带有可互换轴的内窥镜装置
1.优先权声明
2.本公开要求2019年10月7日提交的美国临时专利申请序列号no.62/911,749的优先权;其公开内容通过引用并入本文。
技术领域
3.本公开涉及一种内窥镜装置,该内窥镜装置具有可选择性地彼此联接(物理地和电气地)的独立轴和手柄部分。
背景技术:
4.如本领域中技术人员所理解的,内窥镜可以包括与手柄联接的柔性轴或刚性轴,该手柄包括用于其他设备的控制器和接口。内窥镜的控制可以经由手柄上的致动器(例如,按钮、偏转旋钮等)来实施,以偏转柔性轴的远侧末端,从而改变远侧末端相对于解剖结构的方位,以例如改变远侧末端上的摄像机提供的视图,从而对准从柔性轴的远侧端部推进的组织治疗或诊断装置。使用后,必须对整个可重复使用的柔性内窥镜(尤其是窥镜轴的工作通道)进行消毒,这可能是一个困难且耗时的过程。一次性窥镜可以被丢弃,并且部分一次性窥镜可以是更环保、更经济的,从而为每个患者提供新的无菌的基本的、无磨损的零件,或者在手术期间进行更换,以提供另一特征来治疗同一患者。
技术实现要素:
5.本公开涉及一种内窥镜装置,该内窥镜装置包括在操作上联接到轴壳的手柄主体。手柄主体包括用于控制内窥镜轴的从轴壳延伸的远侧端部的致动器。该装置还包括牵引线附接件,该牵引线附接件被构造为在操作上联接到牵引线,该牵引线穿过轴壳和内窥镜轴延伸到远侧端部。向牵引线施加张力会使内窥镜轴的远侧端部偏转。此外,该装置包括牵引机构,该牵引机构联接到致动器并且具有从其中延伸的牵引线附接件。当牵引线附接件在操作上联接到牵引线时,致动器的致动向牵引线施加张力并且使内窥镜轴的远侧端部偏转。
6.在一个实施例中,牵引机构为马达,并且致动器为按钮垫。
7.在一个实施例中,牵引机构为牵引轮,并且致动器为偏转旋钮,其中偏转旋钮的旋转使牵引轮旋转并且向近侧拉动牵引线附接件,并且当牵引线附接件在操作上联接到牵引线时,使内窥镜轴的远侧端部偏转。
8.在一个实施例中,手柄主体进一步包括闩锁,该闩锁具有从闩锁径向延伸的闩锁销,该闩锁销的大小和形状适于与轴壳中的销孔或狭槽联接。
9.在一个实施例中,i)闩锁从手柄主体径向向外延伸,并且闩锁销从闩锁径向向内延伸,或ii)闩锁凹陷到手柄主体中,并且闩锁销从闩锁径向向外延伸。
10.在一个实施例中,当轴壳包括狭槽时,手柄主体可相对于轴壳旋转,同时维持可操作联接,以使内窥镜轴的远侧端部偏转。
11.在一个实施例中,该装置进一步包括从手柄主体延伸的第一电气连接器,该第一电气连接器的大小和形状适于与轴壳中的第二电气连接器进行电气连接。
12.在一个实施例中,该装置进一步包括污染屏障,该污染屏障被构造为从手柄主体的近侧端部延伸到手柄主体的把手部分;以及把手,该把手被构造为在把手部分和污染屏障上展开,并且紧密装配到手柄主体上。
13.此外,本公开涉及一种内窥镜装置,该内窥镜装置包括在操作上联接到手柄主体的轴壳,手柄主体包括致动器;从轴壳向远端延伸的内窥镜轴,内窥镜轴的远侧端部具有摄像机;以及穿过轴壳和内窥镜轴延伸到远侧端部的牵引线,其中向牵引线施加张力会使内窥镜轴的远侧端部偏转,牵引线的近侧部分具有包围牵引线的护套和在护套近侧端部处的配件,该配件在操作上联接到牵引线附接件。当配件在操作上联接到牵引线附接件时,致动器的致动向近侧拉动牵引线附接件,从而向牵引线施加张力并且使内窥镜轴的远侧端部偏转。
14.在一个实施例中,轴壳包括销孔,该销孔的大小和形状适于与从手柄主体中的闩锁径向延伸的闩锁销联接。
15.在一个实施例中,轴壳包括围绕轴壳圆周的一部分延伸的狭槽,该狭槽的大小和形状适于与从手柄主体中的闩锁径向延伸的闩锁销联接,使得手柄主体可相对于轴壳旋转,同时维持可操作联接,以使内窥镜轴的远侧末端偏转。
16.在一个实施例中,狭槽为内径径向盲槽。
17.在一个实施例中,该装置进一步包括第一电气连接器,该第一电气连接器凹陷到轴壳中,并且其大小和形状适于与从手柄主体延伸的第二电气连接器进行电气连接。
18.在一个实施例中,第一电气连接器可相对于轴壳旋转。
19.在一个实施例中,该装置进一步包括污染屏障,该污染屏障被构造为当轴壳和手柄主体在操作上联接时,从轴壳的近侧端部向近侧延伸到手柄主体上。
20.此外,本发明涉及一种方法,该方法包括将手柄主体在操作上联接到轴壳,该手柄主体包括用于控制内窥镜轴的从轴壳延伸的远侧端部的致动器,该手柄主体具有联接到致动器的牵引机构,并且具有从其中延伸的牵引线附接件,该可操作联接包括将牵引线附接件联接到牵引线,该牵引线穿过轴壳和内窥镜轴延伸到内窥镜轴的远侧端部;以及致动致动器,使得向牵引线施加张力,并且使内窥镜轴的远侧端部偏转。
21.在一个实施例中,牵引机构为马达,并且致动器为按钮垫。
22.在一个实施例中,牵引机构为牵引轮,并且致动器为偏转旋钮。该方法进一步包括旋转偏转旋钮以旋转牵引轮,向近侧拉动牵引线附接件并且使内窥镜轴的远侧端部偏转。
23.在一个实施例中,手柄主体进一步包括闩锁,该闩锁具有从闩锁径向延伸的闩锁销,该闩锁销的大小和形状适于与轴壳中的销孔或狭槽联接。
24.在一个实施例中,i)闩锁从手柄主体径向向外延伸,并且闩锁销从闩锁径向向内延伸,或ii)闩锁凹陷到手柄主体中,并且闩锁销从闩锁径向向外延伸。
附图说明
25.图1示出了根据本公开第一示例性实施例的内窥镜可连接轴部分的侧视图。
26.图2示出了根据本公开第一示例性实施例的内窥镜可连接手柄部分的侧视图。
27.图3示出了图1-2中轴部分和手柄部分的等轴视图,其中线缆连接器从轴部分向近侧延伸。
28.图4a示出了根据本公开第二示例性实施例的具有可连接且可旋转的轴部分和手柄部分的内窥镜的侧视图。
29.图4b示出了图4a中内窥镜的前视图。
30.图5a示出了图4a中内窥镜的侧视图,其中轴和手柄部分连接在一起,并且沿着第一方向旋转。
31.图5b示出了图5a中旋转内窥镜的前视图。
32.图6a示出了图4a中内窥镜的侧视图,其中轴和手柄部分连接在一起,并且沿着第二方向旋转。
33.图6b示出了图6a中旋转内窥镜的前视图。
34.图7示出了具有内径径向盲槽的轴壳。
35.图8示出了用于可旋转轴壳的电气连接器。
36.图9示出了图2中手柄的侧视图,其带有用于附接牵引线的机构。
37.图10示出了图2中手柄的侧视图,其中轴部分的牵引线线缆连接到手柄中的线缆接收器。
38.图11示出了内部手柄机构的侧视图,该机构用于拉动附接的牵引线线缆并且使远侧末端偏转。
39.图12示出了图11中内部手柄机构的相对侧视图。
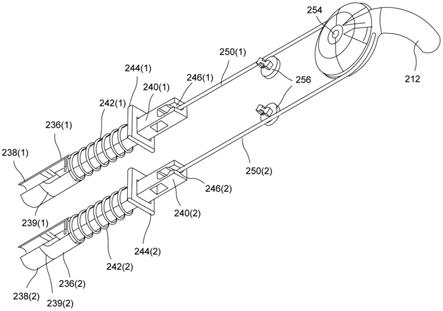
40.图13示出了图11中内部手柄机构的等轴视图。
具体实施方式
41.参考以下描述和附图,可以进一步理解本公开,其中相似的元件用相同的附图标记指代。示例性实施例描述了具有内窥镜轴的内窥镜装置(例如内窥镜),该内窥镜轴和与其相关联的内窥镜手柄分离。这准许将不同类型的手柄连接到不同类型的轴上。将描述各种实施例,包括壳体连接、电气连接,以及在包括具有可偏转远侧末端的窥镜轴的实施例中,牵引线连接。在一些实施例中,轴和手柄之间的连接允许手柄相对于轴旋转。内窥镜可以是完全一次性的,或者包括一些可重复使用的部件,而其它部件是一次性的。还描述了可以用于保护可重复使用的一个或更多个手柄部分免受污染的污染屏障。
42.该公开中所示的内窥镜为数字式柔性轴输尿管镜。然而,示例性实施例不限于此,并且可以适用于其他类型的窥镜,比如例如数字式膀胱镜。例如,所描述的手柄可以与多种类型的轴兼容,即同一手柄可以与被构造用于膀胱镜检查的轴结合使用,并且在之后的手术中,可以与被构造用于输尿管镜检查的轴结合使用。
43.图1-3示出了根据本公开各种示例性实施例的可连接内窥镜的轴部分100和手柄部分200。在本实施例中,描述了用于内窥镜的两个部分的特定连接器件,然而,依据内窥镜手术的特定要求,可以以下面描述的各种方式混合和匹配本文描述的不同特征。
44.轴部分100包括轴壳102,内窥镜轴104从该轴壳向远端延伸到远侧末端106。内窥镜轴104可以包括任何构造的工作通道,比如例如单腔工作通道、双腔工作通道、更大的单腔工作通道(例如用于除去肾结石)等。轴104可以包括传感器的任何组合,比如例如压力传
感器、温度传感器等或其组合,与这些传感器的连接穿过轴104、穿过工作通道或穿过一个或更多个管腔或夹在内窥镜轴104的外部。远侧末端106具有摄像机,在该实施例中,该摄像机具有在两个方向上完全偏转270
°
的能力,用于在手术期间改变解剖结构的视图。在其他实施例中,远侧末端106可以在四个方向上偏转,每个方向间隔90
°
(即,在0
°
、90
°
、180
°
和270
°
处)。在其他实施例中,轴104可以仅在单个方向上偏转,或者在不止两个方向上偏转。
45.t形连接器108从轴壳102延伸,并且提供两个端口,用于进入内窥镜轴104的一个或更多个工作通道。在该实施例中,第一端口108’和第二端口108”彼此垂直布置,其中第一端口面向远端和侧向(相对于轴壳102的纵向轴线l),并且第二端口面向近侧和侧向。附属装置(比如外部流量传感器或附加摄像机)或末端执行器装置(比如肾结石取出装置)可以穿过第一端口108’和第二端口108”中的任一个,然而,可能优选第二端口108”,因为它与内窥镜轴的工作通道对齐。端口108’垂直于工作通道,从而使得即使是柔性细长装置也几乎不可能通过,并且主要用于与工作通道的流体连通。在另一实施例中,y形连接器与都面向近侧的第一端口和第二端口一起使用,使得两个装置可以从y形连接器的近端位置进入内窥镜轴104的工作通道。
46.手柄部分200包括手柄主体202,该手柄主体包括把手部分204,操作的医生可以在该把手部分处握住手柄200。该实施例的把手部分204装配有c形或重叠把手206,该把手可以在使用后丢弃。重叠的把手206可以用在污染屏障上,下面将更详细地描述。手柄部分200可包括磁耦合器214,用于耦合到例如用于取出肾结石的lithovue
tm empower
tm
展开装置或其他附属装置。电源和数据线218从主体202的近侧端部延伸,连接器220位于线218的一端,用于连接到内窥镜装备,比如控制台。
47.在另一实施例中,手柄200可以由电池供电,并且具有蓝牙连接,因此不需要电源和数据线218。在该实施例中,电源和数据线218分叉,通信接口222(例如,usb连接器)从其中延伸。通信接口222可以用于将例如lithovue
tm empower
tm
展开装置连接到手柄200,以给展开装置供电并且与其交换数据。因此,数据可以从附接到手柄200的附属装置通过手柄200传递到控制台,例如,经由有线电源和数据线218连接或无线地。在其他实施例中,附属装置可以从控制台连接直接运行,并且绕过手柄200。此外,数据可以从轴部分100(例如,从摄像机)经由电气连接传递到手柄200,然后传递到控制台,下面将进一步详细描述。
48.给定的轴部分可以以多种方式与给定的手柄部分联接。在本实施例中,以以下的方式在轴壳102和手柄主体202之间进行壳体连接。然而,也将描述用于进行壳体连接的替代构造。
49.轴壳102在其近侧端部处限定凹陷部分122,当轴部分100和手柄部分200联接时,手柄主体202的远侧端部被接收在该凹陷部分内。在本实施例中,手柄主体202包括两个闩锁224,在该实施例中,该闩锁基本上为t形,并且在主体202的相对侧上从主体202径向向外延伸。每个闩锁224具有从t形的远侧端部径向向内延伸的闩锁销226,如图9-10中更详细可见。闩锁销226的大小适于接合轴壳102上相应的闩锁销孔124,如图3中可见。
50.在该实施例中,每个闩锁销226包括切入销226的斜面228,使得当销226在轴壳102上向远端滑动并且与闩锁销孔124对齐时,销斜面228便于闩锁销226围绕轴壳102的外表面偏转,直至到达并且卡入闩锁销孔124中。t形的近侧端部230可以用作杠杆,以将闩锁销226从闩锁销孔124中释放,并且使手柄主体202与轴壳102分离,于是手柄部分200被向近侧拉
动,以将手柄部分200从轴部分100处释放。可以优选用于手柄主体202的远侧端部的圆形轮廓,该圆形轮廓滑入轴壳102的圆形凹陷中,尽管这对于非旋转装置不是必需的。然而,圆形轮廓允许与旋转和非旋转装置兼容,下面将更详细地描述。
51.图4a-6b示出了轴壳300和手柄主体400,其利用了用于进行壳体连接的替代布置。除了其他差异,手柄主体400使用凹陷的销布置。所示用于手柄主体400的凹陷的销布置不限于与轴壳300的兼容性,即它可以以下述方式与设计不同的轴部分一起使用。
52.图4a示出了手柄主体400,其带有切入主体400的凹陷404中的悬臂闩锁402,闩锁402具有闩锁销406,用于将手柄主体400可定位地联接到相应轴壳。闩锁销406径向向外延伸,使得当较小直径的手柄主体400插入例如较大内径的轴壳300中时,闩锁销406接合径向狭槽302。通过压下沿着悬臂闩锁402定位的闩锁按钮408,手柄主体400可以推进到远端轴主体300中,从而使闩锁销406径向向内偏转,并且当闩锁销406位于狭槽302附近时释放闩锁按钮408。
53.尽管图4a所示的轴壳300具有径向狭槽302,用于接收两个相对的闩锁销406,但闩锁销孔也可以用于接收凹陷的销(比如闩锁销406),其方式类似于图1-3中关于轴部分100和手柄部分200所述的方式。虽然图1-3描述了径向向内指向的接合轴壳外径上的闩锁销孔的销,但是相同的原理可以应用于径向向外指向的接合轴壳内径上的闩锁销孔的销。
54.当轴壳对两个相对闩锁销中的每一个都配有一个销孔时,轴壳和手柄主体不可旋转地彼此联接。然而,具有狭槽(比如轴壳300的径向狭槽302)的轴壳允许手柄部分和轴部分之间以各种方式(比如下面描述的方式)旋转。
55.图4a-6b示出了轴壳300,其具有两个径向狭槽302,用于接合手柄主体400的闩锁销406。图4b示出了轴壳300相对于手柄主体400的初始定位的横截面,即非旋转位置。在该实施例中,狭槽302完全延伸穿过轴壳300的直径,并且允许略微小于180度的旋转。换句话说,狭槽302几乎围绕轴壳300的整个圆周延伸,除了界定狭槽302的壳体的两个小部段之外,准许闩锁销406从接近180度的狭槽302的一个边缘旋转到相对边缘。然而,在轴壳的另一实施例中,径向狭槽可以小于完整的180度。
56.在图4a-6b所示的实施例中,轴壳300也可以在最初围绕轴线g旋转180度时附接到手柄部分400上。在该实施例中,如果轴部分的工作通道与t形连接器312流体连通,则t形连接器312与轴壳充分成角度,以在握住手柄的同时不妨碍使用者抓握的手。图5b示出了相对于手柄主体400沿着f箭头的方向旋转的轴壳300的横截面,而图6b示出了相对于手柄主体400沿着h箭头的方向旋转的轴壳的横截面。
57.在图7所示的另一实施例中,轴壳500中的径向狭槽502为内径径向c形盲槽。换句话说,狭槽502径向延伸一定深度,并且不穿过轴壳500的整个壁。在该实施例中,将使用单个闩锁销来代替相对于手柄主体400所示的两个闩锁销406。内径径向盲槽502允许接近360度的最大旋转。此外,盲槽502后面的材料除了覆盖狭槽502之外还加强了结构。轴壳500具有内部斜面504,下面将关于电气连接进一步描述。在另一实施例中,仍然参考图7。狭槽502是螺旋螺纹构造,例如1 1
/4圈允许轴104旋转超过360
°
,但是将旋转限制到450
°
。bowden线缆系统(牵引线和护套系统)将允许手柄部分和轴部分之间的旋转和延伸,同时使柔性轴106偏转,如下所述。
58.在其他实施例中,具有径向狭槽的轴壳可以选择性地地锁定,使得使用者可以将
轴部分锁定在相对于手柄部分的所需旋转方位处。在一个实施例中,如图4a所示,手柄主体400具有销锁410,该销锁可以经由销按钮412向远端推进,以联接到轴壳300中的孔锁304。以这种方式,当闩锁销406在狭槽302内自由旋转时,销锁410以选定的旋转方位不可旋转地将手柄主体400与轴壳300接合。在另一实施例中,轴壳具有围绕主体圆周的多个销锁,使得轴壳和手柄可以设定在多个选定旋转方位中的任一个处。在又一实施例中,销锁可以围绕轴壳圆周的一部分延伸,使得轴壳的旋转被限制在狭槽的长度内。在其他实施例中,可以使用棘轮、棘爪、干涉装配或其他合适的连接来代替锁,以暂时保持轴壳的旋转,如本领域中技术人员所理解的。
59.轴部分和手柄部分联接时的第二种连接是电气连接。电气连接在轴和手柄部分之间传送电力以及数据。例如,内窥镜轴104的远侧末端106处的摄像机可以经由电气连接与手柄部分200交换数据并且由该手柄部分供电,手柄部分200经由例如电源和数据线218或电池供电。
60.在图1-3所示的实施例中,第一电气连接器232从手柄主体202向远端延伸,并且其大小和形状适于插入轴壳102的凹陷部分122的远侧端部处的第二电气连接器(未示出)中。尽管第二电气连接器未在图1-3的视图中示出,但是用于手柄主体202的第二电气连接器是与第一电气连接器232的形状相对应的凹陷,并且可以看起来与图8中关于可旋转实施例所示的第二电气连接器306类似。
61.在不可旋转的实施例中,第一电气连接器232和第二电气连接器可以是任何形状,即方形、矩形、圆形等。因为在本实施例中,轴部分100和手柄部分200相对于彼此不可旋转,所以这两个部分之间的电气连接不需要旋转,这与下面将要描述的可旋转实施例不同。第二电气连接器126用o形圈(未示出)流体密封,以防止来自内窥镜手术的任何流体污染,该未示出的o形圈类似于图8所示的o形圈308。o形圈308可以由完美零件(prefect parts)模制而成,以在手柄部分200不旋转时形成密封来保持电子器件干燥。在另一实施例中,弹性体密封件可以用于形成密封。
62.在图4a-6b所示的实施例中,轴壳300和手柄主体400相对彼此可旋转,因此电气连接也可旋转。在该实施例中,轴壳300中的第二电气连接器306可以旋转,而手柄主体400中的第一电气连接器414保持固定,从而允许包括轴壳300的整个轴部分相对于包括手柄主体400的手柄部分旋转。轴壳300和手柄主体400的旋转受到限制,使得牵引线和电线不会由于一个方向上的连续旋转而扭断。
63.第二电气连接器306在旋转上被定位成在图4a-4b所示的方位上与非旋转的第一电气连接器414联接。这种初始定向(比如图8所示的)可以使用轴壳300中的内部斜面310来初始建立,关于内部斜面504,图7中最清楚地示出了该内部斜面310的示例。尽管在图7中仅示出了一个内部斜面310,但是与两个闩锁销相对应的两个内部斜面可以用于将手柄主体400配合到轴壳300上,例如,配合到轴壳300的相对侧上。内部斜面310可以定向闩锁销406,使得第一和第二电气连接器414、306也正确定向。当手柄主体400的远侧端部插入到轴壳300的近侧端部中时,销斜面使得闩锁销压入到轴壳的内径中,然后卡入/延伸到径向狭槽302中,从而形成锁定(防止在近端或远端方向上的移动),但是允许轴壳300和相关联的轴相对于手柄旋转。
64.通过按下闩锁按钮408以使闩锁销406与径向狭槽302分离,并且通过向近侧抽出
手柄主体400,可以拆卸手柄部分和轴部分。然而,如果在该手术之后要重新附接轴,那么在拆卸之前,应将轴壳300旋转回到其初始附接位置,使得第二电气连接器306旋转到其初始位置,用于之后重新附接。
65.轴部分和手柄部分之间的第三种连接是牵引线连接。这种连接仅适用于具有利用牵引线使远侧末端偏转的偏转远侧末端的内窥镜。
66.图1-3所示的实施例包括马达208,用于当远端部分100和手柄部分200联接时实施远侧末端106的偏转。如本领域中技术人员将理解的,马达208可以由按钮垫210或由手动偏转旋钮212致动。在一些情况下,如果在手术期间内窥镜断电,那么手动偏转旋钮212可以充当远侧末端106的备用控制器件。在这种情况下,如果在断电时远侧末端106处于偏转位置,那么在将轴104从主体上移除之前,可以经由偏转旋钮212将其返回到笔直位置。在其他情况下,可以仅使用偏转旋钮或按钮垫。当附属装置与内窥镜一起使用时,按钮垫210可以进一步用于控制某些附属装置。然而,远侧末端106和/或附属装置的控制可以通过其他方式实施。例如,可以使用外部控制器件(比如控制台)。
67.在图1-3所示的实施例中,内窥镜轴104的远侧末端106可经由轴104内部的两根牵引线偏转。单根牵引线可以使轴在一个方向上偏转,而任何额外数量的牵引线允许在额外的方向上偏转(例如,四根牵引线允许在四个方向上偏转)。轴部分100的两根牵引线可以经由延伸出轴壳102的近侧端部的两根牵引线线缆110连接到手柄部分200。每根线缆110包括包围其内牵引线的护套111,并且延伸出轴壳102的近侧端部直到牵引线连接器接头112,该牵引线连接器接头被构造为与手柄部分200联接,如图3、9-10所示,其方式将在下面详细描述。护套111的长度可以延伸,以附接到接头接收器234,如下所述。在一个实施例中,护套111的远侧端部可以是曲形、松弛和弓形(类似于图7)中的一种,以允许护套111在轴壳102旋转时缠绕在接头接收器234(下面详细描述)周围。
68.在该实施例中,每个牵引线接头112包括远侧垫圈114、靠近垫圈114的套环118、将垫圈114与套环118分开的间隔件116以及附接到套环118近端侧的手柄120。在该实施例中,垫圈114是相对于套环118直径较小的圆盘。通过首先将垫圈114滑动到牵引线上,使得垫圈114的远端侧邻接护套111的近侧端部,接着将套环118(具有附接的间隔件116)滑动到牵引线上,使得间隔件116邻接垫圈114的近端侧,并且将套环118附接到牵引线,从而将牵引接头112附接到线缆110上。通过卷曲、钎焊或本领域中技术人员将理解的其他合适的附接方式,在轻微的牵引线张力下,将套环118附接到牵引线上。套环118和牵引线彼此固定,而垫圈114可以与套环118分离。在另一实施例中,护套111和垫圈114被模制成单件。在另一实施例中,间隔件116和套环118被模制成单件。
69.该实施例中的牵引线接头112由接头接收器234接收,如图9所示。接头接收器234包括尺寸和形状适于接收套环118的套环接收器236以及远离套环接收器236的止挡块238,止挡块238具有远端侧237和近端侧239,u形通道延伸穿过其中,以在牵引线接头112联接到接头接收器234时接收间隔件116。止挡块238内置在手柄主体202中,即处于固定位置,而套环接收器236是可滑动的。套环接收器236可以相对于手柄主体202向近侧拉动。
70.套环接收器236具有从其中向近侧延伸到手柄主体202中的轴240,包围轴240的弹簧242将套环接收器236向远端位置偏压。弹簧242在套环接收器236和轴240延伸穿过的固定手柄壁244之间延伸。因此,当向近侧拉动套环接收器236时,弹簧242在套环接收器236和
手柄壁244之间压缩,这将在下面参考图11-13更详细地描述。
71.图10示出了联接到接头接收器234的牵引线接头112。垫圈114的近端侧邻近止挡块238的远端侧237放置,间隔件116延伸穿过止挡块238中的通道,并且套环118放置在套环接收器236中。在一些实施例中,套环118卡扣装配到套环接收器236中。如果在附接牵引线接头112时将套环接收器236从止挡块238处滑开,那么套环118上的手柄120可以向近侧拉动(将套环118与垫圈114分开)以将套环118和套环接收器236装配在一起。当例如轴部分100和手柄部分200彼此分离时,手柄120也可以用于将套环118从套环接收器236上移除。
72.当向近侧拉动套环接收器236时,套环118卡入其在间隔件116和手柄120之间的位置。垫圈114邻接远端侧237,以防止护套111向近侧推进,从而允许套环118与近端侧239分开,以使牵引线在近端方向上移位。机械力或能量通过牵引线相对于护套111的移动来传递。牵引线的机械力/移动被局限在护套111的路径中并且沿着该路径行进,以使机械力的损失最小化。
73.图11-13示出了当轴部分100和手柄部分200连接时,用于拉动牵引线以控制内窥镜轴104的远侧末端106偏转的机构。在该实施例中,内窥轴104具有两根牵引线,用于使远侧末端106在两个相反方向上偏转。因此,轴部分100具有两根线缆100,该线缆具有牵引线接头112,用于附接到两个接头接收器234(以及相关联的轴240、弹簧242等),即第一接头接收器234(1)和第二接头接收器234(2)。牵引线接头112和接头接收器234可以进行颜色编码或以其他方式识别,以实现正确的连接。
74.每个接头接收器234都具有套环接收器236,轴240向近侧延伸穿过手柄壁244上的孔(即第一轴240(1)延伸穿过第一壁244(1),并且第二轴240(2)延伸穿过第二壁244(2))。第一轴240(1)和第二轴240(2)的近侧端部通过单根坚固的手柄牵引线250联接。每个轴240具有凹槽246和直径小于凹槽246的u形狭槽248。在该实施例中,为了将手柄牵引线250附接到轴240(1)上,牵引线250的第一端被压接,并且第一压接部分252(1)被接收在第一凹槽246(1)中,手柄牵引线250靠近第一压接部分252(1)的部分延伸穿过第一u形狭槽248(1)。以相同的方式,牵引线250的第二端被压接,并且第二压接部分252(2)被接收在第二凹槽246(2)中,手柄牵引线250靠近第二压接部分252(2)的部分延伸穿过第二u形狭槽248(2)。
75.在该实施例中,内窥镜轴104中的牵引线由偏转旋钮212控制。偏转旋钮212形成有牵引轮254或以其他方式附接到该牵引轮上,手柄牵引线250围绕牵引轮254延伸。手柄牵引线250的中点通过热熔、螺钉或一些其它附接方式固定到牵引轮254上。手柄牵引线250在与牵引轮254的附接点两侧的部分,即250(1)和250(2),通过滑轮256支撑在轴240和牵引轮254之间。此外,当牵引线250的第一侧(例如牵引线部分250(1))处于张力下,并且牵引线250的第二侧(例如牵引线部分250(2))被压缩/松弛时,滑轮256防止牵引线部分250(2)不必要地移动到手柄主体202的内部中。
76.当轴部分100和手柄部分200完全连接时,可以经由偏转旋钮212旋转滑轮254,以使内窥镜轴104的远侧末端106沿着所需方向偏转到所需程度。当偏转旋钮212沿着箭头n的方向旋转时,牵引线部分250(1)置于张力下并且向近侧拉动第一套环接收器236(1),其随着套环接收器236(1)向近侧移动而压缩弹簧242(1)。当在向近侧拉动期间将第一套环118装配到套环接收器236(1)中时,装配有第一套环118的内窥镜轴104中的牵引线也被向近侧拉动,从而将第一套环118与第一垫圈114分开,并且使远侧末端106在第一方向上偏转。换
句话说,第一线缆110的护套111保持在固定位置,同时向近侧拉动其中的牵引线。
77.在牵引轮254的另一侧,第二牵引线部分250(2)压缩/松弛,因为当第二套环接收器236(2)邻接第二固定止挡块238(2)的近端侧239(2)时,其附接的轴240(2)不能沿着远端方向移动。以类似的方式,当偏转旋钮212沿着箭头m的方向旋转时,牵引线部分250(2)置于张力下并且向近侧拉动套环接收器236(2),从而向近侧拉动第二线缆110内的牵引线,当第一套环接收器236(1)邻接第一固定止挡块238(1)的近端侧239(1)时,压缩/松弛第一牵引线部分250(1)并且压缩第二弹簧242(2)
78.可以看出,图11-13中描述的内部手柄机构可以应用于可旋转内窥镜以及不可旋转内窥镜。也就是说,旋转轴部分100也将旋转轴部分100内牵引线的方位。然而,线缆连接110提供了柔性,使得牵引线接头112和接头接收器234之间的连接保持在适当的位置,接头接收器234的近侧运动仍然能够完成如上所述的拉动牵引线的任务。
79.在一些实施例中,使用一个或两个污染屏障来覆盖手柄,并且保护该手柄在使用期间免受污染。关于图1-3,第一污染屏障128被示出为在轴壳102的近侧端部处,并且第二污染屏障258附接到线218的近侧端部。第二屏障258(附接到线218以从近侧端部覆盖手柄主体202)最常用于在内窥镜手术期间在更换轴时保护手柄200,因为第一屏障128和轴部分100在远端被移除/更换。在其他实施例中,第二屏障258用作安全屏障。
80.通过电池运行的蓝牙手柄不需要电源和数据线218,因此第二污染屏障258优选在近侧端部处封闭。打开的第二污染屏障258的另一端可以从近侧端部插入/拉过手柄主体200,以提供覆盖手柄的第一层屏障。然后,第一污染屏障128可以在手柄200上从远侧端部拉到近侧端部,以与第二污染屏障重叠。c形把手206可以在两个屏障上展开,并且允许在手柄把手部分上恢复到其标称状态,以将下方的屏障固定在适当位置。c形把手206在使用后被丢弃。屏障可以松散地或紧密地装配到手柄上,并且可以系到壳体、手柄或线上,也可以用胶带、夹子、带子等装配。污染屏障可以是聚合物或弹性体,并且可以将污染物阻挡在外以及将污染物保持在内或包括在内。
81.所示手柄200可以代表不同类型的手柄,但不限于所示的手柄/特征,比如通过按钮操作的电动手柄、经由偏转旋钮操作的手动手柄等。此外,在本实施例中,手柄200可以经由枢转接头216从笔直把手转换成手枪式把手(即,l形)。手柄200靠近枢转接头216的部分可以相对于手柄200远离枢转接头216的部分沿着箭头s的方向旋转,以将手柄200转变成手枪式把手。
82.类似于笔直把手,手枪式把手可以通过在滑轮256周围沿周向延伸的通道来传递机械力或能量,以将牵引线维持在滑轮256上,或通过使用bowden线缆系统。在bowden线缆系统中,护套111将牵引线的移动局限于护套111的管腔内,以通过牵引线相对于护套111的移动来传递机械力或能量。护套111的总长度是恒定的,即使护套111在手枪式把手中扭曲或移动,从而允许轴部分100和手柄部分200相对于彼此移动。
83.附图标记
84.·
100 轴部分
85.·
102 轴壳
86.·
104 内窥镜轴
87.·
106 远侧末端
88.·
108t 形连接器
89.·
110 牵引线线缆
90.·
111 牵引线护套
91.·
112 牵引线接头
92.·
114 垫圈
93.·
116 间隔件
94.·
118 套环
95.·
120 手柄
96.·
122 凹陷部分
97.·
124 闩锁销孔
98.·
126 第二电气连接器
99.·
128 第一污染屏障
100.·
200 手柄部分
101.·
202 手柄主体
102.·
204 把手部分
103.·
206 重叠把手
104.·
208 马达
105.·
210 按钮垫
106.·
212 偏转旋钮
107.·
214 磁耦合器
108.·
216 枢转接头
109.·
218 电源和数据线
110.·
220 连接器
111.·
222 通信接口
112.·
224 闩锁
113.·
226 闩锁销
114.·
228 斜面
115.·
230 近侧端部(闩锁的)
116.·
232 第一电气连接器
117.·
234 接头接收器
118.·
236 套环接收器
119.·
237 止挡块的远端侧
120.·
238 止挡块
121.·
239 止挡块的近端侧
122.·
240 轴(套环接收器)
123.·
242 弹簧
124.·
244 手柄壁
125.·
246 凹槽
126.·
248 u形狭槽
127.·
250 手柄牵引线
128.·
252 压接部分
129.·
254 牵引轮
130.·
256 滑轮
131.·
258 第二污染屏障
132.·
300 轴壳
133.·
302 径向狭槽
134.·
304 孔锁
135.·
306 第二电气连接器
136.·
308 o形圈
137.·
310 内部斜面
138.·
312 t形连接器
139.·
400 手柄主体
140.·
402 闩锁
141.·
404 凹陷
142.·
406 闩锁销
143.·
408 闩锁按钮
144.·
410 销锁
145.·
412 销按钮
146.·
414 第一电气连接器
147.·
500 轴壳
148.·
502 盲槽
149.·
504 内部斜面
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
