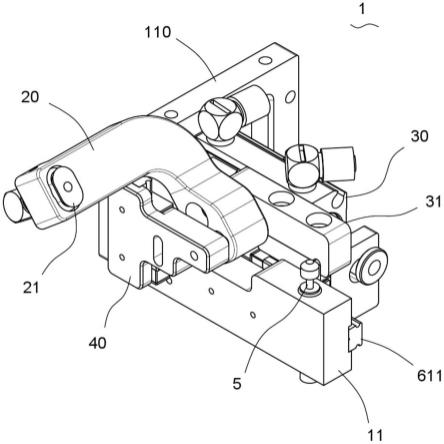
1.本发明属于激光技术领域,尤其涉及一种激光打标机精确打标控制方法。
背景技术:
2.激光打标机(laser marking machine)是用激光束在各种不同的物质表面打上永久的标记。打标的效应是通过表层物质的蒸发露出深层物质,从而刻出精美的图案、商标和文字,激光打标机主要分为:co2激光打标机、半导体激光打标机、光纤激光打标机和yag激光打标机,激光打标机主要应用于一些要求更精细、精度更高的场合。应用于电子元器件、集成电路(ic)、电工电器、手机通讯、五金制品、工具配件、精密器械、眼镜钟表、首饰饰品、汽车配件、塑胶按键、建材、pvc管材。
3.激光打标机的结构包括xy轴操作台,通过xy轴操作台控制激光头的点位坐标,然后可在目标器件上打出图标。由于xy轴操作台只能控制激光头在平面上移动,对于一些目标器件规则区曲面,可控制目标器件转动来完成激光打标。而对于形状非常特殊的非规则曲面,则无法通过该方法完成打标。目前方法还是只能按照平面的图标形状在曲面上打印,使得图标的视觉效果有明显偏差,打标精度不高。
技术实现要素:
4.鉴于上述问题,本发明的目的在于提供一种激光打标机精确打标控制方法,旨在解决现有控制方法无法适应曲面打印的技术问题。
5.本发明采用如下技术方案:
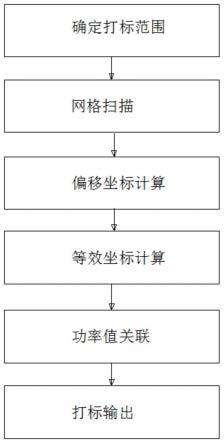
6.所述激光打标机精确打标控制方法包括下述步骤:
7.步骤s1、在激光打标机上安装激光测距探头,当接收到待打标的图标数据时,根据图标数据确定在目标器件上的打标范围;
8.步骤s2、控制激光打标机激光测距探头网格扫描所述打标范围区域,获取高度数据;
9.步骤s3、根据网格扫描的扫描点结合对应的高度数据确定各扫描点曲率,并换算成偏移坐标;
10.步骤s4、根据扫描点的点坐标以及对应的偏移坐标,得到扫描点的等效坐标;
11.步骤s5、将每个等效坐标关联一个功率输出值,所述功率输出值与扫描点对应的高度数据成正比;
12.步骤s6、按照等效坐标以及对应的功率输出值控制激光打标机在打标范围内打出目标图标图案。
13.进一步的,步骤s2中,网格扫描的行间隔为δa,列间隔为δb,对于第i行第j列的扫描点a
ij
=(xi,yj),扫描得到的高度数据为h
ij
,所述步骤s3中,扫描点曲率包括行曲率和列曲率,其中列曲率为行曲率为扫描点a
ij
的偏移
坐标为:
[0014][0015]
进一步的,扫描点a
ij
的等效坐标为:
[0016][0017]
进一步的,等效坐标a
ij”=(x
i”,y
j”),其关联的功率输出值w
ij
=w0 k
×
(h
ij-h0)2,h0为基准高度,w0为基准功率。
[0018]
进一步的,所述步骤s6具体过程如下:
[0019]
根据各个等效坐标建立多条水平纬线,建立原则是,使得水平纬线附近的等效坐标距离水平纬线的距离方差之和尽可能小;
[0020]
将等效坐标x坐标不变,y坐标进行微调,使得等效坐标落入对应附近的水平纬线上;
[0021]
将根据微调后的等效坐标以及对应的功率输出值,进行逐行打标输出目标图标图案。
[0022]
本发明的有益效果是:本发明通过设置激光测距探头扫描带打标器件的打标区域,通过距离探测计算出行列曲率,然后对扫描点的坐标进行等效换算,最终得到等效坐标,根据等效坐标进行打标,可以提高打标准确度。
附图说明
[0023]
图1是本发明实施例提供的激光打标机精确打标控制方法的流程;
[0024]
图2是网格扫描示意图;
[0025]
图3是等效坐标微调示意图。
具体实施方式
[0026]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0027]
为了说明本发明所述的技术方案,下面通过具体实施例来进行说明。
[0028]
图1示出了本发明实施例提供的激光打标机精确打标控制方法的流程,为了便于说明仅示出了与本发明实施例相关的部分。
[0029]
如图1所示,所述激光打标机精确打标控制方法包括下述步骤:
[0030]
步骤s1、确定打标范围步骤:在激光打标机上安装激光测距探头,当接收到待打标的图标数据时,根据图标数据确定在目标器件上的打标范围。
[0031]
激光测距探头位于激光打标机的激光头附近,激光打标机具有xy轴扫描平台,可控制激光头在水平面xy方向扫描。
[0032]
本实施例所述的到待打标的图标数据可以为文字或者图案,无论是何种形态,本质都是一样的。正常情况下,根据输入的图标数据,可以自动转换成平面的坐标数据,根据控制探头沿x方向y方向扫描,即可完成打标操作。
[0033]
但是对于非常规曲面,其表面变化是不可预期的,也没有规律,如果直接按照平面打标,则最终打标出的图标形态有明显误差,视觉效果不佳。为此,本实施例通过安装激光测距探头先扫描打标范围的曲面变化。
[0034]
步骤s2、网格扫描步骤:控制激光打标机激光测距探头网格扫描所述打标范围区域,获取高度数据。
[0035]
具体操作时,如图2所示,网格扫描的行间隔为δa,列间隔为δb,对于第i行第j列的扫描点a
ij
=(xi,yj),扫描得到的高度数据为h
ij
。扫描网格是预先确定好的,网格行列间隔与激光打标机激光头的打标点行列偏移一致。在平面状态下,各扫描点就是激光头的打标点,但是实际目标器件为曲面,因此需要对扫描点的位置进行转换。
[0036]
步骤s3、偏移坐标计算步骤:根据网格扫描的扫描点结合对应的高度数据确定各扫描点曲率,并换算成偏移坐标。
[0037]
距离扫描只能扫描到曲面的高度变化,不能准确得到扫描点的曲率,包括曲率变化方向。本实施例为了便于计算,将曲率计算分成行曲率和列曲率,即能体现出扫描点在行方向上的变化和在列方向上的变化。
[0038]
所述步骤s3中,扫描点曲率包括行曲率和列曲率,其中列曲率为行曲率为扫描点a
ij
的偏移坐标为:
[0039][0040]
该方式将当前扫描点列方向曲率定义为扫描点左右相邻两列点的变化斜率,扫描点行方向曲率定义为扫描点上下相邻两行点的变化斜率。这样即可得到扫描点的行列偏移,即偏移坐标。
[0041]
步骤s4、等效坐标计算步骤:根据扫描点的点坐标以及对应的偏移坐标,得到扫描点的等效坐标。
[0042]
有扫描点a
ij
的坐标为(xi,yj),因此可知扫描点的等效坐标为:
[0043][0044]
为等效坐标a
ij”=(x
i”,y
j”)。
[0045]
步骤s5、功率值关联步骤:将每个等效坐标关联一个功率输出值,所述功率输出值与扫描点对应的高度数据成正比。
[0046]
由于距离发生变化,如果激光头的功率值不变化,那么打标出来的图标会深浅不一,甚至无法打标显现,影响美观。因此本步骤还要为等效坐标关联一个功率输出值w
ij
=w0 k
×
(h
ij-h0)2,h0为基准高度,w0为基准功率。在水平面下,各扫描点的高度相同,因此都有相同的功率输出值。当高度变化时,所需功率变化与高度数据变化成正比。实际操作中,功率输出值的变化与距离差值的平方成正比。因此通过标定k值,即可得到各等效坐标的功率输出值。
[0047]
步骤s6、打标输出步骤:按照等效坐标以及对应的功率输出值控制激光打标机在
打标范围内打出目标图标图案。
[0048]
正常情况下,在曲面下,扫描点在xy方向都有偏移,因此是调整后的等效坐标是杂乱无章的。当然可以直接按照等效坐标进行打标,但是实际操作下,由于激光头需要根据等效坐标在xy方向上频繁变化,不利于提高打标效率,也会减少设备寿命。因此本步骤可采用如下优选方式:
[0049]
所述步骤s6具体过程如下:
[0050]
根据各个等效坐标建立多条水平纬线,建立原则是,使得水平纬线附近的等效坐标距离水平纬线的距离方差之和尽可能小;
[0051]
将等效坐标x坐标不变,y坐标进行微调,使得等效坐标落入对应附近的水平纬线上;
[0052]
将根据微调后的等效坐标以及对应的功率输出值,进行逐行打标输出目标图标图案。
[0053]
如图3所示,假设等效坐标为图示中的黑点,分布比较散乱。本步骤通过构建水平纬线,通过计算附近等效坐标距离水平纬线的距离差值平方和,即距离方差,距离方差越小越好。具体实现时,不用考虑x坐标值,只用考虑y坐标值,将y坐标值按照大小范围进行分组,每组y坐标值计算出距离方差最小的一个y值即可,该y值即为水平纬线的y值。最后将等效坐标的x值不变,y值直接改成该组的水平纬线y值,即可得得到微调后的等效坐标,最后根据功率输出值进行逐行打标即可,这样在每行打标时,不用调整y方向,只用调整x方向,最终打标出来图标视觉效果与直接按照等效坐标打标差别不大。
[0054]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。