1.本发明属于医疗设备技术领域,涉及生化分析的新型自动化技术,具体涉及一种模拟胃肠道消化试验系统及方法。
背景技术:
2.人类消化系统的研究是复杂的多阶段过程,当涉及到潜在的有害物质时受到伦理约束,同时体内消化实验周期长,实验结果易受实验体个体差异影响,因此在体外模拟人类消化的生理过程是必要的。相对于活体试验,体外模拟消化系统可以作为“前测试”来预测活体试验情况或优化实验条件,完全代替或部分替代活体试验,达到降低成本和时间、提高重复性和准确性的目的,而且没有伦理方面的限制。体外消化模型已被广泛应用到营养学、毒理学、生理学及微生物学等各领域以及食品、药品、保健品等各个行业,国内外对利用体外消化模型进行相关研究的认可度也越来越高,在药物代谢、污染物生物可及性、食品摄入安全评价等方面的应用越来越受到重视。
3.现有的体外消化模型包括静态模拟消化和动态模拟消化两大类;动态模拟能更准确地表达消化过程中功能成分量的变化,且周期性取样检测具有实时观察量变的特点。但是动态消化模型不易模拟肠胃的蠕动,并且难以清理。
技术实现要素:
4.本发明的目的在于提供一种便于清理且贴近真实的模拟胃肠道消化试验系统及方法。
5.基于上述目的,本发明采用如下技术方案:一种模拟胃肠道消化试验系统,包括消化系统,还包括与消化系统相配合的清理系统;消化系统包括胃消化装置,胃消化装置一端连接有口腔咀嚼装置,另一端连接有肠消化装置。
6.进一步的,肠消化装置包括肠模型,肠模型为软质管状结构;肠模型包括直段,还包括在两个直段之间连接的弯段,弯段均为半圆弧状结构;肠模型外设置有肠蠕动装置;清理系统包括冲洗装置,还包括与肠模型相配合的刷洗装置;刷洗装置包括与弯段相配合的第一刷洗机构,还包括与直段相配合的第二刷洗机构;口腔咀嚼装置包括口腔模型,口腔模型中设置有粉碎机构;胃消化装置包括胃模型,还包括与胃模型相配合的胃蠕动装置。
7.进一步的,肠蠕动装置包括在肠模型的外壁上设置的推动组件,推动组件延肠模型的长度方向均匀分布;每个推动组件均包括绕肠模型的圆周方向均布的推动轮;每个推动轮在其端面的正投影均为凸轮形,每个推动轮的弧面上均开设有闭合的推动槽,每个推动槽的横截面均为弧形;每个推动槽由靠近肠模型的一端到远离肠模型的一端逐渐变窄;每个推动槽的两侧边缘与推动轮的两端面边缘之间均为倾斜的过渡面。
8.进一步的,每个推动组件均包括在每个推动轮上连接的第一转轴,每个第一转轴的两端均固连有锥齿轮,每两个相邻的第一转轴上的锥齿轮均啮合连接;每个推动组件均
包括与其中一个锥齿轮同轴且固连的第二转轴,每个直段上的第二转轴均平行设置且设置在同一侧,每个直段上的第二转轴均连接有同一个驱动机构。
9.进一步的,第一刷洗机构包括与肠模型连接的固定轨道,固定轨道是与弯段同轴设置的圆弧状构件;弯段上开设有第一刷洗口,第一刷洗口处设置有与其相配合的电动门;固定轨道上连接有摆动轨道,摆动轨道上连接有第一伸缩组件,第一伸缩组件上连接有第二伸缩组件;摆动轨道、第一伸缩组件和第二伸缩组件都是与弯段同轴的圆弧状结构。
10.进一步的,摆动轨道上连接有往复摆动机构;往复摆动机构包括与摆动轨道远离第一刷洗口的一端铰接的摆动杆,摆动杆上固连有第三转轴,第三转轴与固定轨道同轴设置;摆动杆上开设有长度方向与其一致的滑槽,滑槽连接有偏心盘;偏心盘包括与滑槽平行的转动圆盘,还包括在转动圆盘上固连的第一滑块,第一滑块是与转动圆盘相垂直的圆柱状结构,第一滑块设置在滑槽内并与滑槽滑动连接;转动圆盘上连接有第二电机。
11.进一步的,每个驱动机构均包括在第二转轴上设置的第一链轮和第二链轮;位于每个直段两端的两个第二转轴上均固连有与其同轴的第一链轮或第二链轮,位于每个直段上的其他第二转轴上均固连有与其同轴的第一链轮和第二链轮,每个第一链轮均设置在第二链轮和锥齿轮之间;每两个相邻的第一链轮之间均连接有链条,每两个相邻的第二链轮之间均连接有链条;每个直段上的其中一个第二转轴上连接有第一电机。每个弯段上的第二转轴均连接有第一电机,通过控制器控制直段与弯段上的第一电机同步转动。
12.进一步的,第一伸缩组件包括在摆动轨道上固连的第一滑轨,第一滑轨上滑动连接有第一齿条,第一齿条与第一滑轨都是与摆动轨道同轴的圆弧状结构;第一齿条啮合连接有第一齿轮,第一齿轮相对第一滑轨转动设置,第一齿轮上连接有第三电机;第二伸缩组件包括与第一齿条固连的第二滑轨,第二滑轨上滑动连接有第二齿条,第二齿条啮合连接有第二齿轮,第二齿轮连接有第四电机;第二齿条的端部固连有第一刷杆,第一刷杆上均布有刷毛;第一刷杆与第二齿条都是和第一滑轨同轴设置的圆弧状结构。
13.进一步的,第一刷杆靠近第二齿条的一端连接有伸缩水管,伸缩水管为螺旋状结构;第一刷杆内开设有与伸缩水管连通的喷水通道,第一刷杆的侧壁上开设有与喷水通道相连通的喷水孔。
14.上述的胃肠道消化试验系统的方法,包括以下步骤,步骤1,添加食物及试剂;在肠胃模型中加入试剂,将食物放入口腔咀嚼装置,粉碎机构将食物粉碎,粉碎后的食物进入胃模型;胃蠕动装置使胃模型蠕动将食物初步消化,初步消化后的食物进入肠模型。
15.步骤2,肠模型蠕动消化食物;肠蠕动装置使肠模型蠕动,促进肠模型消化食物,肠蠕动装置工作过程为:第一电机转动带动与其连接的第二转轴转动,第二转轴转动带动其上的第一链轮和第二链轮转动,第一链轮和第二链轮通过链条带动其余的第一链轮和第二链轮转动,进而带动其余第二转轴转动;第二转轴带动与其连接的锥齿轮转动,锥齿轮带动与其位于同一推动组件的其他锥齿轮和第一转轴转动,第一转轴带动推动轮转动,推动轮上的推动槽挤压肠模型并将肠模型中的食物向后挤压。
16.步骤3,清理消化系统;食物从肠模型挤压出去后,实验完成;使用冲洗装置对口腔模型、胃模型和肠模型进行初步冲洗,将食物残渣冲至消化系统外。
17.随后启动第一刷洗机构对肠模型的弯段进行刷洗,其过程为:第一刷洗口处的电
动门打开,第四电机带动第二齿轮转动,第二齿轮带动第二齿条在第二滑轨上滑动,第二齿条带动第一刷杆与其同步移动,第一刷杆与第二齿条进入弯段中;随后第二电机转动并带动转动圆盘转动,转动圆盘带动第一滑块转动,第一滑块在滑槽内滑动并带动滑槽往复摆动,滑槽带动摆动杆往复摆动,摆动杆带动摆动轨道在固定轨道上往复摆动,摆动轨道带动第一伸缩组件往复摆动,第一伸缩组件带动第二齿条往复摆动,第二齿条带动第一刷杆在肠模型中往复移动刷洗弯段的前部。弯段前部刷洗完毕后,第三电机带动第一齿轮转动,第一齿轮带动第一齿条在第一滑轨上滑动,第一齿条移入弯段中并带动第二齿条与其同步移动,第二齿条带动第一刷杆移动至弯段的后部;第二电机再次转动并带动摆动轨道在固定轨道上往复摆动,摆动轨道带动第一刷杆在弯段后部往复移动,对弯段后部进行刷洗。弯段刷洗完毕后,关闭电动门,第二刷洗机构对肠模型的直段进行刷洗;刷洗完毕后,冲洗装置再次对口腔模型、胃模型和肠模型进行冲洗。
18.与现有技术相比,本发明具有以下有益效果:1、肠蠕动装置和胃蠕动装置可使肠、胃模型模拟人体的肠、胃蠕动情况,使实验更接近真实情况。肠模型与胃模型均设置为软质材料,方便模拟其蠕动动作。将肠清理系统使用冲洗装置与刷洗装置配合使用,可先将大部分废弃物冲洗出消化系统,难以清理的地方再使用刷洗装置进行清理,在保证清理效率的同时又能提高清洁质量。
19.2、将推动轮设置为凸轮形结构,推动轮转动即可挤压肠模型,使肠模型中的食物向前移动;但是若设置一个凸轮挤压肠模型,凸轮只能从肠模型的一个方向挤压肠模型,不能均匀的从四周挤压肠模型,使肠模型中只有靠近凸轮方向的食物才能被挤压而向后移动,远离凸轮一侧的食物难以移动,不能很好的模拟出肠蠕动情况。设置推动槽可以更好的贴合肠模型的外壁,使用多个推动槽从四周包裹肠模型进而可以从四周对肠模型挤压,使肠模型中的食物都能向后移动,使肠模型的蠕动更接近真实情况,更加智能化。推动槽挤压肠模型时,推动槽距离肠模型的中心距离都会变短,为使四个推动槽向肠模型中心挤压时不会发生干涉,设置倾斜的过渡面,将推动槽的宽度逐渐缩小,使推动轮转动挤压肠模型时不会与相邻的推动轮碰撞。
20.3、使用锥齿轮驱动第一转轴和推动轮,使锥齿轮能够带动同一推动组件内的所有第一转轴和推动轮同步转动,使推动轮能够带动推动槽同时从四周挤压肠模型,使肠模型的蠕动更接近真实情况,使试验更加准确。
21.4、设置电动门可将第一刷洗机构与弯段隔开,避免两者相互影响,使试验更加稳定。将固定轨道、摆动轨道、第一伸缩组件和第二伸缩组件都设置为与弯段同轴的圆弧状结构,并且摆动轨道、第一伸缩组件和第二伸缩组件的半径均大于弯段内壁的内径,均小于弯段内壁的外径。使摆动轨道、第一伸缩组件和第二伸缩组件能够稳定进入弯段内,方便稳定对弯段进行刷洗。设置第一伸缩组件和第二伸缩组件可进行两次伸长,可设置较小的弯段直径,节省空间。
22.5、第二电机可通过偏心盘使滑槽往复摆动,进而使滑槽带动摆动轨道往复摆动,使第一伸缩组件和第二伸缩组件往复摆动,进行往复刷洗弯段的动作。第三转轴与固定轨道同轴设置,使摆动杆的摆动中心与摆动轨道相同,使摆动杆能够带动摆动轨道延着固定轨道稳定滑动。
23.6、使用第一链轮、第二链轮和链条将不同的推动组件相互连接,推动组件中的推
动轮同步转动,使推动轮与推动槽同步向后推动食物,使试验更加真实。第二支撑筒、第一支撑筒和摆动轨道的弯曲弧度之和大于180
°
,使第二支撑筒、第一支撑筒和摆动轨道完全伸出后能够对整个弯段进行刷洗(弯段为180
°
)。
附图说明
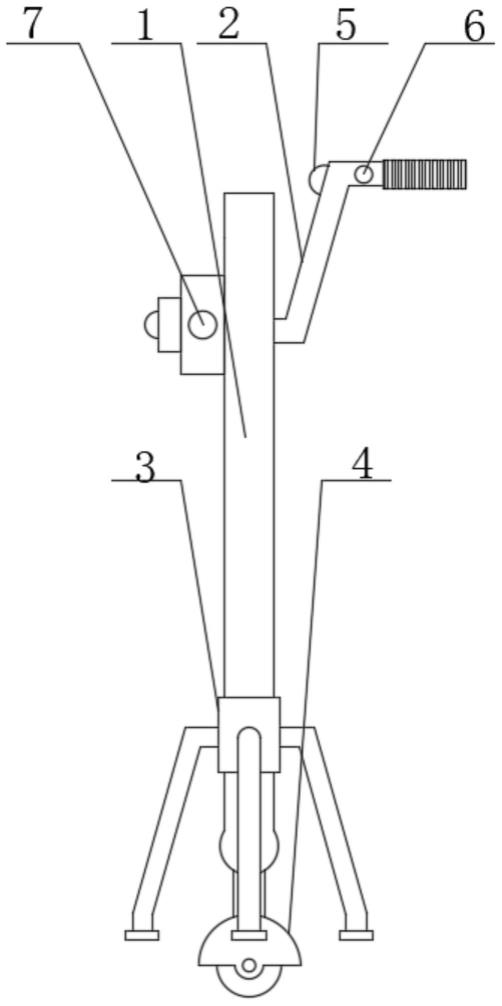
24.图1为本发明实施例1的示意图;图2为本发明实施例1的推动组件的示意图;图3为本发明实施例1的推动轮的正视图;图4为本发明实施例1的驱动机构的示意图;图5为图4的局部放大图;图6为本发明实施例1的第一刷洗机构的示意图;图7为本发明实施例1的固定轨道结构示意图;图8为本发明实施例1的固定轨道内部结构示意图;图9为图8的局部放大图;图10为本发明实施例1的往复摆动机构示意图;图11为本发明实施例1的摆动轨道内部结构示意图;图12为本发明实施例1的第一支撑筒内部结构示意图;图13为图12的局部放大图;图14为本发明实施例1的第二支撑筒内部结构示意图;图15为图14的局部放大图;图16为本发明实施例3的胃蠕动装置示意图;图17为本发明实施例4的第二刷洗机构示意图。
25.图中:肠消化装置1、肠模型2、直段3、弯段4、肠蠕动装置5、第一刷洗机构7、胃消化装置9、口腔咀嚼装置10、推动轮501、推动槽502、过渡面503、第一转轴504、锥齿轮505、第二转轴506、第一链轮507、第二链轮508、链条509、第一电机510、推动轮端面511、固定轨道701、第一刷洗口702、电动门703、摆动轨道704、摆动杆705、第三转轴706、滑槽707、转动圆盘708、第一滑块709、第二电机710、第一滑轨711、第一齿条712、第一齿轮713、第三电机714、第二齿条716、第二齿轮717、第四电机718、第一刷杆719、刷毛720、伸缩水管721、喷水通道722、喷水孔723、限位槽724、铰接座725、支撑座726、第一支撑筒727、第二滑块728、第二支撑筒729、第三滑块730、第二刷杆801、第五电机802、电动伸缩杆803、胃大弯1301、胃体1302、凸轮1401、第六电机1402。
具体实施方式
26.实施例1一种模拟胃肠道消化试验系统,如图1-15所示,包括消化系统,还包括与消化系统相配合的清理系统;消化系统包括胃消化装置9,胃消化装置9前端连接有口腔咀嚼装置10,消化装置后端连接有肠消化装置1。
27.肠消化装置1包括肠模型2,肠模型2在胃模型的后端连接,肠模型2与胃模型之间设置有电磁阀,使用控制器控制电磁阀开闭可控制食物在胃中反应的时间。肠模型2为软质
管状结构;肠模型2包括多个直段3,还包括在每两个直段3之间连接的弯段4,所有弯段4均为半圆弧状结构;肠模型2外设置有肠蠕动装置5。清理系统包括冲洗装置,冲洗装置包括与口腔咀嚼装置10连接的冲洗水管。清理系统还包括与肠模型2相配合的刷洗装置(由于肠模型2难以清理,本发明重点解决肠模型2的刷洗问题);刷洗装置包括与弯段4相配合的第一刷洗机构7,还包括与直段3相配合的第二刷洗机构;口腔咀嚼装置10包括口腔模型,口腔模型中设置有粉碎机构(粉碎机构采用现有技术);胃消化装置9包括胃模型,胃模型为软质囊状结构,胃消化装置9还包括与胃模型相配合的胃蠕动装置。
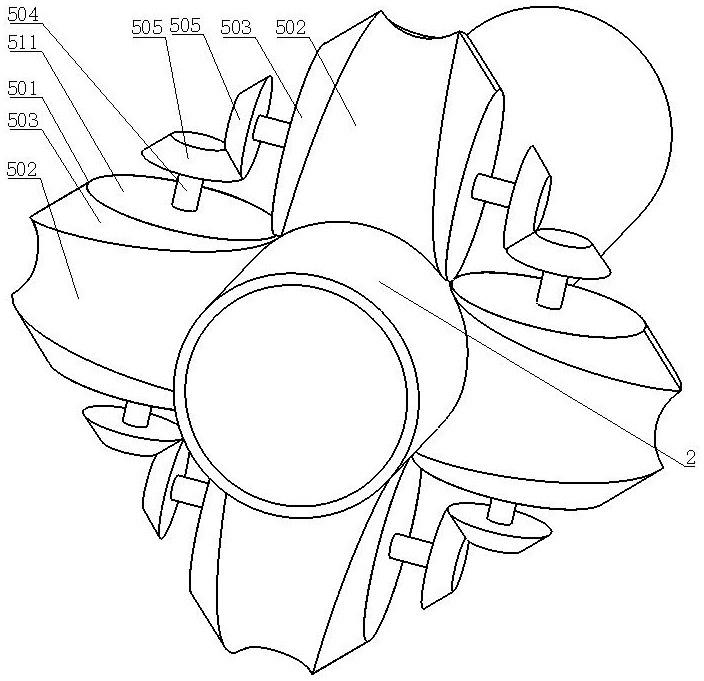
28.如图2-5所示,肠蠕动装置5包括在肠模型2的外壁上设置的推动组件,推动组件延肠模型2的长度方向均匀分布;每个推动组件均包括四个绕肠模型2的圆周方向均布的推动轮501;推动轮501两端的两个平面命名为推动轮端面511,推动轮端面511为圆形,每个推动轮501在推动轮端面511上的正投影均为凸轮形,每个推动轮501的弧面上均开设有闭合的推动槽502,每个推动槽502的横截面均为弧形;四个推动槽502组成一个圆环形槽,肠模型2位于四个推动槽502之间被同一推动组件中的四个推动槽502夹持。每个推动槽502由靠近肠模型2的一端到远离肠模型2的一端逐渐变窄;每个推动槽502的两侧边缘与推动轮501的两端面边缘之间均为倾斜的过渡面503。
29.每个推动组件均包括在每个推动轮501上连接的第一转轴504,每个第一转轴504均与推动轮端面511垂直且轴线经过推动轮端面511的圆心,每个第一转轴504的两端均固连有与其同轴的锥齿轮505,每两个相邻的第一转轴504上的锥齿轮505均啮合连接;每个锥齿轮505结构均相同,锥齿轮505之间的传动比为1:1,使锥齿轮505能够带动同一推动组件内的所有第一转轴504和推动轮501同步转动。每个推动组件均包括与其中一个锥齿轮505同轴且固连的第二转轴506,每个肠模型2的直段3上的第二转轴506均平行设置且延直段3的长度方向均匀阵列分布,每个直段3上的第二转轴506均连接有同一个驱动机构。
30.如图6-15所示,第一刷洗机构7包括与肠模型2连接的固定轨道701,固定轨道701是与弯段4同轴设置的圆弧状构件;固定轨道701上为圆弧形的圆筒状结构。弯段4上开设有第一刷洗口702,第一刷洗口702处设置有与其相配合的电动门703,将第一刷洗机构7与弯段4隔开,避免相互影响;固定轨道701上连接有摆动轨道704,摆动轨道704上连接有第一伸缩组件,第一伸缩组件上连接有第二伸缩组件;摆动轨道704、第一伸缩组件和第二伸缩组件都是与弯段4同轴的圆弧状结构。并且摆动轨道704、第一伸缩组件和第二伸缩组件的半径均大于弯段4内壁的内径,均小于弯段4内壁的外径。
31.如图7-10所示,摆动轨道704上连接有往复摆动机构;往复摆动机构包括与摆动轨道704远离第一刷洗口702的一端(摆动轨道704的上端)铰接的摆动杆705,摆动轨道704上固连有铰接座725,铰接座725与摆动杆705一端铰接。固定轨道701上开设有与其同轴的限位槽724,铰接座725在限位槽724内滑动设置,方便将摆动轨道704与摆动杆705连接的同时又能限制铰接座725与摆动轨道704的位置。摆动杆705上固连有第三转轴706,第三转轴706与固定轨道701同轴设置;摆动杆705上开设有长度方向与其一致的滑槽707,第三转轴706设置在铰接座725和滑槽707之间,滑槽707连接有偏心盘;偏心盘包括与滑槽707平行的转动圆盘708,还包括在转动圆盘708上固连的第一滑块709,第一滑块709是与转动圆盘708相垂直的圆柱状结构,第一滑块709设置在滑槽707内并与滑槽707滑动连接;转动圆盘708上连接有第二电机710,第二电机710的轴与转动圆盘708同轴设置。第二电机710固连有支撑
座726,第三转轴706在支撑座726上绕其轴线转动设置。
32.如图8-9所示,当摆动杆705连接铰接座725的一端位于上极限位置时,第一滑块709与转动圆盘708在转动圆盘708的端面上的正投影的圆心连线与滑槽707长度方向垂直,此时第一滑块709带动滑槽707转动至下极限位置。
33.如图4所示,每个驱动机构均包括在第二转轴506上设置的第一链轮507和第二链轮508;位于每个直段3两端的两个第二转轴506上均固连有与其同轴的第一链轮507或第二链轮508,位于每个直段3上的其他第二转轴506上均固连有与其同轴的第一链轮507和第二链轮508,且每个第一链轮507均设置在第二链轮508和锥齿轮505之间;同一个直段3上的每两个相邻的推动组件连接的第一链轮507之间均连接有链条509,同一个直段3上的每两个相邻的推动组件连接的第二链轮508之间均连接有链条509;每个直段3上的其中一个第二转轴506上连接有第一电机510。每个弯段4上的第二转轴506均连接有第一电机510,通过控制器控制直段3与弯段4上的第一电机510同步转动。
34.如图11-15所示,第一伸缩组件包括在摆动轨道704上固连的一对第一滑轨711,每个第一滑轨711上均滑动连接有第二滑块728,两个第二滑块728对称设置,两个第二滑块728之间固连有一个第一支撑筒727,第一支撑筒727为弧形的圆筒状结构,第一支撑筒727上固连有第一齿条712。第二滑块728、第一支撑筒727、第一齿条712与第一滑轨711都是与摆动轨道704同轴的圆弧状结构;第一齿条712啮合连接有第一齿轮713,第一齿轮713在第一齿条712的下端设置,第一齿轮713相对第一滑轨711转动设置,第一齿轮713上连接有第三电机714,第三电机714在摆动轨道704内固连,第三电机714的轴与第一齿轮713同轴设置。
35.第二伸缩组件包括与第一齿条712固连的一对第二滑轨,第二滑轨与第一支撑筒727的内壁固连且设置在第一支撑筒727的中部,两个第二滑轨上滑动连接有一对对称的第三滑块730,两个第三滑块730之间固连有一个第二支撑筒729,第二支撑筒729为弧形的圆筒状结构,使伸缩水管721能够放置在第二支撑筒729内。第二支撑筒729、第一支撑筒727和摆动轨道704的弯曲弧度之和大于180
°
,使第二支撑筒729、第一支撑筒727和摆动轨道704完全伸出后能够对整个弯段4进行刷洗(弯段4为180
°
)。第二支撑筒729上固连有第二齿条716,第三滑块730、第二支撑筒729、第二齿条716与第二滑轨都是与摆动轨道704同轴的圆弧状结构。第二齿条716啮合连接有第二齿轮717,第二齿轮717设置在第二齿条716的下端,第二齿轮717连接有第四电机718,第四电机718的轴与第二齿轮717同轴,第四齿轮在第一支撑筒727的下部固连;第二齿条716的下端固连有第一刷杆719,第一刷杆719在第二支撑筒729的底端固连,第一刷杆719的侧壁上均布有刷毛720,刷毛720需要接触弯段4内壁,所以刷毛720较长且在第一支撑筒727内弯曲收缩;第一刷杆719与第二齿条716都是和第一滑轨711同轴设置的圆弧状结构。
36.如图14-15所示,第一刷杆719靠近第二齿条716的一端连接有伸缩水管721,伸缩水管721为螺旋状结构;可方便放置在第一支撑筒727和第二支撑筒729内,并且螺旋状的伸缩水管721伸缩量大,够配合第一刷杆719伸缩,第一刷杆719内开设有与伸缩水管721连通的喷水通道722,第一刷杆719的侧壁上开设有与喷水通道722相连通的喷水孔723,方便刷洗时喷水。
37.实施例2
本实施例为采用实施例1中胃肠道消化试验系统的方法,包括以下步骤,步骤1,添加食物及试剂;在肠胃模型中加入试剂,将食物放入口腔咀嚼装置10,粉碎机构将食物粉碎,粉碎后的食物进入胃模型;胃蠕动装置使胃模型蠕动将食物初步消化,初步消化后,打开电磁阀,食物进入肠模型2。
38.步骤2,肠模型2蠕动消化食物;肠蠕动装置5使肠模型2蠕动,促进肠模型2消化食物,肠蠕动装置5工作过程为:控制器控制第一电机510同步转动,第一电机510转动带动与其连接的第二转轴506转动,第二转轴506转动带动其上的第一链轮507和第二链轮508转动,第一链轮507和第二链轮508通过链条509带动其余的第一链轮507和第二链轮508转动,进而带动其余第二转轴506转动;第二转轴506带动与其连接的锥齿轮505转动,锥齿轮505带动与其位于同一推动组件的其他锥齿轮505和第一转轴504转动,第一转轴504带动推动轮501转动,推动轮501上的推动槽502向后挤压肠模型2并将肠模型2中的食物向后挤压。
39.步骤3,清理消化系统;食物从肠模型2挤压出去后,实验完成;使用冲洗装置对口腔模型、胃模型和肠模型2进行初步冲洗,将食物残渣冲至消化系统外。
40.随后启动第一刷洗机构7对肠模型2的弯段4进行刷洗,其过程为:第一刷洗口702处的电动门703打开,第四电机718带动第二齿轮717转动,第二齿轮717带动第二齿条716在第二滑轨上滑动,第二齿条716带动第一支撑筒727与第一刷杆719与其同步移动,伸缩水管721随第一刷杆719移动伸长,第一刷杆719与第二齿条716进入弯段4中。随后第二电机710转动并带动转动圆盘708转动,转动圆盘708带动第一滑块709转动,第一滑块709在滑槽707内滑动并带动滑槽707往复摆动,滑槽707带动摆动杆705往复摆动,摆动杆705带动摆动轨道704在固定轨道701上往复摆动,摆动轨道704通过第三电机714、第一齿轮713与第一齿条712带动第一支撑筒727往复摆动,第一支撑筒727通过第四电机718、第二齿轮717带动第二齿条716往复摆动,第二齿条716带动第二支撑筒729和第一刷杆719在肠模型2中往复移动刷洗弯段4的前部。
41.弯段4前部刷洗完毕后,第三电机714带动第一齿轮713转动,第一齿轮713带动第一齿条712与第一支撑筒727延第一滑轨711滑动,第一齿条712与第一支撑筒727移入弯段4中并带动第二齿条716、第二支撑筒729与其同步移动,第二支撑筒729带动第一刷杆719移动至弯段4的后部;第二电机710再次转动并带动摆动轨道704在固定轨道701上往复摆动,摆动轨道704通过第一支撑筒727和第二支撑筒729带动第一刷杆719在弯段4后部往复移动,对弯段4后部进行刷洗。刷洗时伸缩水管721通过喷水通道722与喷水孔723相弯段4内壁喷水。弯段4刷洗完毕后,关闭电动门703,第三电机714与第四电机718反转复位并带动第一伸缩组件与第二伸缩组件复位,第二电机710转动复位并带动摆动轨道704复位,随后第二刷洗机构对肠模型2的直段3进行刷洗;刷洗完毕后,冲洗装置再次对口腔模型、胃模型和肠模型2进行冲洗。
42.实施例3本实施例与实施例1其他部分相同,与实施例1的不同之处在于:胃模型包括胃体,胃蠕动装置包括在胃体的胃大弯1301一侧设置的凸轮1401,凸轮1401的弧面与胃大弯1301贴合,凸轮1401连接有第六电机1402。工作时,与实施例2相比,不同之处在于,胃蠕动装置工作时,第六电机1402顺时针转动并带动凸轮1401挤压胃大弯1301,进而挤压食物,促进消化。食物进入肠模型2时,第六电机1402反转,带动凸轮1401向下挤压食物,使食物稳定进入
肠模型2。
43.实施例4本实施例与实施例1其他部分相同,与实施例1的不同之处在于:弯段4上开设有第二刷洗口,第二刷洗口处设置有电动门703,第二刷洗口在直段3的横截面上的正投影与直段3重合;第二刷洗机构包括与直段3相配合的第二刷杆81,第二刷杆81的一端正对第二刷洗口设置,第二刷杆81远离第二刷洗口的一端连接有第五电机802;第五电机802上连接有电动伸缩杆803。工作时,与实施例2相比,不同之处在于,第二刷洗机构对肠模型2的直段3进行刷洗的过程为:第二刷洗口处的电动门703打开,电动伸缩杆803带动第五电机802与第二刷杆81伸长,第二刷杆81伸入直段3内,第五电机802带动第二刷杆81转动对直段3进行刷洗,刷洗完毕后电动伸缩杆803缩回复位,第二刷洗口处的电动门703关闭。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。