输出端连通进风口801,所述分流出口802朝向夹持空间;所述进风口801位于分流装置80的后侧,利于放置平台62的正常通过,不会出现管道阻挡的现象。
48.优选的,所述右支撑部522的左侧凸设有第二止挡块524,所述接触感应器55位于第二止挡块524的左侧;所述第一夹持板532、第二夹持板542、第一止挡块621、第二止挡块524上均设置有保护垫90;
49.以及,所述竖向移动装置51设置有两个,两个竖向移动装置51分别位于前支撑部521和后支撑部523的下方且位于x轴向导轨的前、后侧。
50.详述本实施例的工作过程如下:
51.首先将待修复的模具放在放置平台上,控制器先启动视觉检测系统对待修复的模具进行图像采集分析;然后控制器驱动第一驱动装置带动放置平台向右移动,在待修复的模具触碰到右支撑部上的接触感应器后;控制器驱动第一驱动装置停止运行,同时,驱动第二驱动装置、第三驱动装置将待修复的模具夹紧;接着控制器启动焊接机器人对待修复的
模具进行焊接;焊接完成后,控制器驱动第二驱动装置、第三驱动装置解除夹紧状态,同时驱动竖向移动装置向上移动,让放置平台顺利通过;接着驱动第一驱动装置继续向右移动,进行下料,下料完成后,第一驱动装置返回起点,进行下一次焊接流程。
52.本实用新型的设计重点在于:
53.其主要是,其通过设置有第一驱动装置、第一夹持装置、第二夹持装置和接触感应器,第一驱动装置驱动第一止挡块将待修复的模具推向接触感应器,接触感应器触发,从而启动第一夹持装置、第二夹持装置夹紧待修复的模具,实现对待修复的模具的自动夹紧,操作简单、加工效率高;
54.其次是,设置有冷风机和分流装置,通过分流装置的分流,使得冷风可大面积的吹向待修复的模具,加快待修复的模具的冷却,从而进一步提高模具加工效率;
55.再者是,在第一夹持板、第二夹持板、第一止挡块、第二止挡块上均设置有保护垫,可以避免夹持装置在夹持后,留下印记,对模具启动保护作用。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。