1.入盒机爪手差速闭合抓取手爪,属于手套抓取设备技术领域。
背景技术:
2.叠放好的手套在转运时需要用到机械臂,原机械手臂部分手爪抓取100只手套,需待手套被推至抓取位置时再抓取,手套在到达指定定位置后,手套的抓取位置会自然下垂。这时,机械手臂的手爪同时向中间摆动,使手爪闭合夹紧手套,容易引起部分手套折叠。但是由于现有的手爪的上下两侧摆动的角度相同,为了使夹爪下部伸至自然下垂的手套底部,夹爪上部和下部的摆动角度要足够大,抓取厚度增加,手爪伺服电机经常报警。
技术实现要素:
3.本实用新型要解决的技术问题是:克服现有技术的不足,提供一种抓取稳定,且能够避免夹爪张开角度过大的入盒机爪手差速闭合抓取手爪。
4.本实用新型解决其技术问题所采用的技术方案是:该入盒机爪手差速闭合抓取手爪,其特征在于:包括主体、夹爪、第一传动装置以及第二传动装置,其中夹爪包括并排设置的第一夹爪和第二夹爪,第一夹爪和第二夹爪均可摆动的安装在主体上,第一传动装置的动力输入端和第二传动装置的动力输入端均与主体的动力输入部相连,第一传动装置的动力输出端与第一夹爪相连,第二传动装置的动力输出端与第二夹爪相连,第一夹爪的开合角度大于第二夹爪的开合角度。
5.优选的,所述的动力输入部为输入轴,输入轴可转动的安装在主体上,输入轴同时与第一传动装置的动力输入端和第二传动装置的动力输入端相连。
6.优选的,所述的第一传动装置和第二传动装置均为齿轮传动装置。
7.优选的,所述的第一传动装置包括相啮合的第一主动齿轮以及第一被动齿轮,第一主动齿轮与所述动力输入部相连,第一被动齿轮与第一夹爪相连;
8.所述的第二传动装置包括相啮合的第二主动齿轮以及第二被动齿轮,第二主动齿轮与所述动力输入部相连,第二被动齿轮与第二夹爪相连;
9.第二主动齿轮的齿数少于第一主动齿轮的齿数。
10.优选的,所述的第一传动装置还包括相啮合的第一主动锥齿轮以及第一被动锥齿轮,第一主动锥齿轮与第一被动齿轮相连,第一被动锥齿轮与第一夹爪相连。
11.优选的,所述的第二传动装置还包括相啮合的第二主动锥齿轮以及第二被动锥齿轮,第二主动锥齿轮与第二被动齿轮相连,第二被动锥齿轮与第二夹爪相连。
12.优选的,所述的第一夹爪的中部设置有用于容纳第一传动装置的动力输出端的安装槽,第二夹爪的中部也设置有用于容纳第二传动装置的动力输出端的安装槽。
13.与现有技术相比,本实用新型所具有的有益效果是:
14.本入盒机爪手差速闭合抓取手爪的第一传动装置带动第一夹爪摆动,第二传动装置带动第二夹爪摆动,第一夹爪的开合角度大于第二夹爪的开合角度,在夹取手套时,第一
夹爪伸至手套的下侧,第二夹爪位于手套的上侧,既能够避免第一夹爪与手套挤压而出现手套折叠的问题,又能够减小第一夹爪和第二夹爪的张开的角度,使抓取厚度减小,避免手爪伺服电机报警。
附图说明
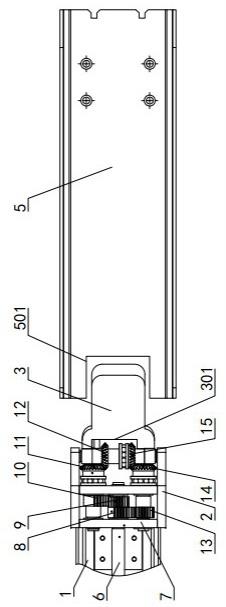
15.图1为入盒机爪手差速闭合抓取手爪的主视示意图。
16.图2为入盒机爪手差速闭合抓取手爪的俯视示意图。
17.图中:1、夹爪安装架2、夹爪支架3、夹爪301、安装槽4、手套5、手套模具501、让位槽6、输入轴7、齿轮箱8、第一主动齿轮9、第二主动齿轮10、第二被动齿轮11、第二主动锥齿轮12、第二被动锥齿轮13、第一被动齿轮14、第一主动锥齿轮15、第一被动锥齿轮。
具体实施方式
18.下面结合具体实施例对本实用新型做进一步说明,然而熟悉本领域的人们应当了解,在这里结合附图给出的详细说明是为了更好的解释,本实用新型的结构必然超出了有限的这些实施例,而对于一些等同替换方案或常见手段,本文不再做详细叙述,但仍属于本技术的保护范围。
19.图1~2是本实用新型的最佳实施例,下面结合附图1~2对本实用新型做进一步说明。
20.入盒机爪手差速闭合抓取手爪,包括主体、夹爪3、第一传动装置以及第二传动装置,其中夹爪3包括并排设置的第一夹爪和第二夹爪,第一夹爪和第二夹爪均可摆动的安装在主体上,第一传动装置的动力输入端和第二传动装置的动力输入端均与主体的动力输入部相连,第一传动装置的动力输出端与第一夹爪相连,第二传动装置的动力输出端与第二夹爪相连,第一夹爪的开合角度大于第二夹爪的开合角度。本入盒机爪手差速闭合抓取手爪的第一传动装置带动第一夹爪摆动,第二传动装置带动第二夹爪摆动,第一夹爪的开合角度大于第二夹爪的开合角度,在夹取手套时,第一夹爪伸至手套的下侧,第二夹爪位于手套的上侧,既能够避免第一夹爪与手套挤压而出现手套折叠的问题,又能够减小第一夹爪和第二夹爪的张开的角度,使抓取厚度减小,避免手爪伺服电机报警。
21.具体的:如图1所示:主体包括夹爪安装架1以及夹爪支架2,夹爪支架2的一端与夹爪安装架1固定连接,另一端安装夹爪3,即第一夹爪和第二夹爪均可摆动的安装在夹爪支架2上,在本实施例中,第二夹爪位于第一夹爪的正上方。
22.如图2所示:夹爪支架2上安装有齿轮箱7,齿轮箱7位于夹爪安装架1与夹爪3之间,第一传动装置和第二传动装置均安装在齿轮箱7内。动力输入部为输入轴6,输入轴6可转动的安装在夹爪安装架1上,且输入轴6的右端伸至齿轮箱7内,输入轴6位于齿轮箱7的中部。手爪伺服电机可以安装在手爪安装架1上,也可以安装在入盒机上,手爪伺服电机的输出轴与输入轴6相连,并带动输入轴6转动。第一传动装置和第二传动装置均为齿轮传动装置。
23.在第一夹爪的左端中部和第二夹爪的左端中部均设置有安装槽301。
24.第一传动装置包括第一主动齿轮8、第一被动齿轮13、第一主动锥齿轮14以及第一被动锥齿轮15,第一主动齿轮8同轴安装在输入轴6上,并随输入轴6同步转动,第一被动齿
轮13和第一主动锥齿轮14均位于齿轮箱7的下部,第一被动齿轮13和第一主动锥齿轮14均可转动的安装在齿轮箱7上,第一被动齿轮13位于第一主动齿轮8的下侧,且第一被动齿轮13与第一主动齿轮8相啮合,第一主动锥齿轮14与第一被动齿轮13同轴连接,并保持同步转动,第一被动锥齿轮15可转动的安装在齿轮箱7的右侧下部,第一被动锥齿轮15位于第一夹爪和第二夹爪的安装槽301内,避免第一被动锥齿轮15的安装受到第一夹爪和第二夹爪的妨碍,第一被动锥齿轮15与第一夹爪的左端相连,使第一夹爪随第一被动锥齿轮15的转动而同步摆动,第一被动锥齿轮15与第一主动锥齿轮14相啮合。
25.第二传动装置包括第二主动齿轮9、第二被动齿轮10、第二主动锥齿轮11以及第二被动锥齿轮12,第二主动齿轮9同轴安装在输入轴6上,并随输入轴6同步转动,第二主动齿轮9和第一主动齿轮8沿靠近夹爪安装架1的方向依次设置,第二被动齿轮10和第二主动锥齿轮11均位于齿轮箱7的上部,第二被动齿轮10和第二主动锥齿轮11均可转动的安装在齿轮箱7上,第二被动齿轮10位于第二主动齿轮9的上侧,且第二被动齿轮10与第二主动齿轮9相啮合,第二主动锥齿轮11与第二被动齿轮10同轴连接,并保持同步转动,第二被动锥齿轮12可转动的安装在齿轮箱7的右侧上部,第二被动锥齿轮12位于第一夹爪和第二夹爪的安装槽301内,避免第二被动锥齿轮12的安装受到第一夹爪和第二夹爪的妨碍,且第二被动锥齿轮12同轴设置在第一被动锥齿轮15的正上方,并与第一被动锥齿轮15间隔设置,第二被动锥齿轮12与第二夹爪的左端相连,使第二夹爪随第二被动锥齿轮12的转动而同步摆动。第一主动齿轮8的齿数大于第二主动齿轮9的齿数,使第一夹爪向下摆动角度大于第二夹爪向上的摆动角度,即第一夹爪的开合角度大于第二夹爪的开合角度。
26.如图1和2所示:本入盒机爪手差速闭合抓取手爪在使用时,需要与手套模具5配合,手套模具5为开口朝上的槽型,入盒机爪手差速闭合抓取手爪设置在手套模具5的端部一侧,手套模具5靠近入盒机爪手差速闭合抓取手爪的一端的中部设置有让位槽501,叠放好的手套4放置在手套模具5内,且手套的端部伸出手套模具5的左端,输入轴6带动第一主动齿轮8和第二主动齿轮9同步转动,第一主动齿轮8通过第一被动齿轮13、第一主动锥齿轮14以及第一被动锥齿轮15带动第一夹爪向下摆动,第二主动齿轮9通过第二被动齿轮10、第二主动锥齿轮11以及第二被动锥齿轮12带动第一夹爪向上摆动,由于第一主动齿轮8的齿数大于第二主动齿轮9的齿数,使第一夹爪向下摆动的角度大于第二夹爪向上摆动的角度,既能够避免第一夹爪与手套下垂的部位挤压,又能够避免手爪伺服电机报警,而且能够保证对手套的夹取可靠,第一夹爪和第二夹爪与让位槽501正对,避免对手套的夹取受到手套模具5的妨碍。
27.以上所述,仅是本实用新型的较佳实施例而已,并非是对本实用新型作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例。但是凡是未脱离本实用新型技术方案内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本实用新型技术方案的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
