1.本实用新型属于机器加工领域,尤其是涉及一种用于打磨设备的激光视觉标定机构。
背景技术:
2.在自动化设备打磨中大型铸件过程中,由于各个铸件之前的差异比较大,导致打磨质量较差。为解决该问题,引入了激光视觉扫描修正技术。在使用激光视觉装置时首先需要进行手眼标定工作,目的是让激光点云坐标系和设备机器人坐标系建立坐标转化关系。由于金刚石砂轮是圆形的,且有一定的厚度,因此在砂轮表面很难找到合理的标定点和激光视觉系统进行手眼标定。另外,传统方法,如使用棋盘法、九点法等标定方法,对从业人员素质要求过高,而且提升了标定难度,降低了设备实际工作效率。
技术实现要素:
3.有鉴于此,本实用新型旨在提出一种用于打磨设备的激光视觉标定机构,以解决上述问题中的不足之处。
4.为达到上述目的,本实用新型的技术方案是这样实现的:
5.第一方面本方案公开了一种用于打磨设备的激光视觉标定机构,包括打磨装置、激光视觉装置、标定机构;
6.打磨装置包括打磨支架,激光视觉装置固定设置在打磨支架上,激光视觉装置包括防护盒和线激光轮廓传感器,线激光轮廓传感器设置在防护盒内,防护盒底部与打磨支架固定连接;
7.打磨装置包括打磨电机、传动结构、砂轮,打磨电机通过传动结构带动砂轮转动;
8.标定机构一端为卡紧部,另一端为辅助标定部。
9.进一步的,标定机构包括连接杆,连接杆第一端连接有弧形卡件,弧形卡件的开口方向朝向传动结构方向设置;
10.连接杆第二端设置有锥头座和辅助标定头,锥头座与连接杆固定连接,锥头座上设置有容纳孔,容纳孔贯通锥头座设置;
11.辅助标定头设置在锥头座内,辅助标定头靠近砂轮一端为平头,远离砂轮一端为锥头。
12.进一步的,容纳孔的轴线的延长线经过砂轮的圆心。
13.进一步的,打磨电机设置在打磨支架下方,打磨电机的输出端连接有第一带轮,传动结构的输入端连接有第二带轮,第一带轮、第二带轮之间设置有传动皮带;
14.传动结构的输出端与砂轮连接。
15.进一步的,传动结构的输出端与砂轮之间具有空隙,弧形卡件插入空隙中,弧形卡件的弧形开口与传动结构输出端的输出轴的外壁贴合。
16.进一步的,第一带轮、第二带轮与传动皮带部位设置有防护外罩。
17.进一步的,打磨支架远离砂轮一端还连接有连接耳板,连接耳板与打磨支架固定连接,连接耳板上设置有机械臂安装位,所述机械臂安装位用于与机械臂连接。
18.进一步的,防护盒包括盒体和盖体,盒体和盖体内分别设置有第一铰接轴和第二铰接轴,第一铰接轴和第二铰接轴之间连接有支撑杆,通过支撑杆支撑盖体开启。
19.第二方面本方案公开了一种用于打磨设备的激光视觉标定方法,基于第一方面所述的一种用于打磨设备的激光视觉标定机构,包括以下步骤:
20.s1、选取标定参考点和验证点;
21.s2、获取标定机构前端插入到标定参考点内时的机器人末端坐标值m
标
;
22.s3、生成激光点云并记录机器人扫描起始点的末端坐标值m
起
;
23.s4、激光点云中标定参考点处的坐标值j
参
(x2,y2,z2)坐标系转换;
24.s5、求激光点云中标定参考点在机器人坐标系下的坐标值m
参
(x5,y5,z5);
25.s6、建立激光点云坐标系和设备机器人坐标系转化关系r
转
;
26.s7、验证转化关系的精度。
27.相对于现有技术,本实用新型所述的一种用于打磨设备的激光视觉标定机构具有以下有益效果:
28.本实用新型所述的一种用于打磨设备的激光视觉标定机构,通过设置激光视觉标定机构来建立激光点云坐标系和设备机器人坐标系转化关系,通过提出了一种辅助线激光轮廓传感器使用的标定机构,降低了对从业人员素质的要求,降低了标定难度,提高了设备实际工作效率。
附图说明
29.构成本实用新型的一部分的附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
30.图1为本实用新型实施例所述的一种用于打磨设备的激光视觉标定机构结构主视图示意图;
31.图2为本实用新型实施例所述的一种用于打磨设备的激光视觉标定机构结构后视图示意图;
32.图3为本实用新型实施例所述的辅助标定头安装位置示意图;
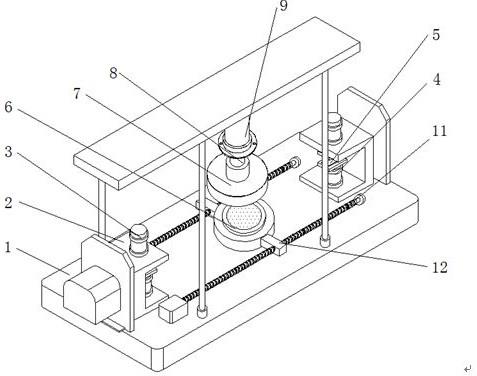
33.图4为本实用新型实施例所述的一种用于打磨设备的激光视觉标定机构整体结构示意图;
34.图5为本实用新型实施例所述的激光视觉装置内部结构局部示意图;
35.图6为本实用新型实施例所述的激光视觉装置内部结构整体示意图。
36.附图标记说明:
37.1-打磨装置;11-打磨支架;12-打磨电机;121-第一带轮;13-传动结构;131-第二带轮;132-输出轴;14-砂轮;15-传动皮带;2-激光视觉装置;21-防护盒;211-盒体;212-盖体;213-第一铰接轴;214-第二铰接轴;215-支撑杆;22-线激光轮廓传感器;3-标定机构;32-连接杆;33-弧形卡件;34-锥头座;341-容纳孔;35-辅助标定头;36-锥头;4-连接耳板;41-机械臂安装位;5-防护外罩。
具体实施方式
38.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
39.下面将参考附图并结合实施例来详细说明本实用新型。
40.本方案主要包括打磨装置、激光视觉装置、标定机构;
41.打磨装置1包括打磨支架11,激光视觉装置2固定设置在打磨支架11上,激光视觉装置2包括防护盒21和线激光轮廓传感器22,线激光轮廓传感器22设置在防护盒21内,防护盒21底部与打磨支架11固定连接,线激光轮廓传感器22型号为312340d-3r-r-22-t;打磨装置1包括打磨电机12、传动结构13、砂轮14,打磨电机12通过传动结构13带动砂轮14转动;标定机构3一端为卡紧部,另一端为辅助标定部。
42.线激光轮廓传感器安装机构的作用是将线激光轮廓传感器安装盒内,通过气缸控制盒盖开启和关闭,确保在检测和加工两种状态下对线激光轮廓传感器进行相应粉尘防护(设备在切割打磨铸件过程中产生大量粉尘)。
43.标定的原理以及步骤:主要思路是利用线激光轮廓传感器标定机构3在被测物体上选取标定点(标定机构3的辅助标定头35的锥头36,通过将锥头36向里推,让平头端顶紧砂轮14,使用线激光轮廓传感器记录锥头36的位置),通过已知机器人坐标系的末端位置数据和激光点云坐标系的位置数据进行算法匹配,从而建立两者之间坐标转化关系,从而实现利用激光视觉装置对机器人的位置纠偏工作。
44.具体工作步骤如下:
45.a、选取标定参考点和验证点
46.考虑到标定精度和激光视觉的识别能力,本专利所涉及的标定机构3前端为锥形结构,这就要求标定参考点和验证点是具有锥形结构的凹点或凸点。由于被打磨的铸件都是金属做成的,具有锥形结构的凸点不易得到,我们通过和标定机构3前端锥形结构一致的簪子在铸件表面处理后得到凹点,即我们想要的标定参考点和验证点。
47.b、获取标定机构前端插入到标定参考点内时的机器人末端坐标值m
标
48.用机器人的示教模式移动机器人使标定机构前端插入到标定参考点内,记录下机器人末端的坐标值m
标
(x0,y0,z0)。
49.c、生成激光点云并记录机器人扫描起始点的末端坐标值m
起
50.通过机器人的示教模式编写线激光轮廓传感器扫描标定参考点和验证点的运动程序并运行,得到包含标定参考点和验证点在内的3d激光点云,并通过相关程序记录机器人扫描起始点的末端坐标值m
起
(x1,y1,z1)。
51.d、激光点云中标定参考点处的坐标值j
参
(x2,y2,z2)坐标系转换
52.通过相关软件提取到激光点云中标定参考点处的坐标值j
参
(x2,y2,z2),由于激光点云坐标系和机器人坐标系不一样,需要利用以下公式转换得到坐标值j
参
(x2,y2,z2)在机器人坐标系下的坐标值j
参转
(x3,y4,z4)。
[0053][0054]
其中:r
旋
为坐标系转换旋转矩阵。
[0055]
e、求激光点云中标定参考点在机器人坐标系下的坐标值m
参
(x5,y5,z5)
[0056]
利用以下公式求激光点云中标定参考点在机器人坐标系下的坐标值m
参
(x5,y5,z5)。
[0057][0058]
f、建立激光点云坐标系和设备机器人坐标系转化关系r
转
[0059]
利用以下公式可以得到激光点云坐标系和设备机器人坐标系转化关系r
转
。
[0060][0061]
g、验证转化关系的精度
[0062]
通过相关软件提取到激光点云中标定验证点处的坐标值j
验
,通过激光点云坐标系和设备机器人坐标系转化关系r
转
可以得到标定机构前端插入到标定验证点内时的机器人末端坐标值m
验
,通过示教模式将机器人移动到该坐标点m
验
处,观察标定机构前端是否能够准确插入标定验证点位置。如果效果不理想,可以重新进行b到f步的标定过程,直到标定机构前端能够准确插入标定验证点位置。
[0063]
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及方法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本实用新型的范围。
[0064]
在本技术所提供的几个实施例中,应该理解到,所揭露的方法和系统,可以通过其它的方式实现。例如,以上所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。上述单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实用新型实施例方案的目的。
[0065]
最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
[0066]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。