1.本发明涉及无人机技术领域,尤其涉及一种基于可见光、探照灯无人机的双机协同作业系统。
背景技术:
2.无人驾驶飞机简称“无人机”,英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。
3.物体本身是不发光的,是由于外界光的照射到物体表面,物体材料的吸光特性吸收作用,一般光照射到物体表面会发生透射,吸收和反射等现象。光射到物体表面时有一部分光会发生反射,之能看见本身不发光的物体,就是因为该物体对光的反射。
4.在无人机行业应用中,夜间执行任务看不清目标及环境一直行业内痛点,现在关于夜间成像效果,行业内暂时没有有效的能满足实际要求夜间成像效果,无论是微光,星光,激光补光云台,实际的夜间使用效果都不理想,视频画面的反光和漫反射问题很严重。
技术实现要素:
5.(一)解决的技术问题
6.针对现有技术的不足,本发明提供了一种基于可见光、探照灯无人机的双机协同作业系统,具备解决无人机执行夜间任务,取代夜视微光、星光、激光补光等目前尚不成熟缺陷等优点,用于解决现有技术中夜间成像效果,行业内暂时没有有效的能满足实际要求夜间成像效果,无论是微光,星光,激光补光云台,实际的夜间使用效果都不理想,视频画面的反光和漫反射问题很严重的问题。
7.(二)技术方案
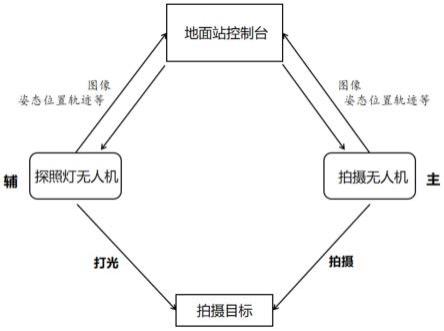
8.本发明提供如下技术方案:一种基于可见光、探照灯无人机的双机协同作业系统,包括地面站控制台、探照灯无人机以及拍摄无人机,该探照灯无人机的机身上安装有探照灯以及辅助摄像头,该拍摄无人机的机身上安装有可见光云台。
9.通过本发明所提供的一种基于可见光、探照灯无人机的双机协同作业系统,能够便于无人机进行夜间的拍摄,且相对于普通的无人机拍摄方式,本发明所提供的双机作业系统具备解决无人机执行夜间任务,取代夜视微光、星光、激光补光等目前尚不成熟缺陷等优点,用于解决现有技术中夜间成像效果,行业内暂时没有有效的能满足实际要求夜间成像效果,无论是微光,星光,激光补光云台,实际的夜间使用效果都不理想,视频画面的反光和漫反射问题很严重的问题。
10.在一种可能的实施方式中,该地面站控制台包括:控制模块,设置于该地面站控制台内部;通讯模块,设置于该地面站控制台内部,用于电性连接该控制模块;坐标校对模块,设置于该地面站控制台内部,用于电性连接该通讯模块;传输模块,设置于该地面站控制台内部,用于电性连接该通讯模块。
11.在一种可能的实施方式中,该控制模块用于控制该探照灯无人机、拍摄无人机以
及探照灯。
12.在一种可能的实施方式中,该拍摄无人机包括:光源识别模块,设置于该拍摄无人机内部,用于对拍摄无人机周围的光源亮度进行识别;反馈模块,设置于该拍摄无人机内部,电性连接该光源识别模块;定位模块,固定于该拍摄无人机内部,电性连接该反馈模块。
13.在一种可能的实施方式中,该反馈模块信号连接该通讯模块以及探照灯无人机。
14.在一种可能的实施方式中,该定位模块与该坐标校对模块信号连接,用于对拍摄无人机的位置进行定位。
15.通过设置能够保证在使用过程中进行拍摄的拍摄无人机,能够保证稳定的进行拍摄,且能够对周围的光源进行检测,从而能够保证在进行拍摄时向地面站控制台发射稳定的坐标位置,从而便于探照灯无人机进行补光操作。
16.在一种可能的实施方式中,该探照灯无人机包括:接收模块,固定于该探照无人机内部,用于信号连接该反馈模块;辅助坐标模块,电性连接该接收模块,用于根据拍摄无人机的位置进行空间坐标的建立;辅助调控模块,固定于该探照无人机内部,电性连接该接收模块。
17.在一种可能的实施方式中,该接收模块信号连接该通讯模块,该可见光云台信号连接该传输模块。
18.通过设置能够在拍摄无人机进行夜间拍摄的过程中对所拍摄的画面进行补光,从而减少拍摄无人机在进行拍摄的过程中所出现的视频画面的反光和漫反射的问题,从而提升拍摄无人机在使用过程中的拍摄稳定性。
19.与现有技术相比,本发明提供了一种基于可见光、探照灯无人机的双机协同作业系统,具备以下有益效果:
20.1、本发明通过设置能够保证在使用过程中进行拍摄的拍摄无人机,能够保证稳定的进行拍摄,且能够对周围的光源进行检测,从而能够保证在进行拍摄时向地面站控制台发射稳定的坐标位置,从而便于探照灯无人机进行补光操作。
21.2、本发明通过设置能够在拍摄无人机进行夜间拍摄的过程中对所拍摄的画面进行补光,从而减少拍摄无人机在进行拍摄的过程中所出现的视频画面的反光和漫反射的问题,从而提升拍摄无人机在使用过程中的拍摄稳定性。
22.应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本发明。
附图说明
23.图1为本发明所提供的一种基于可见光、探照灯无人机的双机协同作业系统的运行示意图;
24.图2为本发明所提供的一种基于可见光、探照灯无人机的双机协同作业系统的信号连接传输示意图。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
26.实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
27.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
28.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
29.如图1-2所示,本发明提供了一种基于可见光、探照灯无人机的双机协同作业系统,包括地面站控制台、探照灯无人机以及拍摄无人机,该探照灯无人机的机身上安装有探照灯以及辅助摄像头,该拍摄无人机的机身上安装有可见光云台。
30.通过本发明所提供的一种基于可见光、探照灯无人机的双机协同作业系统,能够便于无人机进行夜间的拍摄,且相对于普通的无人机拍摄方式,本发明所提供的双机作业系统具备解决无人机执行夜间任务,取代夜视微光、星光、激光补光等目前尚不成熟缺陷等优点,用于解决现有技术中夜间成像效果,行业内暂时没有有效的能满足实际要求夜间成像效果,无论是微光,星光,激光补光云台,实际的夜间使用效果都不理想,视频画面的反光和漫反射问题很严重的问题。
31.在一种可能的实施方式中,该地面站控制台包括:控制模块,设置于该地面站控制台内部;通讯模块,设置于该地面站控制台内部,用于电性连接该控制模块;坐标校对模块,设置于该地面站控制台内部,用于电性连接该通讯模块;传输模块,设置于该地面站控制台内部,用于电性连接该通讯模块。
32.在一种可能的实施方式中,该控制模块用于控制该探照灯无人机、拍摄无人机以及探照灯。
33.在一种可能的实施方式中,该拍摄无人机包括:光源识别模块,设置于该拍摄无人机内部,用于对拍摄无人机周围的光源亮度进行识别;反馈模块,设置于该拍摄无人机内部,电性连接该光源识别模块;定位模块,固定于该拍摄无人机内部,电性连接该反馈模块。
34.在一种可能的实施方式中,该反馈模块信号连接该通讯模块以及探照灯无人机。
35.在一种可能的实施方式中,该定位模块与该坐标校对模块信号连接,用于对拍摄无人机的位置进行定位。
36.通过设置能够保证在使用过程中进行拍摄的拍摄无人机,能够保证稳定的进行拍摄,且能够对周围的光源进行检测,从而能够保证在进行拍摄时向地面站控制台发射稳定的坐标位置,从而便于探照灯无人机进行补光操作。
37.在一种可能的实施方式中,该探照灯无人机包括:接收模块,固定于该探照无人机内部,用于信号连接该反馈模块;辅助坐标模块,电性连接该接收模块,用于根据拍摄无人
机的位置进行空间坐标的建立;辅助调控模块,固定于该探照无人机内部,电性连接该接收模块。
38.在一种可能的实施方式中,该接收模块信号连接该通讯模块,该可见光云台信号连接该传输模块。
39.通过设置能够在拍摄无人机进行夜间拍摄的过程中对所拍摄的画面进行补光,从而减少拍摄无人机在进行拍摄的过程中所出现的视频画面的反光和漫反射的问题,从而提升拍摄无人机在使用过程中的拍摄稳定性。
40.此外本发明还提供了一种基于可见光、探照灯无人机的双机协同作业系统的使用方法,在使用时,使拍摄无人机以及探照灯无人机升空,拍摄无人机利用内部的定位模块将拍摄无人机自身的位置传输至地面站控制台以及探照灯无人机,通讯模块接触到拍摄无人机的坐标位置,同时,利用坐标校对模块对拍摄无人机的位置进行校对,之后由控制模块对拍摄无人机的飞行轨迹进行控制,拍摄无人机内部的光源识别模块对拍摄无人机周围的光源强度以及位置反馈至地面站控制台以及探照灯无人机,探照灯无人机内部的接收模块在接收到拍摄无人机的反馈,辅助坐标模块以拍摄无人机为坐标原点进行空间坐标的建立,同时根据接收模块所接收到的光源识别模块,对探照灯无人机的位置始终根据所需要补光的位置进行移动,从而在需要进行补光时及时进行补光。
41.地面站控制台同时控制拍摄无人机 探照灯无人机,并实时显示两无人机的传送图像及(轨迹、高度、姿态、位置等)状态,正常飞行时二者不同高程并行飞行,执行具体夜间拍摄任务时,以夜间拍摄路上车牌为例进行说明,拍摄无人机 探照灯无人机组合状态下,先由拍摄无人机云台头对目标车辆进行锁定,然后以拍摄无人机的运行轨迹为主,紧接着探照灯无人机相对拍摄无人机动态变换轨迹对拍摄目标进行补光,地面站控制台观察,拍摄无人机没有强光反射等影响拍摄的因素时,探照灯无人机与拍摄无人机之间的相对位置保持即可。
42.尽管已经示出和描述了本发明实施的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
43.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
44.下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。