1.本实用新型涉及仿生机器人技术领域,具体涉及一种仿生机器人头部快速定位夹取装置。
背景技术:
2.在仿生机器人领域,若想快速对头部进行精准定位而且还要达到夹取的目的,则夹取装置必须约束空间x、y和z三坐标产生的6个自由度,现有的夹取方式往往是通过多次重复拆卸螺钉的方式进行约束,这样不仅效率低,而且还会因多次拆装造成的螺钉损坏。
3.在仿生机器人领域,现有的夹取方式往往是通过多次重复拆卸螺钉的方式进行约束,这样不仅效率低,而且还会因多次拆装造成的螺钉损坏,也有一些是通过单一卡扣的方式进行夹取,这样的方式只能约束1个或2个自由度,其它是靠接触摩擦约束,这样不仅产生摩擦磨损寿命降低,而且会因磨损后产生的间隙间接造成夹取不稳。
技术实现要素:
4.发明目的:本实用新型目的在于针对现有技术的不足,提供一种仿生机器人头部快速定位夹取装置,采用多方向滑块自锁方式,实现一键操作即可锁紧,不仅提高了夹取效率,降低了人工,而且还提高了安全可靠性。
5.技术方案:本实用新型所述仿生机器人头部快速定位夹取装置,仿生机器人头部快速定位夹取装置,其特征在于:包括主连接套、被连接套以及两个半圆压片;所述主连接套包括连接柱、设于连接柱底部的定位滑套,连接柱上设有导向组件和压缩弹簧,两个半圆压片设置在连接柱两侧,所述被连接套设置在主连接套下方;两个半圆压片底端对称设有锁紧抓钩,所述定位滑套、被连接套对应锁紧抓钩均设有方槽;所述导向组件和压缩弹簧贯穿连接柱与两侧的半圆压片相连,两侧的半圆压片在外力作用下克服所述压缩弹簧的弹力并沿着导向组件朝向连接柱中心运动,两个锁紧抓钩随着半圆压片相向运动至待夹取状态,所述定位滑套向下运动套设在所述被连接套上至两者方槽呈对应状态,外力消失后压缩弹簧恢复弹力带动两侧的半圆压片反向运动,两个锁紧抓钩随着半圆压片反向运动并限位至方槽处将所述定位滑套与被连接套进行锁紧。
6.进一步完善上述技术方案,所述压缩弹簧水平设置在连接柱中部,所述连接柱在压缩弹簧的上方、下方设有上直线轴承、下直线轴承,所述导向组件包括两个上滑动销轴和两个下滑动销轴,两个上滑动销轴嵌入上直线轴承内且外端与两个半圆压片的顶部相连,两个下滑动销轴嵌入下直线轴承内且外端与两个半圆压片的底部相连。
7.进一步地,所述导向组件还包括上限位组件、下限位组件,所述上限位组件设置在所述上直线轴承与压缩弹簧之间,所述下限位组件设置在所述压缩弹簧与下直线轴承之间;所述上限位组件包括上限位杆和上限位螺母,所述下限位组件包括下限位杆和下限位螺母,所述上限位杆外侧与一半圆压片固定相连、内侧通过上限位螺母与连接柱固定相连,所述下限位组件外侧与另一半圆压片固定相连、内侧通过下限位螺母与连接柱固定相连。
8.进一步地,所述定位滑套、被连接套均呈锥形结构。
9.进一步地,所述定位滑套底部设有定向光轴,所述被连接套对应定向光轴设有v型槽,所述定位滑套套设在被连接套上时,定向光轴嵌入v型槽处被限位。
10.进一步地,所述定向光轴的安装方向与所述导向组件、压缩弹簧的安装方向相垂直。
11.进一步地,所述锁紧抓钩包括连接臂和锁紧臂,连接臂与所述半圆压片水平连接,锁紧臂与连接臂呈小于45
°
角固定连接。
12.进一步地,所述主连接套顶端设有法兰,所述被连接套底端设有法兰。
13.进一步地,所述主连接套的法兰、连接柱、定位滑套为一体成型结构。
14.进一步地,所述外力采用人力或机械手。
15.有益效果:与现有技术相比,本实用新型的优点在于:本实用新型采用弹簧连接实现夹取的控制,控制过程通过滑动销轴、限位螺母导向,结构简单,导向稳固,控制方便,底部通过定向光轴、锁紧抓钩实现被连接套的夹取,将传统仿生机器人头部夹取方式升级为一种快速高效稳定的夹取方式,其中将螺钉锁紧方式更改为多方向滑块自锁方式,实现一键操作即可锁紧,同时也将人工定向的方式更改为了物理自动定向方式,不仅提高了夹取效率、降低了人工,而且还提高了安全可靠性。
16.采用本实用新型进行装夹时间大约为4秒左右,约是普通装夹效率的30倍,而且能够实现采用机械臂进行配合夹取,不仅装夹精度高,省人力,而且易于程序化控制,可实现批量自动化应用。
附图说明
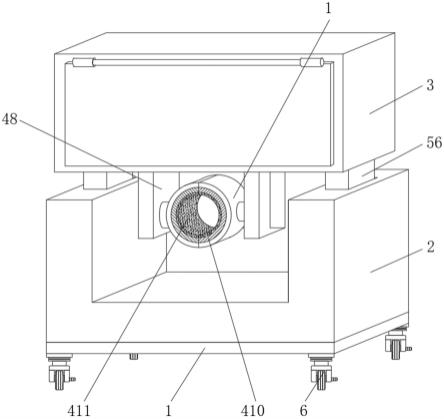
17.图1是本实用新型的结构示意图;
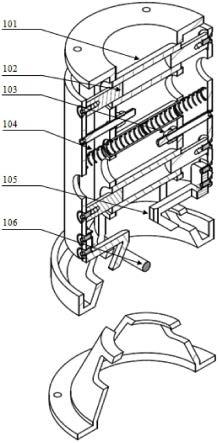
18.图2是本实用新型的纵向剖视图;
19.图3是本实用新型中半圆压片与主连接套处于初始状态的示意图;
20.图4是本实用新型中半圆压片向主连接套靠拢状态的示意图;
21.图5是图4的纵向剖视图;
22.图6是半圆压片与主连接套靠拢后准备夹取被连接套的剖视图;
23.图7是半圆压片与主连接套解除靠拢后夹取被连接套的剖视图;
24.图8是半圆压片与主连接套解除靠拢后夹取被连接套的状态示意图。
25.图中:1、主连接套,2、半圆压片,3、被连接套,101、直线轴承,102、滑动销轴,103、限位螺母,104、压缩弹簧,105、锁紧抓钩,106、定向光轴。
具体实施方式
26.下面通过附图对本实用新型技术方案进行详细说明,但是本实用新型的保护范围不局限于所述实施例。
27.如图1、图2所示的仿生机器人头部快速定位夹取装置,包括主连接套1、两个半圆压片2、被连接套3;主连接套1包括连接柱,连接柱顶端设有法兰、底端设有定位滑套。连接柱中部设有压缩弹簧104、顶部和底部均设有直线轴承101,在压缩弹簧104和两个直线轴承101之间设有限位螺母103;两个半圆压片2设置在连接柱两侧通过贯穿连接柱中部的压缩
弹簧104连接,半圆压片2的顶部、底部分别通过滑动销轴102与连接柱内的直线轴承101滑动相连,其中一侧的半圆压片2通过限位杆与连接柱顶部的限位螺母103连接、另一侧的半圆压片2通过限位杆与连接柱底部的限位螺母103连接。半圆压片2底部对称设有锁紧抓钩105,锁紧抓钩105包括水平的连接臂以及与连接臂呈小于45
°
连接的锁紧臂。定位滑套底部设有定向光轴106,定向光轴106的方向与压缩弹簧104相垂直,被连接套3对应定向光轴106设有v型槽。
28.本实用新型各个零部件相互联动方可达到快速定位夹取的目的,通过被连接套3上的法兰可以连接被需要连接的物体,由主连接套1形成的组件可利用其自带法兰来连接到机器人颈部中。
29.夹取的首要步骤是手动或机器手进行压缩两侧的半圆压片2,半圆压片2带动上下滑动销轴102在上下直线轴承101中滑动,主连接套1的中心外壁和限位螺母103约束了半圆压片2的横向运动行程,压缩半圆压片2的同时不仅压缩了压缩弹簧104,而且还使半圆压片2上的锁紧抓钩105向中心靠拢,上下布置的双轴滑动机构使半圆压片2运动使其压到限定位置,参见图3、图4和图5。
30.此时夹取准备工作已完成,现准备夹取,首先将已经夹取好的半圆压片2组件置于被连接套3上方,使定向光轴106位于被连接套3的v形槽上方,参见图5,然后将半圆压片2组件垂直向下移动,随着逐渐下移,定向光轴106将被连接套3的v形槽导向定位,形成了空间周向定位约束,同时主连接套1上的凹形锥和被连接套3的凸形锥形成了凹凸导向配合,从而达到了垂直方向的定位约束,参见图6。当凹凸锥面完全配合后,手动或机器手松开半圆压片2,此时被压缩的压缩弹簧104自动释放,同时也推动半圆压片2向两侧移动,半圆压片2向两侧移动的同时带动着锁紧抓钩105向两侧移动,锁紧抓钩105移动时靠着钩子上的斜钩面逐渐导向切入到被连接套3的方槽中,随着斜钩面的不断切入,则产生逐步锁紧的目的,钩子斜面斜度小于45
°
,在弹簧压缩的状态下,斜面则产生自锁现象,垂直方向无论使用多大力都无法使之松脱,再加上弹簧的推力使凹凸锥面零间隙配合和定向光轴106的周向锁定,使整体达到无间隙不松脱的夹紧状态,最终完成了快速定位夹取,参见图7、图8,若想释放,则反之。
31.在仿生机器人领域中,本实用新型能够实现机器人头部快速切换或其它部位的切换以达到想要目的,普通螺钉装夹大约需要时间2分钟而且很难达到自动化,若使用此发明装置,装夹时间大约为4秒左右,约是普通装夹效率的30倍,而且此装置可以实现用机械臂手抓进行夹取,不仅装夹精度高,省人力,而且易于程序化控制,可实现批量自动化应用。
32.如上所述,尽管参照特定的优选实施例已经表示和表述了本实用新型,但其不得解释为对本实用新型自身的限制。在不脱离所附权利要求定义的本实用新型的精神和范围前提下,可对其在形式上和细节上作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。