1.本申请涉及环境控制技术领域,具体公开了一种精确定位的智能喷雾控制系统。
背景技术:
2.随着工业的发展,钢铁、煤炭等行业的开采、运输、冶炼过程中产生重大污染,在生产过程中产生大量粉尘排放到空气中,对人体的身体健康产生巨大影响;
3.以往喷雾设备不具备俯仰旋转角度的精确定位,反馈,不能够及时降尘,环境恶劣的情况下,如果在现场进行操作会对人体产生伤害;
4.以往喷雾设备不具备对产生粉尘的区域进行精准定位,以实现精准除尘的功能;
5.因此,发明人有鉴于此,提供了一种精确定位的智能喷雾控制系统,以便解决上述问题。
技术实现要素:
6.本发明的目的在于解决传统的喷雾设备不具备对产生粉尘的区域精确定位功能,不能精确除尘的问题。
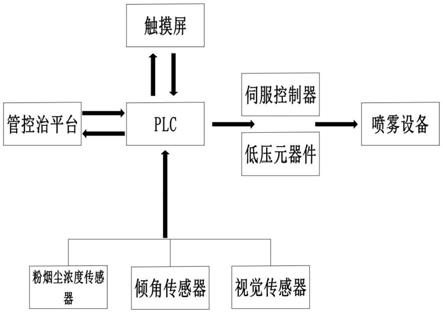
7.为了达到上述目的,本发明的基础方案提供一种精确定位的智能喷雾控制系统,包括智能控制单元、传感单元、管控治云平台和喷雾设备;
8.智能控制单元包括plc控制器、用于控制plc控制器的触摸屏控制器和可由plc控制器控制的伺服控制器;
9.传感单元包括相互独立的倾角传感器、视觉传感器和粉烟尘浓度传感器,传感单元将采集的信息均通过plc控制器反馈至管控治云平台;
10.管控治云平台接收由plc控制器汇总的信息并进行分析处理,再反馈至plc控制器,plc控制器收到反馈并驱动伺服控制器控制喷雾设备。
11.进一步,伺服控制器采用的伺服编码器为17位绝对值编码器。
12.进一步,喷雾设备包括水泵、与水泵进水端连通的进水阀、与水泵出水端连通的出水阀、与出水阀末端连通的调节阀和用于吹出水雾的风机。
13.进一步,管控制云平台与plc控制器通过网络设备桥接。
14.进一步,管控治云平台与plc控制器采用modbus tcp协议通讯。
15.进一步,管控治云平台包括管控治服务器、网络通讯模块和控制云平台。
16.进一步,喷雾设备的俯仰角度与丝杠长度有关,本系统采用的俯仰角度与丝杆长度的算法关系式为:其中α为风机相对水平面角度,φ为俯仰角,俯仰角最低为负角度,s为丝杆推出长度。
17.与现有技术相比,本发明的有益效果为:
18.1.本发明通过算法关系式,管控制云平台可通过plc控制器针对喷雾旋转俯仰精确定位,除尘效果好,安全性能高,解决了传统的喷雾设备不具备对产生粉尘的区域精确定
位功能,不能精确除尘的问题。
19.2.本发明可通过管控制云平台自动调节喷水用水量,减少用电用水量,进一步将强能源管控。
20.3.本发明通过采用plc控制器进行总控,可通过管控制云平台和触摸屏控制器进行喷雾方案的优化,减少人员现场调节频率,对人体减少伤害。
附图说明
21.为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
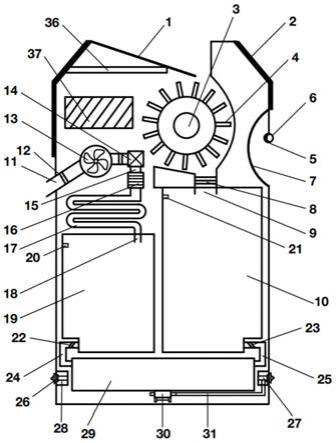
22.图1示出了本申请实施例提出的一种精确定位的智能喷雾控制系统的示意图;
23.图2示出了本申请实施例提出的一种精确定位的智能喷雾控制系统内plc程序梯形图的示意图;
24.图3示出了本申请实施例提出的一种精确定位的智能喷雾控制系统内plc程序梯形图的示意图;
25.图4示出了本申请实施例提出的一种精确定位的智能喷雾控制系统的俯仰角关系示意图。
具体实施方式
26.下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部的实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
27.下面通过具体实施方式进一步详细的说明:
28.一种精确定位的智能喷雾控制系统,实施例如图1所示,包括智能控制单元、传感单元、管控治云平台和喷雾设备;
29.其中智能控制单元又包括了plc控制器、伺服控制器和触摸屏控制器,本系统以plc控制器为中控中心,伺服控制器可获取plc控制器的信息以及通过plc控制器控制其他单元、元器件,plc控制器还关联有低压元器件,伺服控制器由plc控制器控制,并且伺服控制器和低压元器件可控制喷雾设备,且本系统内的伺服控制器采用的伺服编码器为17位绝对值编码器;
30.传感单元包括相互独立的倾角传感器、视觉传感器和粉烟尘浓度传感器,倾角传感器、视觉传感器和粉烟尘浓度传感器均将所采集到的信息均反馈至plc控制器,plc控制器将所采集的信息进行汇总并反馈至触摸屏控制器和管控制平台;
31.本系统内管控制云平台与plc控制器通过网络设备桥接,管控治云平台与plc控制器采用modbus tcp协议通讯,管控治云平台包括管控治服务器、网络通讯模块和控制云平台,管控治云平台接收由plc控制器汇总的信息,包括由倾角传感器、视觉传感器和粉烟尘浓度传感器均将所采集到的信息和触摸屏控制器的操作信息,进行分析处理,再反馈至plc
控制器;
32.喷雾设备包括水泵、与水泵进水端连通的进水阀、与水泵出水端连通的出水阀、与出水阀末端连通的调节阀和用于吹出水雾的风机,风机的俯仰角度与丝杆长度有关,俯仰角度与丝杆长度算法通过实际测试风筒相对水平角度和丝杆推出长度关系如图4所示,且plc程序梯形图如图2和图3所示,测试出角度与丝杆关系公式为其中α为风机相对水平面角度,俯仰到最低为负角度,s为丝杆推出长度,通过plc系统对公式进行算法处理能够准确地对旋转俯仰角度能够精确反馈,通过管控治平台或者触摸屏设置角度,能够对旋转俯仰准确定位,伺服误差精度保证0.01
°
;
33.视觉传感器安装在喷雾设备内的风机旁,对产尘区域进行识别,并将产尘区域角度通过plc控制器反馈至管控治云平台,管控治平台通过后台分析,下发旋转或者俯仰角度位置,风机准确定位从而达到降尘效果,通过粉尘浓度传感器可对产尘浓度进行检测,将产尘浓度通过plc控制器反馈至管控治云平台,管控治云平台通过后台分析,对调节阀进行控制,调节喷雾流量,从而调节用水用电量;
34.本发明通过算法关系式,管控制云平台可通过plc控制器针对喷雾旋转俯仰精确定位,除尘效果好,安全性能高,解决了传统的喷雾设备不具备对产生粉尘的区域精确定位功能,不能精确除尘的问题。
35.最后应说明的是:以上实施例仅用以说明本申请的技术方案,而非对其限制;尽管参照前述实施例对本申请进行了详细的说明,本领域的普通技术人员当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不驱使相应技术方案的本质脱离本申请各实施例技术方案的精神和范围。
技术特征:
1.一种精确定位的智能喷雾控制系统,其特征在于,包括智能控制单元、传感单元、管控治云平台和喷雾设备;智能控制单元包括plc控制器、用于控制plc控制器的触摸屏控制器和可由plc控制器控制的伺服控制器;传感单元包括相互独立的倾角传感器、视觉传感器和粉烟尘浓度传感器,传感单元将采集的信息均通过plc控制器反馈至管控治云平台;管控治云平台接收由plc控制器汇总的信息并进行分析处理,再反馈至plc控制器,plc控制器收到反馈并驱动伺服控制器控制喷雾设备。2.根据权利要求1所述的一种精确定位的智能喷雾控制系统,其特征在于,伺服控制器采用的伺服编码器为17位绝对值编码器。3.根据权利要求2所述的一种精确定位的智能喷雾控制系统,其特征在于,喷雾设备包括水泵、与水泵进水端连通的进水阀、与水泵出水端连通的出水阀、与出水阀末端连通的调节阀和用于吹出水雾的风机。4.根据权利要求2所述的一种精确定位的智能喷雾控制系统,其特征在于,管控制云平台与plc控制器通过网络设备桥接。5.根据权利要求4所述的一种精确定位的智能喷雾控制系统,其特征在于,管控治云平台与plc控制器采用modbus tcp协议通讯。6.根据权利要求5所述的一种精确定位的智能喷雾控制系统,其特征在于,管控治云平台包括管控治服务器、网络通讯模块和控制云平台。7.根据权利要求2至6任一所述的一种精确定位的智能喷雾控制系统,其特征在于,喷雾设备的俯仰角度与丝杠长度有关,本系统采用的俯仰角度与丝杆长度的算法关系式为:其中α为风机相对水平面角度,φ为俯仰角,俯仰角最低为负角度,s为丝杆推出长度。
技术总结
本发明涉及环境控制技术领域,具体公开了一种精确定位的智能喷雾控制系统,包括智能控制单元、传感单元、管控治云平台和喷雾设备;智能控制单元包括PLC控制器、用于控制PLC控制器的触摸屏控制器和可由PLC控制器控制的伺服控制器;传感单元包括相互独立的倾角传感器、视觉传感器和粉烟尘浓度传感器,传感单元将采集的信息均通过PLC控制器反馈至管控治云平台;管控治云平台接收由PLC控制器汇总的信息并进行分析处理,再反馈至PLC控制器,PLC控制器收到反馈并驱动伺服控制器控制喷雾设备,解决了传统的喷雾设备不具备对产生粉尘的区域精确定位功能,不能精确除尘的问题。不能精确除尘的问题。不能精确除尘的问题。
技术研发人员:张健 刘黎明 龚京忠 周进 张浩 唐逸帆
受保护的技术使用者:湖南九九智能环保股份有限公司
技术研发日:2022.02.14
技术公布日:2022/6/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。