1.本发明涉及抓手技术领域,具体为一种码垛机器人抓手。
背景技术:
2.机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。目前在操作机械抓手进行夹紧对货物运输时,容易出现夹板与货物之间存在灰尘,而导致灰尘在货物与夹板之间滚动,使得货物在夹板间打滑掉落的情况发生。
技术实现要素:
3.针对现有技术的不足,本发明提供了一种码垛机器人抓手,实现解决上述问题的目的。
4.为实现以上目的,本发明通过以下技术方案予以实现:一种码垛机器人抓手,包括顶板,所述顶板底部固定连接有液压伸缩杆,所述液压伸缩杆底部固定连接有液压夹紧机,所述液压夹紧机底部设置有夹板,所述夹板内部设置有除尘夹紧机构;
5.所述除尘夹紧机构包括滑块、吸盘、气槽a、连接杆、推块、滑槽、弹性板,所述滑块外壁与夹板内壁滑动连接,所述吸盘外壁与滑块一侧固定连接,所述气槽a开设在滑块内部,所述滑块另一侧与弹性板一端固定连接,所述弹性板另一端与夹板内壁一侧固定连接,所述连接杆一端与滑块一侧固定连接,所述连接杆另一端与推块外壁固定连接,所述推块外壁与滑槽内壁滑动连接,所述滑槽开设在夹板内部,所述夹板内部设置有气压吹散清洁机构;
6.所述气压吹散清洁机构包括气槽b、磁块a,所述气槽b开设在夹板内部,所述磁块a外壁固定连接在夹板内部。
7.优选的,所述气压吹散清洁机构还包括磁块b、小夹块、弹性绳、喷气孔,所述磁块b外壁与小夹块内壁滑动连接,所述夹板内部开设有空腔,所述小夹块外壁与空腔内壁滑动连接,所述磁块b外壁与弹性绳一端固定连接,所述弹性绳另一端与小夹块内壁一侧固定连接,所述喷气孔开设在小夹块内部。
8.优选的,所述磁块a与磁块b相对一侧的磁性为异极,从而使得异极相吸。
9.优选的,所述气槽a内部与夹板内壁连通,从而使得空气进行连通。
10.优选的,所述滑槽内部与气槽b内部连通,所述气槽b内部与空腔内部连通,从而使得空气进行连通。
11.优选的,所述喷气孔内部与空腔内部连通,从而使得空气进行连通。
12.优选的,所述小夹块内部开设有通气槽,通气槽内部与小夹块内壁连通,从而使得空气进行连通。
13.本发明提供了一种码垛机器人抓手。具备以下有益效果:
14.(1)、一种码垛机器人抓手,通过设置除尘夹紧机构,在夹板对货物进行夹取的时候,夹板内部的滑块受到货物挤压而向夹板内壁滑动,并挤压夹板内壁的空气通过气槽a喷出,从而对货物表面通过空气进行喷洒,将货物表面大量的灰尘与残渣吹散,保证货物表面的清洁,继而提升滑块与货物之间接触的摩擦力,提升滑块对货物的夹紧能力。
15.(2)、一种码垛机器人抓手,通过设置除尘夹紧机构,在夹紧后,夹板停止向内滑动夹紧,此时吸盘对货物表面进行紧密接触,并对气槽a与夹板内壁进行空间密闭,继而可以在夹紧货物进行移动的时候,因为气槽a与夹板内壁的空气量为密闭,使得夹板不会因为晃动而导致货物摇晃在滑块表面打滑,而被吸盘紧密吸住,也减少夹板因为震动而松懈的问题出现,进一步提升夹紧后的摩擦力。
16.(3)、一种码垛机器人抓手,通过设置气压吹散清洁机构,滑块被挤压向夹板内壁滑动的时候,通过连接杆推动推块向滑槽内壁推动,并推动滑槽内部的空气进入气槽b内,同时通过气槽b进入夹板内部的空腔中,对小夹块进行推动挤压,小夹块被推动挤压时在空腔内滑动,并通过小夹块与滑块同时与货物进行接触并夹紧,从而提升接触面积,进一步增加摩擦力,提升夹紧效果。
17.(4)、一种码垛机器人抓手,通过设置气压吹散清洁机构,在小夹块被推出后,小夹块内部的磁块b逐渐远离磁块a后,磁块b与磁块a之间的磁性消失了,磁块b则瞬间受到弹性绳的拉力将其拉动并瞬间挤压小夹块内壁的空气通过喷气孔瞬间推出,继而对货物表面进行高强度的气体喷洒,继而在吸盘将货物表面的灰尘喷动滑落时,再次通过喷气孔的高压强的气体将其喷散,保证了灰尘大量脱离货物表面,进一步提升了货物与滑块之间的清洁无尘环境,避免了灰尘残存而打滑无法夹紧货物导致货物跌落的情况出现。
附图说明
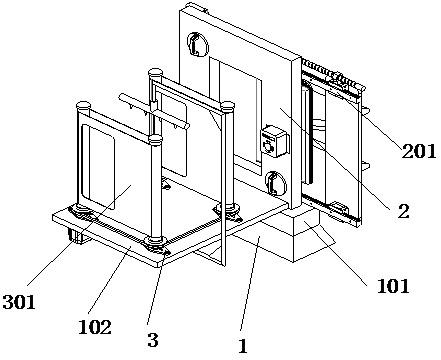
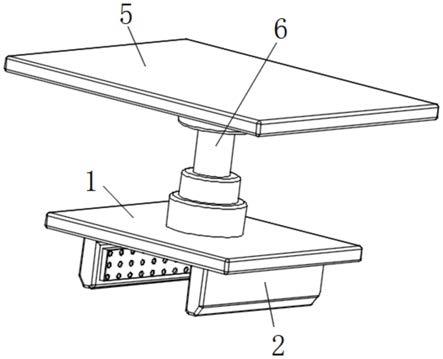
18.图1为本发明结构示意图;
19.图2为本发明正面剖视图;
20.图3为本发明图2的a处放大图;
21.图4为本发明图3的b处放大图。
22.图中:1液压夹紧机、2夹板、3除尘夹紧机构、301滑块、302吸盘、303气槽a、304连接杆、305推块、306滑槽、307弹性板、4气压吹散清洁机构、401气槽b、402磁块a、403磁块b、404小夹块、405弹性绳、406喷气孔、5顶板、6液压伸缩杆。
具体实施方式
23.请参阅图1-4,本发明提供一种技术方案:一种码垛机器人抓手,包括顶板5,顶板5底部固定连接有液压伸缩杆6,液压伸缩杆6底部固定连接有液压夹紧机1,液压夹紧机1底部设置有夹板2,夹板2内部设置有除尘夹紧机构3;
24.除尘夹紧机构3包括滑块301、吸盘302、气槽a303,气槽a303内部与夹板2内壁连通,连接杆304、推块305、滑槽306,滑槽306内部与气槽b401内部连通,气槽b401内部与空腔内部连通,弹性板307,滑块301外壁与夹板2内壁滑动连接,吸盘302外壁与滑块301一侧固定连接,气槽a303开设在滑块301内部,滑块301另一侧与弹性板307一端固定连接,弹性板307另一端与夹板2内壁一侧固定连接,连接杆304一端与滑块301一侧固定连接,连接杆304
另一端与推块305外壁固定连接,推块305外壁与滑槽306内壁滑动连接,滑槽306开设在夹板2内部,夹板2内部设置有气压吹散清洁机构4;
25.气压吹散清洁机构4包括气槽b401、磁块a402,磁块a402与磁块b403相对一侧的磁性为异极,气槽b401开设在夹板2内部,磁块a402外壁固定连接在夹板2内部。
26.气压吹散清洁机构4还包括磁块b403、小夹块404,小夹块404内部开设有通气槽,通气槽内部与小夹块404内壁连通,弹性绳405、喷气孔406,喷气孔406内部与空腔内部连通,磁块b403外壁与小夹块404内壁滑动连接,夹板2内部开设有空腔,小夹块404外壁与空腔内壁滑动连接,磁块b403外壁与弹性绳405一端固定连接,弹性绳405另一端与小夹块404内壁一侧固定连接,喷气孔406开设在小夹块404内部。
27.在使用时,通过启动液压伸缩杆6推动液压夹紧机1与夹板2到指定货物位置,然后通过启动液压夹紧机1控制液压夹紧机1底部两个夹板2相互夹紧,对货物进行夹取,此时在夹板2对货物进行夹取的时候,夹板2内部的滑块301受到货物挤压而向夹板2内壁滑动,并挤压夹板2内壁的空气通过气槽a303喷出,从而对货物表面通过空气进行喷洒,将货物表面大量的灰尘与残渣吹散,保证货物表面的清洁,继而提升滑块301与货物之间接触的摩擦力,提升滑块301对货物的夹紧能力,同时在夹紧后,夹板2停止向内滑动夹紧,此时吸盘302对货物表面进行紧密接触,并对气槽a303与夹板2内壁进行空间密闭,继而可以在夹紧货物进行移动的时候,因为气槽a303与夹板2内壁的空气量为密闭,使得夹板2不会因为晃动而导致货物摇晃在滑块301表面打滑,而被吸盘302紧密吸住,也减少夹板2因为震动而松懈的问题出现,进一步提升夹紧后的摩擦力,同时滑块301被挤压向夹板2内壁滑动的时候,通过连接杆304推动推块305向滑槽306内壁推动,并推动滑槽306内部的空气进入气槽b401内,同时通过气槽b401进入夹板2内部的空腔中,对小夹块404进行推动挤压,小夹块404被推动挤压时在空腔内滑动,并通过小夹块404与滑块301同时与货物进行接触并夹紧,从而提升接触面积,进一步增加摩擦力,提升夹紧效果,同时在小夹块404被推出后,小夹块404内部的磁块b403逐渐远离磁块a402后,磁块b403与磁块a402之间的磁性消失了,磁块b403则瞬间受到弹性绳405的拉力将其拉动并瞬间挤压小夹块404内壁的空气通过喷气孔406瞬间推出,继而对货物表面进行高强度的气体喷洒,继而在吸盘302将货物表面的灰尘喷动滑落时,再次通过喷气孔406的高压强的气体将其喷散,保证了灰尘大量脱离货物表面,进一步提升了货物与滑块301之间的清洁无尘环境,避免了灰尘残存而打滑无法夹紧货物导致货物跌落的情况出现。
28.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。