1.本发明涉及空间在轨设备相关技术领域,具体涉及一种空间在轨离心机以及空间实验柜体。
背景技术:
2.空间重力科学作为当前空间实验主要研究方向之一,在生命科学与生物技术、流体和燃烧等领域均涌现开展重力研究的需求,地球上由于重力的客观存在,不能提供一倍重力加速度以外的变重力环境,而空间站是能提供纯洁变重力实验环境的优异实验场所,通过旋转产生模拟变重力,是当前空间重力实验主要实现途径。
3.国外科研人员在落塔、探空火箭、返回卫星、和平号空间站、国际空间站上开展了一系列生命科学、流体科学等领域的空间重力科学实验,研究重力因素在生命现象和科学机理中的影响机制。如在国际空间站平台上,从微尺度的细胞、分子水平的基因、蛋白质组学研究,到小生物体的组织结构、功能研究,再到复杂生物体的研究,依此可建立与人体研究学的关系。为满足开展空间重力科学实验的需求,nasa、esa、jaxa、csa等组织采用单独或联合方式开发了不同的变重力实验设备,其中主要是在iss上应用。变重力设施的趋势是变重力设施尺寸越来越大、支持开展的实验范围越来越广。
4.随着我国空间探索活动的发展,国内也陆续开始进行空间重力科学实验研究。神舟搭载的通用生物箱一代曾进行生物样品空间培养实验,后续发展的通用生物箱二代,包括两个机箱,其中一个内有一个小型的离心机提供重力实验场所,另一个提供微重力实验场所。中科院力学所国家微重力实验室与俄罗斯keldysh研究中心合作,于1999年在和平号上开展部分重力条件下的气液两相流科学实验研究。中国科学院空间科学与应用总体部预先研究了面向大型离心机设备的模样样机,可以提供0.1~2g可调节模拟重力。
技术实现要素:
5.本发明为了解决现有技术问题的一种或几种,提供了一种空间在轨离心机以及空间实验柜体。
6.本发明解决上述技术问题的技术方案如下:一种空间在轨离心机,包括支撑架、驱动装置、自动平衡调节机构、平衡测量力台、转子控制器和转盘,所述转子控制器以及所述自动平衡调节机构分别安装在所述转盘上,所述转子控制器用于为转盘上的科学实验载荷提供电控,所述转子控制器通过无线传能方式与定子控制器连接;所述支撑架的一侧面上设有沿前后方向布置的导轨,所述平衡测量力台中部具有定子装配孔并安装在所述支撑架的另一侧面中部,所述驱动装置底部的定子端装配在所述定子装配孔内,所述驱动装置底部的定子端还安装有驱动电路板,所述驱动装置顶部的转子端与所述转盘固定连接;所述驱动电路板分别与所述自动平衡调节机构、驱动装置和平衡测量力台连接。
7.本发明的有益效果是:本发明的空间在轨离心机,在总体布局上采用模块化和区域化思想,利用支撑架布局在离心机的最底部作为离心机驱动装置的机械支撑,也可作为
与柜体之间电源、信息等的联接枢纽;利用驱动装置对转盘进行驱动,并利用自动平衡调节机构为转盘的平衡运动进行调节,以适应实验模块更换等状态变化引起的转盘平衡变化。本发明的空间在轨离心机能够为科学实验模块提供0.01g~2g模拟重力环境,还能够为变重力科学实验模块提供能在轨便捷更换的机械接口;转盘上能够支持多种标准实验模块,并可组合使用。
8.在上述技术方案的基础上,本发明还可以做如下改进。
9.进一步,所述驱动装置包括电机转子、电机定子、轴承、中心转盘、支撑环、无线传能发射端和无线传能接收端,所述轴承位于所述支撑环的顶部内侧且轴承外圈与支撑环的顶部内侧壁固定连接,所述电机转子位于所述轴承的内侧且与轴承内圈固定连接;所述电机定子套设在所述电机转子的内侧且与支撑环的固定连接;所述驱动电路板安装在所述支撑环的底部并与所述电机定子连接,所述电机转子与所述中心转盘固定连接;所述无线传能发射端固定在所述电机定子的顶部,所述无线传能接收端与所述中心转盘固定连接。
10.采用上述进一步方案的有益效果是:驱动装置将电机转子设置在电机定子的外周侧,即采用外转子形式的直流无刷力矩电机,将电机转子直接装配在轴承内圈下方,驱动轴承内圈从而带动中心转盘的结构形式,结构紧凑,支撑效果更好,使中心转盘靠外布置,受力更加分散稳定。而且本发明的驱动装置还减少了额外传动机构,提高了整个驱动装置的可靠性,实现了驱动装置的高度一体化和模块化。采用电磁感应技术的无线传能方案取代导电滑环,无线电能传输技术是通过电磁场在没有直接接触的情况下传输电能,不再受限于接触式传输的低速状态、摩擦损耗和环境污染等,避免了传统的导电滑环进行定转子电能传输满足不了空间站长寿命要求。
11.进一步,所述驱动装置还包括磁感应齿圈和磁感应读数头,所述磁感应读数头安装在所述驱动电路板的上表面,所述磁感应齿圈安装在所述电机转子的下法兰面上,所述磁感应齿圈与所述电机转子同轴布置,所述磁感应齿圈的齿端面与所述磁感应读数头间隔布置。
12.采用上述进一步方案的有益效果是:通过将磁感应齿圈安装在电机转子的下法兰面上,缩小了轴向尺寸,减小了装配空间,能够使磁感应齿圈和磁感应读数头更好的与驱动电路板进行配合,结构更加紧凑稳定。
13.进一步,所述自动平衡调节机构包括环形导轨和平衡块组件,所述环形导轨同轴装配在所述转盘上;所述平衡块组件包括平衡运动件、驱动组件和接线盒,所述接线盒与所述驱动电路板连接,所述驱动组件与所述平衡运动件连接,所述接线盒与所述驱动组件连接,所述平衡运动件设置在所述环形导轨上且能够在所述驱动组件的驱动下沿所述环形导轨运动;所述接线盒上设有霍尔传感器,所述接线盒根据霍尔传感器获得的限位信号控制所述驱动组件运行,所述接线盒还根据所述驱动电路板的平衡量调节指令控制所述驱动组件运行;所述转盘的上侧面设有与所述霍尔传感器对应布置的限位磁钢,当所述平衡块组件运动至限位磁钢所在位置,所述霍尔传感器与所述限位磁钢配合并获得限位信号。
14.采用上述进一步方案的有益效果是:通过设置环形导轨和平衡块组件,并通过在接线盒上设置霍尔传感器,能够根据霍尔传感器获得的限位信号对驱动组件进行运行控制,例如可以对驱动组件进行启停控制或进行正反转控制。
15.进一步,所述霍尔传感器为两个,两个所述霍尔传感器沿所述环形导轨的径向间
隔布置;所述限位磁钢包括终点限位磁钢和起点限位磁钢,所述终点限位磁钢和起点限位磁钢分别与所述转盘上的两个所述霍尔传感器一一对应配合。
16.采用上述进一步方案的有益效果是:通过设置两个径向间隔布置的霍尔传感器,在获得限位信号的时候相互之间不干扰,能够对平衡块组件实现起点限位和终点限位。
17.进一步,所述平衡块组件为两个,两个所述平衡块组件的底壁上分别设有机械限位块,两个所述机械限位块均位于所述环形导轨的外环侧,其中一个机械限位块与所述环形导轨的外环边缘的距离大于另一个机械限位块与所述环形导轨的外环边缘的距离。
18.采用上述进一步方案的有益效果是:通过设置两个平衡块组件,能够对旋转装置的平衡量进行有效调节。
19.进一步,所述驱动组件包括驱动电机、蜗轮、蜗杆和驱动齿轮,所述驱动电机与所述接线盒连接,所述环形导轨上设有齿圈,所述驱动电机安装在所述平衡运动件上,所述蜗轮、蜗杆和驱动齿轮均位于所述平衡运动件的内侧,所述蜗轮转动连接在所述平衡运动件上,所述驱动电机的输出轴与蜗杆连接,所述蜗杆与蜗轮啮合,所述驱动齿轮与所述蜗轮同轴连接且与所述齿圈啮合。
20.采用上述进一步方案的有益效果是:采用蜗轮蜗杆驱动机构,驱动组件结构紧凑,能够实现平衡运动件的自动驱动运行,有利于平衡量调节过程的稳定。
21.进一步,所述自动平衡调节机构还包括润滑组件,所述润滑组件设置在所述平衡运动件的内侧;所述润滑组件包括润滑座和润滑块,所述润滑座固定在所述平衡运动件的内侧壁上,所述润滑块连接在所述润滑座上且与所述环形导轨的内环边缘或外环边缘接触。
22.采用上述进一步方案的有益效果是:通过设置润滑组件,有利于对环形导轨的润滑,避免平衡运动件沿环形导轨运行出现卡滞等。
23.进一步,所述支撑架一侧面的前端、中部以及后端分别设有前端连接螺栓、中部连接螺栓和后端连接螺栓,所述支撑架一侧面对应中部连接螺栓前侧的位置设有第一导向座,所述支撑架一侧面对应后端连接螺栓的前侧位置设有第二导向座。
24.采用上述进一步方案的有益效果是:通过设置前端连接螺栓、中部连接螺栓和后端连接螺栓,能够将定子支撑组件有效稳定的支撑固定在空间站柜体内部;通过设置导向座,能够为定子支撑组件的中部和后端连接螺栓的固定连接提供稳定导向。
25.进一步,所述中部连接螺栓包括中间连接螺栓、中前连接螺栓和中后连接螺栓,所述中前连接螺栓和中后连接螺栓分别位于所述中间连接螺栓的前侧和后侧,所述中间连接螺栓的前侧设有第一导向座a,所述中前连接螺栓的前侧设有第一导向座b,所述中后连接螺栓的前侧设有第一导向座c。
26.采用上述进一步方案的有益效果是:通过设置中前连接螺栓和中后连接螺栓,有利于支撑组件的稳定连接固定。
27.进一步,所述导轨为两个且分别位于所述定子装配孔的左右两侧,其中一个导轨为水平方向限位的t型导轨,另一个导轨为垂直方向限位的u型导轨;所述支撑架上设有多根连接筋和多个斜支撑筋。
28.采用上述进一步方案的有益效果是:通过在定位装配孔的左右两侧分别设置导轨,有利于支撑组件稳定装配在柜体内。
29.进一步,所述支撑架中部设有安装孔,所述平衡测量力台的一侧具有一圈法兰边,所述平衡测量力台套设在所述安装孔内且凸出于所述支撑架的另一侧面,所述法兰边固定在所述支撑架设有导轨的一侧面;所述平衡测量力台内设有力传感器,所述力传感器与所述驱动电路板连接,所述驱动电路板根据所述力传感器反馈的压力信号获得转盘的不平衡量,并控制所述自动平衡调节机构对不平衡量进行调整。
30.采用上述进一步方案的有益效果是:能够对转盘的驱动装置进行装配支撑的同时,还能对转盘的不平衡量进行测量。
31.进一步,所述支撑架的前端设有用于对所述转盘进行限位的限位机构,所述限位机构包括壳体、限位按钮和释放按钮,所述限位按钮包括按钮段、限位段和锁销段,所述限位段位于所述壳体内且两端分别与所述按钮段和锁销段连接,所述按钮段和锁销段分别穿设在所述壳体的两相对侧壁上;所述限位按钮处于解锁位时,所述按钮段位于所述壳体外部且所述锁销段位于所述壳体内部,所述限位按钮处于锁定位时,所述按钮段位于所述壳体内部且所述锁销段位于所述壳体外部;
32.所述释放按钮穿设在所述壳体上且与壳体弹性连接,所述释放按钮位于壳体内的一端与所述限位按钮活动连接并用于将所述限位按钮在锁定位和解锁位之间切换。
33.采用上述进一步方案的有益效果是:限位机构通过设置限位按钮和释放按钮,能够利用释放按钮对限位按钮进行锁定或释放。限位按钮采用三段式结构,能够利用限位段与释放按钮进行配合实现锁定或解锁,能够利用按压端实现对限位段和锁销段的推送,利用锁销段实现对转盘的有效锁定,结构简单,操作方便,不会卡滞,有利于空间在轨环境下,航天员的操作。
34.进一步,所述限位按钮和释放按钮垂直布置,所述壳体内设有限位板,所述限位板上开设有用于限位按钮穿过的通孔,所述限位按钮的中部通过第一弹性件弹性连接在所述限位板上,所述释放按钮的中部通过第二弹性件弹性连接在所述壳体内;所述限位按钮处于解锁位时,所述第一弹性件处于原始状态,所述第二弹性件处于张紧状态;所述限位按钮处于锁定位时,所述第一弹性件处于压缩状态,所述第二弹性件处于原始状态。
35.采用上述进一步方案的有益效果是:通过设置限位板,方便第一弹性件的连接固定。通过按压释放按钮,使释放按钮向壳体内运动,压缩第二弹性件,解除对限位按钮的锁定,使限位按钮在第一弹性件的复原力作用下复位,使锁销段收回到壳体内,即能够解除对转盘的锁定;利用限位按钮进行锁定时,可以通过按压限位按钮使限位按钮的锁销段从壳体伸出对转盘进行锁定,此时,释放按钮在第二弹性件的复原力作用下对限位段进行锁定。
36.进一步,所述壳体内设有释放按钮装配槽,所述释放按钮穿过所述释放按钮装配槽并与所述限位按钮的限位段活动连接;所述释放按钮装配槽内设有第二弹性件,所述第二弹性件的一端与所述释放按钮连接,另一端与所述释放按钮装配槽连接。
37.采用上述进一步方案的有益效果是:通过设置释放按钮装配槽,便于将释放按钮通过第二弹性件弹性装配在壳体上。
38.进一步,所述限位段上开设有限位释放孔,所述限位释放孔包括一体连通的限位孔和释放孔,所述限位孔为沿所述限位按钮按压方向布置的长孔,所述释放孔为圆孔,所述圆孔的直径大于所述长孔的宽度;所述释放按钮的一端为与所述圆孔适配的圆柱体,所述释放按钮的中部为与所述限位孔适配的杆体。
39.采用上述进一步方案的有益效果是:通过设置限位释放孔,便于与释放按钮配合进行锁定或释放。
40.一种空间实验柜体,包括所述的空间在轨离心机,还包括柜本体以及铰接在所述柜本体敞口端的柜门,所述柜门与柜本体的门框锁合;所述柜本体的内侧壁上设有与所述导轨适配的滑槽,所述空间在轨离心机通过导轨与滑槽配合可插拔的设置在所述柜本体的内侧壁上,并与柜本体可拆卸连接;所述柜本体上还设有与所述转子控制器以无线传能方式进行通信的定子控制器。
41.本发明的有益效果是:本发明的空间实验柜体,通过设置柜门,该柜门能够在很大程度上对气流、噪声、温度、emc等相关环境问题起到屏蔽作用,当柜体内实验设备旋转或者运动时关闭柜门可以保护柜内设备,也给航天员在轨操作提供了安全保障。柜本体内的离心机能够为科学实验模块提供0.01g~2g模拟重力环境,能够为在轨离心实验提供支持。
42.进一步,所述空间在轨离心机为两个,且分别对称布置在所述柜本体的两个相对内侧壁上。
43.采用上述进一步方案的有益效果是:通过设置两个离心机,能够抵消运动的扰动量。
附图说明
44.图1为本发明空间旋转驱动装置的主视结构示意图;
45.图2为本发明空间旋转驱动装置的剖视结构示意图;
46.图3为本发明工装与电机定子、电机转子配合装配的剖视结构示意图。
47.图4为本发明空间在轨自动平衡调节机构的立体结构示意图;
48.图5为本发明空间在轨自动平衡调节机构的底部结构示意图;
49.图6为图5中a部的放大结构示意图;
50.图7为本发明图6中的j-j剖视结构示意图;
51.图8为本发明驱动组件的结构示意图;
52.图9为图8的剖视结构示意图;
53.图10为本发明图6中的e-e剖视结构示意图;
54.图11为本发明的转盘组件上侧面的结构示意图。
55.图12为本发明定子支撑组件的立体结构示意图一;
56.图13为本发明定子支撑组件的立体结构示意图二;
57.图14为本发明平衡测量力台的主视结构示意图;
58.图15为本发明限位机构的立体结构示意图;
59.图16为本发明限位机构处于锁定位时的内部结构示意图;
60.图17为本发明限位机构处于解锁位时的内部结构示意图;
61.图18为本发明限位机构的限位按钮分体状态的内部结构示意图;
62.图19为本发明限位机构的释放按钮分体状态的剖视结构示意图;
63.图20为本发明限位机构的释放按钮组装状态的剖视结构示意图;
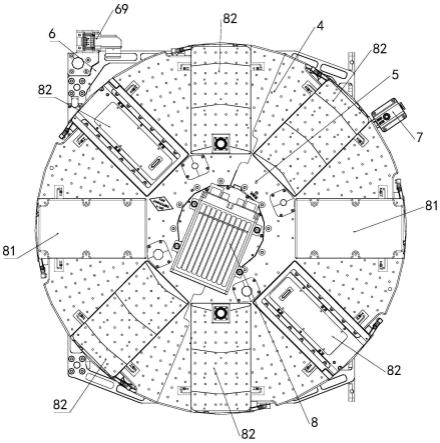
64.图21为本发明离心机的俯视结构示意图;
65.图22为本发明空间实验柜体打开状态的主视结构示意图。
66.附图中,各标号所代表的部件列表如下:
67.100、空间在轨离心机;200、柜本体;300、柜门;301、门框;
68.1、环形导轨;11、齿圈;12、内环边缘;13、外环边缘;
69.2、平衡块组件;21、平衡运动件;211、盖板;212、运动板;213、同心轮;214、偏心轮;22、接线盒;221、霍尔传感器;222、电缆固定孔;23、驱动组件;231、驱动电机;232、蜗轮;233、蜗杆;234、驱动齿轮;235、轴承;2351、轴承座;2352、孔用挡圈;2353、联轴器;236、轴承外盖板;237、拧紧螺钉;238、蜗轮轴;239、拧紧螺母;230、挡圈;2301、键;24、机械限位块;25、电缆支架;
70.3、润滑组件;31、润滑座;32、润滑块;33、弹簧;34、卡槽;
71.4、转盘;41、第一起点限位磁钢;42、第一终点限位磁钢;43、第二起点限位磁钢;44、第二终点限位磁钢;45、第一起点限位柱;46、第一终点限位柱;47、第二起点限位柱;48、第二终点限位柱。
72.5、驱动装置;50、驱动电路板;501、l型支架;51、电机转子;52、电机定子;53、轴承内圈;54、轴承外圈;55、中心转盘;551、安装法兰;56、支撑环;561、内支撑环;562、外支撑环;563、连接杆;57、磁感应齿圈;571、磁感应读数头;572、止口凸台;58、无线传能发射端;581、无线传能接收端;582、耦合器外壳;583、传能盖板;584、止口;59、工装;590、支撑筒。
73.6、支撑架;600、平衡测量力台;601、法兰边;602、力传感器;603、定子装配孔;61、前端连接螺栓;62、中间连接螺栓;621、第一导向座a;63、中前连接螺栓;631、第一导向座b;64、中后连接螺栓;641、第一导向座c;65、后端连接螺栓;651、第二导向座;66、导轨;67、定子装配孔;68、连接筋;681、斜支撑筋;69、电连接器;
74.7、限位机构;71、壳体;711、限位板;712、通孔;713、释放按钮装配槽;714、铜套;72、限位按钮;721、按钮段;722、限位段;723、锁销段;724、限位孔;725、释放孔;726、第一板体;727、第二板体;73、释放按钮;731、锁定螺母;732、杆体;74、第一弹性件;75、第二弹性件;76、连接板;77、支撑杆;
75.8、转子控制器;81、科学实验载荷;82、载荷接口;83、定子控制器。
具体实施方式
76.以下结合附图对本发明的原理和特征进行描述,所举实例只用于解释本发明,并非用于限定本发明的范围。
77.实施例1
78.如图1~图21所示,本实施例的一种空间在轨离心机,包括支撑架6、驱动装置5、自动平衡调节机构、平衡测量力台600、转子控制器8和转盘4,所述转子控制器8以及所述自动平衡调节机构分别安装在所述转盘4上,所述转子控制器8用于为转盘4上的科学实验载荷81提供电控,所述转子控制器8通过无线传能方式与定子控制器8连接;所述支撑架的一侧面上设有沿前后方向布置的导轨,所述平衡测量力台600中部具有定子装配孔603并安装在所述支撑架6的另一侧面中部,所述驱动装置5底部的定子端装配在所述定子装配孔603内,所述驱动装置5底部的定子端还安装有驱动电路板50,所述驱动装置5顶部的转子端与所述转盘4固定连接;所述驱动电路板50分别与所述自动平衡调节机构、驱动装置5和平衡测量力台600连接。
79.本实施例的转盘4通过螺钉固定安装在驱动装置5的转子端,本实施例的驱动装置5的定子端通过螺钉固定安装在支撑架6的定子装配孔67内。本实施例的空间在轨离心机在运转时,利用转盘上由于科学实验载荷的更换或科学实验的进行可能引起驱动装置的转子端质心变化,为减小对自身以及空间站的扰动,可以采用平衡测量力台检测转盘的不平衡量,当检测到的不平衡量超过阈值时,驱动电路板根据不平衡量控制自动平衡调节机构运行,采用迭代调控方式,直到实现平衡调节指标。
80.如图21所示,本实施例的转盘上可以设置载荷接口82,用来装配科学实验载荷81。
81.本实施例的所述支撑架6的后端设有作为离心机电控接口的电连接器69。转子控制器结构设计采用openvpx标准的3u板卡插卡机箱结构,机箱内部设计2类电源板、测控板、以太网交换板、供电开关板。转子控制器为载荷提供电源、控制通讯接口及以太网接口,实现科学实验载荷实验所需的变重力加速度控制,收集载荷实验数据并进行传输下行。转子控制器为转盘上的科学实验载荷进行电控,具体可以通过oc程控指令控制标准实验单元加断电;通过ad采集标准实验单元需要监测的重要遥测信号;通过rs422发送数据注入、实验控制指令给科学实验单元;科学实验单元返回反映工作状态的的工程数据;通过以太网传输科学实验单元在轨实验期间产生的科学数据。
82.本实施例的转盘上设有汇流母板,汇流母板通过电缆连接器与转子控制器连接,汇流母板为转盘上的科学实验载荷和加速度计组件提供电控接口,即可将科学实验载荷的连接器出线等直接与汇流母板进行焊接,实现转子控制器对科学实验载荷的电控连接。
83.本实施例的离心机在使用时,转盘上可以设置科学实验载荷,转盘上还设置的转子控制器为科学实验载荷进行电控,并利用转子控制器与定子控制器无线传能的载波通信方式实现无线数据传输。定子控制器可以安装在空间实验柜体的柜本体内侧壁上。离心机的测控指令、数据的输入输出来源于空间实验柜体上的控制系统或者定子控制器,基于离心机转盘旋转工作的特性,转子控制器与定子控制器以及控制系统之间不能进行有线通信,而是借助于无线传能的载波通信方式实现无线数据传输。转子控制器的数据注入、数据指令、工程数据以及科学数据信息流具体实现如下:(a)转子控制器的数据注入、指令必须由定子控制器转发。定子控制器安装在空间实验柜体的内侧壁上。时间码、数据注入、在轨紧急消息、工程参数采集指令和科学实验控制指令由定子控制器通过以太网发送给空间实验柜体上的控制系统,控制系统通过以太网发送给无线传能,经由无线传能的载波通信方式到达转子控制器。(b)转子控制器通过rs422收集科学实验单元工程数据,与转子自身工程数据打包后通过以太网发送给无线传能,经由无线传能的载波通信方式后,通过以太网发送给空间实验柜体上的控制系统。
84.本实施例的一种空间在轨离心机的工作过程为,离心机接收到定子控制器的控制指令,定子控制器通过连接器将转盘控制指令传输至驱动电路板,驱动电路板控制驱动装置运行,驱动装置带动转盘转动,转盘转动的过程中,可以利用自动平衡调节机构实时调控平衡量,还可以利用磁感应齿圈和磁感应读数头配合进行转速控制;定子控制器通过连接器将载荷控制指令通过无线传能发射端和无线传能接收端发送至转子控制器,进而实现转子控制器与科学实验载荷之间的电控,科学实验载荷的实验数据结果经转子控制器通过无线传能,传输给定子控制器,最终传回地面。
85.本实施例的空间在轨离心机,在总体布局上采用模块化和区域化思想,利用支撑
架布局在离心机的最底部作为离心机驱动装置的机械支撑,也可作为与柜体之间电源、信息等的联接枢纽;利用驱动装置对转盘进行驱动,并利用自动平衡调节机构为转盘的平衡运动进行调节,以适应实验模块更换等状态变化引起的转盘平衡变化。本实施例的空间在轨离心机能够为科学实验模块提供0.01g~2g模拟重力环境,还能够为变重力科学实验模块提供能在轨便捷更换的机械接口;转盘上能够支持多种标准实验模块,并可组合使用。
86.实施例2
87.在实施例1的基础上,本实施例提供了一种驱动装置的具体方案,如图1~图3所示。
88.本实施例的所述驱动装置包括驱动电路板50、电机转子51、电机定子52、轴承、中心转盘55、支撑环56、无线传能发射端58和无线传能接收端581,所述轴承位于所述支撑环56的顶部内侧且轴承外圈54与支撑环56的顶部内侧壁固定连接,所述电机转子51位于所述轴承的内侧且与轴承内圈53固定连接;所述电机定子52套设在所述电机转子51的内侧且与支撑环56的固定连接;所述驱动电路板50安装在所述支撑环56的底部并与所述电机定子52连接,所述电机转子51与所述中心转盘55固定连接;所述无线传能发射端58固定在所述电机定子52的顶部,所述无线传能接收端581与所述中心转盘55固定连接。
89.如图1~图3所示,本实施例的驱动装置还包括磁感应齿圈57和磁感应读数头571,所述磁感应读数头571安装在所述驱动电路板50的上表面,所述磁感应齿圈57安装在所述电机转子51的下法兰面上,所述磁感应齿圈57与所述电机转子51同轴布置,所述磁感应齿圈57的齿端面与所述磁感应读数头571间隔布置。通过将磁感应齿圈安装在电机转子的下法兰面上,缩小了轴向尺寸,减小了装配空间,能够使磁感应齿圈和磁感应读数头更好的与驱动电路板进行配合,结构更加紧凑稳定。
90.本实施例的磁感应齿圈57的材料可采用导磁材料,并做磷化防锈处理。本实施例的轴承可采用含油润滑薄壁双列角接触球轴承,满足使用长寿命要求。轴承内圈和轴承外圈之间的保持架为多孔聚酰亚胺材料。
91.如图1~图3所示,本实施例的所述驱动电路板50上设有l型支架501,所述磁感应读数头571安装在所述l型支架501上。由于磁感应读数头与磁感应齿圈之间的装配精度要求高,必须保证齿端面与磁感应读数头之间的预设间距,结构设计考虑安装工艺,采用l型支架,先将磁感应读数头安装在l型支架上,再将l型支架安装在驱动电路板上,有利于调整磁感应读数头在l型支架上的位置,进而调整磁感应读数头与磁感应齿圈的齿端面之间的距离。
92.如图2所示,本实施例的所述磁感应齿圈57的上表面设有止口凸台572,所述电机转子51的底面和外侧面适配安装在所述止口凸台572上。通过设置止口凸台,保证电机转子与磁感应齿圈同轴布置。
93.如图2和图3所示,本实施例的所述中心转盘55呈圆筒状结构,所述中心转盘55的底部位于所述轴承的内侧且与电机转子51固定连接,所述中心转盘55的顶部位于所述轴承以及所述支撑环56的上方,所述中心转盘55的外侧壁上设有一圈安装法兰551。采用圆筒状结构的中心转盘,方便电机定子和电机转子之间的装配固定,可以利用中心转盘外侧壁上的安装法兰来安装转盘。
94.如图2和图3所示,本实施例的所述支撑环56包括内支撑环561和外支撑环562,所
述内支撑环561与所述外支撑环562同轴布置且通过连接杆563固定在外支撑环562的内侧,所述电机定子52位于内支撑环561的上方且与所述内支撑环561固定连接,所述轴承位于所述外支撑环562的顶部内侧且轴承外圈54与外支撑环562的顶部内侧壁固定连接。采用外支撑环和内支撑环,方便与电机定子和轴承分别进行连接固定。
95.如图2所示,本实施例采用电磁感应技术的无线传能方案取代导电滑环,无线电能传输技术是通过电磁场在没有直接接触的情况下传输电能,不再受限于接触式传输的低速状态、摩擦损耗和环境污染等,避免了传统的导电滑环进行定转子电能传输满足不了空间站长寿命要求。
96.如图2所示,本实施例的所述无线传能接收端581外部设有耦合器外壳582和传能盖板583,所述传能盖板583与中心转盘55止口584搭接且通过螺钉固定连接,有利于装配结构的紧凑稳定。
97.本实施例中的无线传能发射端安装在离心机的定端,通过松不脱螺钉固定在电机定子上法兰面上,无线传能接收端安装在离心机的转子端,通过松不脱螺钉安装在中心转盘上。
98.本实施例的无线传能发射端和无线传能接收端的功能为电能转换(100v转28v)、无线传输(通过耦合电磁场实现非接触式电能传输)、稳压输出(反馈及控制算法)、rs422通信(接受配电主控电路的开关指令,并返回电压、电流等工参)、近距离非接触通信(向转子提供100/1000baset通信接口)等。
99.本实施例的驱动电路板除了接收人机交互系统指令输入,还要接收和计算动平衡测量系统数据,控制电机转子的转速。驱动电路板可采用三相桥式驱动电路,驱动电路板的主控制器通过磁感应读数头获取磁感应齿圈的齿数,进而控制电机转子的转速。
100.本实施例的驱动装置的工作原理为,驱动装置的驱动电路板通过驱动电机定子使电机转子旋转,磁感应读数头获取磁感应齿圈的齿数并传输至驱动电路板,驱动电路板根据齿数控制电机转子的转速,将转速数据传输给定子控制器,定子控制器通过无线传能发射端到无线传能接收端,再传输到转子控制器,利用转子控制器控制中心转盘的转速。
101.上述驱动装置的组装方法,包括以下步骤:
102.s1,将电机定子52与支撑环56底部固定连接;
103.s2,将电机转子51与中心转盘55固定连接,将电机转子51与轴承的轴承内圈53固定连接;
104.s3,将工装59顶部与中心转盘55顶部固定连接,工装59一侧面上设有支撑筒590,将支撑筒590的外侧壁与电机定子52的内圈配合套入到位,即实现将电机转子51套设在电机定子52的外周侧;
105.s4,将支撑环56与轴承的轴承外圈54固定,再用顶丝将工装59顶出。
106.由于本实施例驱动装置的电机定子和电机转子是分体结构,电机转子和电机定子之间存在作用力,采用带有支撑筒的工装,能够对其进行快速装配,而且装配精度高,结构稳定。
107.实施例3
108.在实施例1或实施例2的基础上,本实施例提供了一种自动平衡调节机构的具体方案。
109.如图4~图11所示,本实施例的自动平衡调节机构包括环形导轨1和平衡块组件2,所述环形导轨1同轴装配在所述转盘4上;所述平衡块组件2包括平衡运动件21、驱动组件23和接线盒22,所述接线盒22与所述驱动电路板50连接,所述驱动组件23与所述平衡运动件21连接,所述接线盒22与所述驱动组件23连接,所述平衡运动件21设置在所述环形导轨1上且能够在所述驱动组件23的驱动下沿所述环形导轨1运动;所述接线盒22上设有霍尔传感器221,所述接线盒22根据霍尔传感器221获得的限位信号控制所述驱动组件23运行,所述接线盒22还根据所述驱动电路板50的平衡量调节指令控制所述驱动组件23运行。本实施例的所述自动平衡调节机构的环形导轨固定安装在所述转盘4的上侧面上,所述转盘4的上侧面设有与所述霍尔传感器221对应布置的限位磁钢,当所述平衡块组件2运动至限位磁钢所在位置,所述霍尔传感器221与所述限位磁钢配合并获得限位信号。本实施例的空间在轨转盘组件,通过在转盘上设置磁钢,当平衡块组件运动至使霍尔传感器与磁钢对应的时候,霍尔传感器获得限位信号。
110.本实施例的自动平衡调节机构,通过设置环形导轨和平衡块组件,并通过在接线盒上设置霍尔传感器,能够根据霍尔传感器获得的限位信号对驱动组件进行运行控制,例如可以对驱动组件进行启停控制或进行正反转控制。
111.本实施例的一个优选方案为,所述霍尔传感器221为两个,两个所述霍尔传感器221沿所述环形导轨1的径向间隔布置。所述限位磁钢包括终点限位磁钢和起点限位磁钢,所述终点限位磁钢和起点限位磁钢分别与所述转盘上的两个所述霍尔传感器一一对应配合。通过设置两个径向间隔布置的霍尔传感器,在获得限位信号的时候相互之间不干扰,能够对平衡块组件实现起点限位和终点限位。通过设置起点限位磁钢和终点限位磁钢,能够对平衡块组件运动的起点位置和终点位置进行限位,使平衡块组件在起点位置和终点位置之间来回循环运动,进行平衡量调整。
112.如图4和图5所示,本实施例的一个优选方案为,所述平衡块组件2为两个,两个所述平衡块组件2的底壁上分别设有机械限位块24,两个所述机械限位块24均位于所述环形导轨1的外环侧,其中一个机械限位块24与所述环形导轨1的外环边缘的距离大于另一个机械限位块24与所述环形导轨1的外环边缘的距离。两个机械限位块各自所在的圆周不重合。通过设置两个平衡块组件,能够对旋转装置的平衡量进行有效调节。
113.如图6和图7所示,本实施例中,所述驱动组件23包括驱动电机231、蜗轮232、蜗杆233和驱动齿轮234,所述驱动电机231与所述接线盒22连接,所述环形导轨1上设有齿圈11,所述驱动电机231安装在所述平衡运动件21上,所述蜗轮232、蜗杆233和驱动齿轮234均位于所述平衡运动件21的内侧,所述蜗轮232转动连接在所述平衡运动件21上,所述驱动电机231的输出轴与蜗杆233连接,所述蜗杆233与蜗轮232啮合,所述驱动齿轮234与所述蜗轮232同轴连接且与所述齿圈11啮合。采用蜗轮蜗杆驱动机构,驱动组件结构紧凑,能够实现平衡运动件的自动驱动运行,有利于平衡量调节过程的稳定。
114.具体的,如图6和图7所示,本实施例的所述蜗杆233的两端分别通过轴承235转动安装在所述平衡运动件21的内侧壁上;所述齿圈11位于所述环形导轨1的外环边缘13上,所述蜗轮232和驱动齿轮234分别位于所述环形导轨1的外环侧,所述驱动电机231位于所述环形导轨1的内环侧,所述蜗杆233位于所述环形导轨1的上方或下方。驱动组件与平衡块组件相互配合,结构紧凑稳定,有利于平衡块组件沿环形导轨的平稳运行。
115.具体的,如图8和图9所示,本实施例的驱动电机231和蜗杆233通过联轴器2353连接,两个轴承235上分别设有轴承座2351和孔用挡圈2352,本实施例的轴承235可采用角接触球轴承,两个角接触球轴承背靠背安装在平衡块组件2上,位于环形导轨1内环侧的轴承235装配完成后直接装配在蜗杆233上即可,位于环形导轨外环侧的轴承235装配完成后还通过拧紧螺母239、拧紧螺钉237和轴承外盖板236与盖板211拧紧固定,由于盖板211位于运动板212的外侧,受作用力较大,通过轴承外盖板236能够加强轴承结构的稳定性。
116.如图8所示,本实施例的蜗轮232中心的蜗轮轴238的键槽内放置有键2301,将蜗轮232压入到蜗轮轴238上,再将驱动齿轮234压入到蜗轮轴238上,用挡圈230将驱动齿轮234与蜗轮轴238固定。
117.如图6和图9所示,本实施例的自动平衡调节机构还包括润滑组件3,所述润滑组件3设置在所述平衡运动件21的内侧;所述润滑组件3包括润滑座31和润滑块32,所述润滑座31固定在所述平衡运动件21的内侧壁上,所述润滑块32连接在所述润滑座31上且与所述环形导轨1的内环边缘12或外环边缘13接触。通过设置润滑组件,有利于对环形导轨的润滑,避免平衡运动件沿环形导轨运行出现卡滞等。
118.本实施例的一个优选方案为,如图6和图10所示,本实施例的所述润滑组件3为两个,两个所述润滑组件3的润滑块32分别与所述环形导轨1的内环边缘12和外环边缘13接触;所述润滑块32弹性连接在所述润滑座31上;所述润滑块32包括浸油的聚酰亚胺。通过设置两个润滑组件,能够对环形导轨的内环侧和外环侧都进行润滑。润滑块弹性连接在润滑座上,能够使润滑块紧贴环形导轨,并且在润滑块有磨损的时候,仍然能够贴合环形导轨的表面。采用浸油的聚酰亚胺作为润滑件,聚酰亚胺作为多孔润滑材料,避免了传统毛毡润滑带来的润滑油容易挥发和污染的风险。
119.如图10所示,本实施例的所述润滑块32上设有v型的卡槽34,用于与环形导轨1的内环边缘12和外环边缘13适配卡接。
120.具体的,如图10所示,本实施例的润滑块32通过弹簧33弹性连接在润滑座31上,弹簧33放置在润滑座31的底部上,其作用是使润滑块32能够紧贴环形导轨1上,并且在润滑块32有磨损时仍然能够贴合环形导轨1的内环边缘12和外环边缘13上,放置润滑块32时,确保润滑块32在润滑座31内顺畅不卡滞。
121.如图5和图6所示,本实施例的所述平衡块组件2能够在环形导轨1上顺时针或逆时针运动。所述平衡运动件21包括盖板211、运动板212、同心轮213和偏心轮214,本实施例的所述同心轮213和偏心轮214转动安装在所述运动板212上,所述同心轮213和偏心轮214分别转动设置在所述环形导轨1的两侧,所述同心轮213位于所述环形导轨1的内环侧并与所述环形导轨1的内环边缘12转动接触,所述偏心轮214位于所述环形导轨1的外环侧并与所述环形导轨1的外环边缘13转动接触;同心轮213通过螺钉螺母固定在运动板212上,拧紧使同心轮213靠近环形导轨1内侧,拧紧使偏心轮214靠近环形导轨1外侧。优选的,所述环形导轨1的外环侧设有两个偏心轮214,所述环形导轨1的内环侧设有两个同心轮213。所述盖板211通过螺钉安装在所述运动板212的外侧,盖板211的设置避免了平衡块组件运动时蜗轮蜗杆或驱动齿轮夹上操作者的危险。本实施例的盖板211可采用钨钢块盖板,运动板212可采用钨钢板。环形导轨1上的两个平衡块组件2的盖板211底部均设有机械限位块24,一个机械限位块24靠近内圈,一个机械限位块24靠近外圈,两个机械限位块24用于两个平衡块组
件2在环形导轨1上起点和终点的限位,当霍尔传感器的软限位失效后,可利用机械限位块24进行限位。
122.如图6所示,本实施例的接线盒22内设有安装槽,用于装配霍尔传感器221,接线盒22上还设有电缆固定孔222,用于电缆穿过。通过设置两个霍尔传感器221,避免了两个平衡块组件2上的两个霍尔传感器221在圆周方向运动不干扰。接线盒22内设有驱动电路板,驱动电路板与霍尔传感器221和驱动电机231连接,驱动电路板通过螺钉与接线盒连接,驱动电路板根据霍尔传感器221获得的限位信号能够控制驱动电机231的旋转方向,还能够控制驱动电机231的步数等,进而能够起到调整平衡量的作用。
123.本实施例的自动平衡调节机构的工作过程为,可将环形导轨安装在旋转设备(例如离心机)上,平衡块组件能够在驱动组件的驱动下在环形导轨上进行圆周运动。接线盒接收到指令后发送命令给驱动电机,驱动电机根据指令进行正反转,同时带动蜗杆正反转,蜗杆和蜗轮啮合运动,最终驱动齿轮沿着环形导轨的齿圈运动,通过改变平衡块组件的位置,调节不平衡量,达到合适位置后,整个旋转组件达到平衡状态,平衡块组件停止运动。
124.如图11所示,本实施例的一个优选方案为,所述转盘4的上侧面设有与平衡块组件2底壁上的机械限位块24配合的起点限位柱和终点限位柱,所述起点限位磁钢和终点限位磁钢位于所述起点限位柱和终点限位柱之间,所述起点限位磁钢邻近所述起点限位柱布置,所述终点限位磁钢邻近所述终点限位柱布置。将起点限位磁钢和终点限位磁钢布置在起点限位柱和终点限位柱之间,一般情况下,只需要限位磁钢与霍尔传感器感应进行软限位即可,机械限位不起作用。当软限位失效时,可以利用机械限位块和限位柱配合进行机械限位。
125.对于优选采用两个平衡块组件2的方案,如图11所示,本实施例的起点限位磁钢为两个且错位布置互不干扰,分别为第一起点限位磁钢41和第二起点限位磁钢43;终点限位磁钢为两个且错位布置互不干扰,分别为第一终点限位磁钢42和第二终点限位磁钢44;本实施例的起点限位柱为两个且错位布置互不干扰,分别为第一起点限位柱45和第二起点限位柱47,第一起点限位柱45位于第二起点限位柱47圆周方向的内环侧,使两个平衡块组件2在运动起点限位时互不干扰;终点限位柱为两个且错位布置互不干扰,分别为第一终点限位柱46和第二终点限位柱48,第一终点限位柱46位于第二终点限位柱48圆周方向的内环侧,使两个平衡块组件2在运动终点限位时互不干扰。
126.本实施例的转盘4上设有环形的电缆槽,环形的电缆槽与环形导轨1同心布置,所述接线盒22上设有电缆支架25,接线盒22内的电缆通过电缆支架25与转盘4上的电缆槽中的电缆连接。
127.本实施例的一种自动平衡调节机构采用移动平衡质量块方法来抵消转盘组件上的不平衡力和不平衡力偶。可以利用平衡测量力台上的力传感器受转盘上载荷不平衡所产生的离心力产生电荷,经驱动电路板上的加法器按通道汇集,经电荷放大器将电荷信号放大并转化为电压信号,数采系统将模拟电压信号转化为数字信号得到不平衡力的大小;当检测到不平衡量超过阈值时,控制系统解算出执行机构平衡块的目标位置;执行机构运动至目标位置;逼近法测试并验证调节结果,若不满足则继续调节,直到实现平衡调节指标,不平衡力残余≯2.5n,不平衡力矩残余≯1.5nm。
128.实施例4
129.在实施例1或实施例2或实施例3的基础上,本实施例提供了一种支撑架6的具体方案。
130.如图12和图13所示,本实施例的所述支撑架6一侧面的前端、中部以及后端分别设有前端连接螺栓61、中部连接螺栓和后端连接螺栓65,所述支撑架6一侧面对应中部连接螺栓前侧的位置设有第一导向座,所述支撑架6一侧面对应后端连接螺栓65的前侧位置设有第二导向座651。
131.如图12和图13所示,本实施例的所述中部连接螺栓包括中间连接螺栓62、中前连接螺栓63和中后连接螺栓64,所述中前连接螺栓63和中后连接螺栓64分别位于所述中间连接螺栓62的前侧和后侧,所述中间连接螺栓62的前侧设有第一导向座a621,所述中前连接螺栓63的前侧设有第一导向座b631,所述中后连接螺栓64的前侧设有第一导向座c641。通过设置中前连接螺栓和中后连接螺栓,有利于支撑组件的稳定连接固定。
132.如图13所示,本实施例的所述导轨66为两个且分别位于所述定子装配孔67的左右两侧,其中一个导轨66为水平方向限位的t型导轨,另一个导轨66为垂直方向限位的u型导轨。通过在定位装配孔的左右两侧分别设置导轨,有利于支撑组件稳定装配在柜体内。采用t型导轨与u型导轨组合式导轨结构,方便插拔。
133.如图12和图13所示,本实施例的所述支撑架6上设有多根连接筋68和多个斜支撑筋681。通过在支撑架上设置连接筋和斜支撑筋,有利于结构的稳定,还减轻了支撑架的重量。
134.如图12~图14所示,本实施例的所述支撑架6中部设有安装孔,所述平衡测量力台600的一侧具有一圈法兰边601,所述平衡测量力台600套设在所述安装孔内且凸出于所述支撑架6的另一侧面,所述法兰边601固定在所述支撑架6设有导轨66的一侧面。所述平衡测量力台600内设有力传感器602,所述力传感器602与所述驱动电路板50连接,所述驱动电路板50根据所述力传感器602反馈的压力信号获得转盘4的不平衡量,并控制所述自动平衡调节机构的平衡块组件2在环形导轨1上运动以对不平衡量进行调整。通过设置平衡测量力台,能够对转盘的驱动装置进行装配支撑的同时,还能对转盘的不平衡量进行测量。
135.如图12和图13所示,本实施例的所述支撑架6的前端设有用于对离心机的转盘4进行限位的限位机构7。通过设置限位机构,有利于对支撑架上的转盘进行有效限定。
136.如图15~图20所示,本实施例的所述限位机构7包括壳体71、限位按钮72和释放按钮73,所述限位按钮72包括按钮段721、限位段722和锁销段723,所述限位段722位于所述壳体71内且两端分别与所述按钮段721和锁销段723连接,所述按钮段721和锁销段723分别穿设在所述壳体71的两相对侧壁上,具体可在壳体71的两相对侧壁上设置铜套714,将按钮段721和锁销段723分别穿设在对应的铜套714内,利用铜套714可以进行导向以及起到减小摩擦力的作用;所述限位按钮72处于解锁位时,所述按钮段721位于所述壳体71外部且所述锁销段723位于所述壳体71内部,所述限位按钮72处于锁定位时,所述按钮段721位于所述壳体71内部且所述锁销段723位于所述壳体71外部;所述释放按钮73穿设在所述壳体71上且与壳体71弹性连接,所述释放按钮73位于壳体71内的一端与所述限位按钮72活动连接并用于将所述限位按钮72在锁定位和解锁位之间切换。本实施例的限位机构的限位按钮采用按钮段、限位段和锁销段三段式结构,方便组装,也有利于弹性件等结构的连接固定。
137.如图15~图20所示,本实施例的所述壳体71内设有限位板711,所述限位板711上
开设有用于限位按钮72穿过的通孔712,所述限位按钮72的中部通过第一弹性件74弹性连接在所述限位板711上,所述释放按钮73的中部通过第二弹性件75弹性连接在所述壳体71内。所述第一弹性件74和所述限位按钮72的锁销段分别位于所述限位板的两侧,通过设置限位板,通过开设通孔,有利于限位按钮在壳体内的稳定连接,而且限位板能够方便第一弹性件的连接固定。
138.如图15~图20所示,本实施例的本实施例的所述限位按钮72处于解锁位时,所述第一弹性件74处于原始状态,所述第二弹性件75处于压缩状态;如图2所示,所述限位按钮72处于锁定位时,所述第一弹性件74处于压缩状态,所述第二弹性件75处于原始状态。本实施例的第一弹性件74和第二弹性件75可以分别采用锥簧,以满足结构需要。通过按压释放按钮,使释放按钮向壳体内运动,压缩第二弹性件,解除对限位按钮的锁定,使限位按钮在第一弹性件的复原力作用下复位,使锁销段收回到壳体内,即能够解除对转盘的锁定;利用限位按钮进行锁定时,可以通过按压限位按钮使限位按钮的锁销段从壳体伸出对转盘进行锁定,此时,释放按钮在第二弹性件的复原力作用下对限位段进行锁定。
139.如图13、图15~图20所示,本实施例的一个优选方案为,所述第一弹性件74和第二弹性件75分别采用锥簧。采用锥簧,有利于驱动结构的稳定。
140.如图13、图15~图20所示,本实施例的一个具体方案为,所述释放按钮73和所述第一弹性件74分别位于所述限位板711的两侧,所述第一弹性件74的一端与所述按钮段721抵接,另一端与所述限位板711抵接。通过按压限位按钮的按压段,便于第一弹性件被压缩。
141.如图13、图15~图20所示,本实施例的一个优选方案为,所述限位段722采用板体结构,所述限位段722包括相互连接的第一板体726和第二板体727,所述第一板体726的宽度大于所述第二板体727的宽度,所述第一板体726位于所述限位板711的一侧并能够对限位板711抵接,所述第二板体727适配穿设在所述通孔712内;所述释放按钮73位于壳体71内的一端与所述限位段722的第一板体726活动连接并用于将所述限位按钮72在锁定位和解锁位之间切换。采用板体结构,有利于释放按钮与限位段的活动连接。
142.如图19和图20所示,本实施例的一个具体方案为,所述壳体71内设有释放按钮装配槽713,所述释放按钮73穿过所述释放按钮装配槽713并与所述限位按钮72的限位段722活动连接;所述释放按钮装配槽713内设有第二弹性件75,所述第二弹性件75的一端与所述释放按钮73连接,另一端与所述释放按钮装配槽713连接。通过设置释放按钮装配槽,便于将释放按钮通过第二弹性件弹性装配在壳体上。
143.如图12~图20所示,本实施例的一个优选方案为,所述限位按钮72和释放按钮73垂直布置。采用限位按钮和释放按钮垂直布置,有利于锁定和解锁过程的顺利进行。
144.如图13、图15~图20所示,本实施例的一个具体方案为,本实施例的所述限位段722上开设有限位释放孔,所述限位释放孔包括一体连通的限位孔724和释放孔725,所述限位孔724为沿所述限位按钮72按压方向布置的长孔,所述释放孔725的宽度大于所述限位孔724的宽度;所述释放按钮73的一端连接有与所述限位孔724适配的锁定螺母731,所述释放按钮73的中部为与所述限位孔724适配的杆体732。通过设置限位释放孔,便于与释放按钮配合进行锁定或释放。
145.优选的,如图16~图18所示,本实施例的释放孔725可以采用圆孔,圆孔的直径大于所述长孔的宽度。对应的,所述锁定螺母731可以采用圆柱形螺母。
146.具体的,如图15所示,本实施例的限位机构还包括连接板76和支撑杆77,所述连接板76通过支撑杆77固定在所述限位机构7的壳体71上,以使限位机构7布置在支撑架的前端外侧。
147.其中,本实施例的各个连接螺栓可采用松不脱螺栓,便于工作人员操作。
148.本实施例的限位机构的组装方法,包括以下步骤:
149.将壳体71的两个相对侧壁上分别开设装配孔,所述装配孔内设有铜套;
150.将限位段722上套设第一弹性件74,并将限位段722置于壳体71内,使限位段722的两端分别与两个装配孔相对应,如图7所示;
151.将锁销段723和按钮段721分别穿入两个装配孔并分别与所述限位段722的两端固定,如图8所示;
152.将第二弹性件75设置在壳体71上的释放按钮装配槽713内,并将释放按钮73套入第二弹性件75内并穿过释放按钮装配槽713以及限位段722,并在释放按钮73穿入所述壳体71内的一端连接锁定螺母731,如图7和图9所示。本实施例的空间在轨转盘限位机构的组装方法,工艺简单,有利于限位机构的快速装配以及装配后结构的稳定可靠。
153.本实施例的限位机构的工作原理为,通过按压限位按钮72的按钮段721,使限位按钮72沿壳体71轴向运动,将按钮段721按入壳体71内,将锁销段723从壳体71内推出,此时按钮段721挤压壳体71内的第一弹性件74,使第一弹性件74压缩,释放按钮73的杆体732沿限位段722的释放孔725进入到限位孔724中,当锁销段723推出到位后,释放按钮73在第二弹性件75复原力作用下向壳体71外弹出,释放按钮73的锁定螺母731卡入到圆形的限位孔724中,对限位按钮72进行结构限位,避免锁销段723在第一弹性件74复原力作用下回入壳体71内,此时限位按钮72处于锁定位,能够利用伸出壳体71的锁销段723对转盘进行锁定。当需要对转盘解锁时,通过按压释放按钮73,使释放按钮73的锁定螺母731从限位孔724内脱出,使释放按钮73的杆体进入到限位孔724中,并牵拉第二弹性件75,使第二弹性件75压缩,由于释放按钮73的杆体732宽度尺寸小于限位孔724的尺寸,并与释放孔725尺寸适配,此时释放按钮73已经对限位按钮72进行了解锁,在第一弹性件74的弹性复原力作用下限位按钮72的锁销段723缩回到壳体71内,按钮段721从壳体71内向外弹出,释放按钮73的杆体732进入到释放孔725内,由于释放按钮73的锁定螺母731抵接在限位段722的一侧,使释放按钮73被限位在壳体71内,此时第二弹性件75被压缩。本实施例的限位机构主要是用于在轨航天员更换转盘上科学实验模块或维修操作时使转盘临时固定,结构简单可靠,通过按压限位按钮和释放按钮就能够分别实现锁定和解锁,对于空间站操作,十分方便可靠,便于航天员的操作。
154.本实施例通过设置限位机构,有利于对支撑架上的转盘进行有效限定,通过设置限位按钮和释放按钮,能够利用释放按钮对限位按钮进行锁定或释放。限位按钮采用三段式结构,能够利用限位段与释放按钮进行配合实现锁定或解锁,能够利用按压端实现对限位段和锁销段的推送,利用锁销段实现对转盘的有效锁定,结构简单,操作方便,不会卡滞,有利于空间在轨环境下,航天员的操作。
155.本实施例的定子支撑组件,考虑更换和维修方便性,定子支撑组件设计有便于航天员安装和拆卸的松不脱螺栓固定座和插拔离心机的导轨,固定座及两条钛合金导轨作为离心机对外的机械安装接口与柜体主梁安装固定。同时设计拉出把手,方便航天员拆卸维
修整个离心机时将离心机从柜体里拉出来。通过设置前后布置的导轨,能够为支撑架在柜体内的移动推拉提供位置导向;通过设置前端连接螺栓、中部连接螺栓和后端连接螺栓,能够将定子支撑组件有效稳定的支撑固定在空间站柜体内部;通过设置导向座,能够为定子支撑组件的中部和后端连接螺栓的固定连接提供稳定导向。
156.实施例5
157.如图22所示,本实施例的一种空间实验柜体,包括实施例1或实施例2或实施例3或实施例4所述的空间在轨离心机100,还包括柜本体200以及铰接在所述柜本体200敞口端的柜门300,所述柜门300与柜本体200的门框301锁合;所述柜本体200的内侧壁上设有与所述导轨66适配的滑槽,所述空间在轨离心机100通过导轨66与滑槽配合可插拔的设置在所述柜本体200的内侧壁上,并与柜本体200可拆卸连接;所述柜本体200上还设有与所述转子控制器8以无线传能方式进行通信的定子控制器83。
158.如图22所示,本实施例的一个优选方案为,所述空间在轨离心机100为两个,且分别对称布置在所述柜本体200的两个相对内侧壁上。通过设置两个离心机,能够抵消运动的扰动量。
159.本实施例的空间实验柜体,通过设置柜门,该柜门能够在很大程度上对气流、噪声、温度、emc等相关环境问题起到屏蔽作用,当柜体内实验设备旋转或者运动时关闭柜门可以保护柜内设备,也给航天员在轨操作提供了安全保障。柜本体内的离心机能够为科学实验模块提供0.01g~2g模拟重力环境,能够为在轨离心实验提供支持。
160.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
161.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
162.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
163.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
164.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特
点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
165.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
