1.本实用新型涉及机械臂技术领域,具体为一种声悬浮机械臂。
背景技术:
2.声悬浮虽然早已问世,却还未像磁悬浮那样普及至市场上,但声悬浮技术已经较为成熟,声悬浮机械臂未尝不是一个富有希望的尝试,在国外,虽然出现了类似的实验用声悬浮设备,但价格却不怎么贴近市场,一种相对较为廉价的声悬浮机械臂无疑是比较好的选择。它的悬浮功能并不是看起来那么玄幻,而是十分实用经济而且较为容易实现,声悬浮是一种不同于磁悬浮的新式悬浮技术,机械爪则是一种已经成熟了的机械技术。二者的结合产生的可以不用接触物体而进行抓握的特殊能力,并且对与被悬浮物几乎没有特殊要求,这使得声悬浮机械爪的前景十分光明,它独特的性质使得其用途更加宽广,利用声悬浮技术来抓握的机械爪也会是新的值得开发的方式。
3.为此,我们设计了一种声悬浮机械臂。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种声悬浮机械臂,解决了制作成本高,普通机械臂无法不触碰到物品进行抓取的问题。
5.为了达到上述目的,本实用新型所采用的技术方案是:
6.一种声悬浮机械臂,包括底座,所述底座为方形结构,且底座上表面中间位置安装有基座,所述基座垂直安装在底座上表面,所述基座远离底座的一侧通过转轴转动连接有主臂的一端,所述主臂另一端通过转轴转动连接有转动块的一角,所述转动块为三角形结构,且转动块下端的一角通过转轴转动连接侧干的一端,所述侧干另一端通过转轴转动连接基座上端,所述转动块与侧杆连接处转动连接有副臂,所述副臂为弧形结构,且副臂另一端转动连接有连接块,所述连接固定连接有舵机,且舵机为u型结构,所述舵机凹面位置安装有声悬浮装置,两组所述声悬浮装置相互对称。
7.进一步的,所述底座内部安装有电源,所述电源外壳固定连接底座内壁,且底座上内部安装有主控板,所述主控板外壳与底座内壁固定连接,所述电源与主控板电性连接。
8.进一步的,所述舵机内部安装有支架,所述支架为平面结构,所述支架表面通过转轴转动连接有滚轮,两组所述滚轮相互对称,两组所述滚轮之间存在间隙。
9.进一步的,所述滚轮上表面靠近中心位置固定连接有连接杆的中间位置,且连接杆一端转动连接滚轮上表面中心位置,且滚轮另一端转动连接有推杆的一端,所述推杆另一端转动连接声悬浮装置。
10.进一步的,所述推杆中间位置通过转轴转动连接有横杆的一端,且横杆另一端转动连接支架表面。
11.进一步的,所述滚轮侧边开设有螺纹,两组所述滚轮之间安装有螺纹杆,所述螺纹杆与两组所述滚轮紧密贴合,所述滚轮侧边螺纹与螺纹杆螺纹连接。
12.本实用新型的有益效果为:
13.1、该实用新型,机械爪底座采用方台型状,并且采用亚克力制成,主控板与电池等零部件装载在其内,使得机械爪重心变低,增加机械爪的稳定性;机械爪基座采用粗短的形状,使得机械爪更为稳固。主臂较长,目的是使得机械爪有更大的运动空间,并且更加地与人类手臂相似;机利用一个舵机相连,使得机械爪能够绕中心轴进行旋转,大大提高其机动性。
14.2、该实用新型,利用声悬浮装置实现对液态物质的无容器抓获,并且.实现对类似于蚂蚁等小型动物的活体悬浮抓握,并且在抓握过程中仍保证其生命的活性,透过(不接触)容器捕获容器内的物体。
附图说明
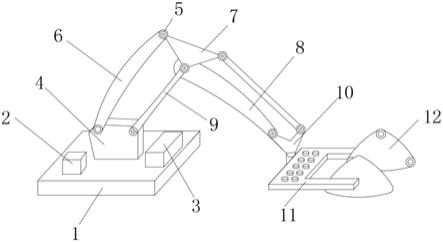
15.图1为本实用新型的结构示意图;
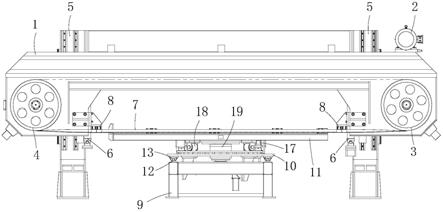
16.图2为本实用新型中滚轮的俯视结构示意图;
17.图3为本实用新型中电路流程图。
18.图中:1、底座;2、电源;3、主控板;4、基座;5、转轴;6、主臂;7、转动块;8、副臂;9、侧杆;10、连接块;11、舵机;12、声悬浮装置;13、推杆;14、连接杆;15、滚轮;16、螺纹杆;17、支架。
具体实施方式
19.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.参看图1
‑
3:一种声悬浮机械臂,包括底座1,所述底座1为方形结构,且底座1上表面中间位置安装有基座4,所述基座4垂直安装在底座1上表面,所述基座4远离底座1的一侧通过转轴5转动连接有主臂6的一端,所述主臂6另一端通过转轴5转动连接有转动块7的一角,所述转动块7为三角形结构,且转动块7下端的一角通过转轴5转动连接侧干的一端,所述侧干另一端通过转轴5转动连接基座4上端,所述转动块7与侧杆9连接处转动连接有副臂8,所述副臂8为弧形结构,且副臂8另一端转动连接有连接块10,所述连接固定连接有舵机11,且舵机11为u型结构,所述舵机11凹面位置安装有声悬浮装置12,两组所述声悬浮装置12相互对称。
21.进一步的,所述底座1内部安装有电源2,所述电源2外壳固定连接底座1内壁,且底座1上内部安装有主控板3,所述主控板3外壳与底座1内壁固定连接,所述电源2与主控板3电性连接。
22.进一步的,所述舵机11内部安装有支架17,所述支架17为平面结构,所述支架17表面通过转轴5转动连接有滚轮15,两组所述滚轮15相互对称,两组所述滚轮15之间存在间隙。
23.进一步的,所述滚轮15上表面靠近中心位置固定连接有连接杆14的中间位置,且
连接杆14一端转动连接滚轮15上表面中心位置,且滚轮15另一端转动连接有推杆13的一端,所述推杆13另一端转动连接声悬浮装置12。
24.进一步的,所述推杆13中间位置通过转轴5转动连接有横杆的一端,且横杆另一端转动连接支架17表面。
25.进一步的,所述滚轮15侧边开设有螺纹,两组所述滚轮15之间安装有螺纹杆16,所述螺纹杆16与两组所述滚轮15紧密贴合,所述滚轮15侧边螺纹与螺纹杆16螺纹连接。
26.综上所述,本实用新型在使用时,机械爪底座1采用方台型状,并且采用亚克力制成,主控板3与电池等零部件装载在其内,使得机械爪重心变低,增加机械爪的稳定性;机械爪基座4采用粗短的形状,使得机械爪更为稳固。主臂6较长,目的是使得机械爪有更大的运动空间,并且更加地与人类手臂相似;机利用一个舵机11相连,使得机械爪能够绕中心轴进行旋转,大大提高其机动性,利用声悬浮装置12实现对液态物质的无容器抓获,并且.实现对类似于蚂蚁等小型动物的活体悬浮抓握,并且在抓握过程中仍保证其生命的活性,透过(不接触)容器捕获容器内的物体。
27.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
技术特征:
1.一种声悬浮机械臂,包括底座(1),其特征在于:所述底座(1)为方形结构,且底座(1)上表面中间位置安装有基座(4),所述基座(4)垂直安装在底座(1)上表面,所述基座(4)远离底座(1)的一侧通过转轴(5)转动连接有主臂(6)的一端,所述主臂(6)另一端通过转轴(5)转动连接有转动块(7)的一角,所述转动块(7)为三角形结构,且转动块(7)下端的一角通过转轴(5)转动连接侧干的一端,所述侧干另一端通过转轴(5)转动连接基座(4)上端,所述转动块(7)与侧杆(9)连接处转动连接有副臂(8),所述副臂(8)为弧形结构,且副臂(8)另一端转动连接有连接块(10),所述连接固定连接有舵机(11),且舵机(11)为u型结构,所述舵机(11)凹面位置安装有声悬浮装置(12),两组所述声悬浮装置(12)相互对称。2.根据权利要求1所述的一种声悬浮机械臂,其特征在于:所述底座(1)内部安装有电源(2),所述电源(2)外壳固定连接底座(1)内壁,且底座(1)上内部安装有主控板(3),所述主控板(3)外壳与底座(1)内壁固定连接,所述电源(2)与主控板(3)电性连接。3.根据权利要求1所述的一种声悬浮机械臂,其特征在于:所述舵机(11)内部安装有支架(17),所述支架(17)为平面结构,所述支架(17)表面通过转轴(5)转动连接有滚轮(15),两组所述滚轮(15)相互对称,两组所述滚轮(15)之间存在间隙。4.根据权利要求3所述的一种声悬浮机械臂,其特征在于:所述滚轮(15)上表面靠近中心位置固定连接有连接杆(14)的中间位置,且连接杆(14)一端转动连接滚轮(15)上表面中心位置,且滚轮(15)另一端转动连接有推杆(13)的一端,所述推杆(13)另一端转动连接声悬浮装置(12)。5.根据权利要求4所述的一种声悬浮机械臂,其特征在于:所述推杆(13)中间位置通过转轴(5)转动连接有横杆的一端,且横杆另一端转动连接支架(17)表面。6.根据权利要求4所述的一种声悬浮机械臂,其特征在于:所述滚轮(15)侧边开设有螺纹,两组所述滚轮(15)之间安装有螺纹杆(16),所述螺纹杆(16)与两组所述滚轮(15)紧密贴合,所述滚轮(15)侧边螺纹与螺纹杆(16)螺纹连接。
技术总结
本实用新型涉及机械臂技术领域,且公开了一种声悬浮机械臂,包括底座,所述底座为方形结构,且底座上表面中间位置安装有基座,所述基座垂直安装在底座上表面,所述基座远离底座的一侧通过转轴转动连接有主臂的一端,所述主臂另一端通过转轴转动连接有转动块的一角,所述转动块为三角形结构,且转动块下端的一角通过转轴转动连接侧干的一端,所述侧干另一端通过转轴转动连接基座上端,所述转动块与侧杆连接处转动连接有副臂。该声悬浮机械臂,机械爪底座采用方台型状,并且采用亚克力制成,主控板与电池等零部件装载在其内,使得机械爪重心变低,增加机械爪的稳定性;机械爪基座采用粗短的形状,使得机械爪更为稳固。使得机械爪更为稳固。使得机械爪更为稳固。
技术研发人员:陈瑶 卢宁 李峰 高扬 贾汶韬
受保护的技术使用者:太原理工大学
技术研发日:2021.01.10
技术公布日:2021/11/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。