1.本发明涉及一种用于包装蛋的包装装置。这种装置在现有技术中是已知的。在这些装置中,蛋通过电池盒的输送系统被输送到包装装置。在那里,蛋以并列布置的方式与多个蛋一起经由环形输送机输送到包装装置,并经由承载装置放置在包装中。并列在输送机上的蛋的数量对应于相应包装中的隔室的数量。已知的辊子输送机具有直径变化的辊子。在每种情况下,蛋位于在两个辊子的在直径最小的位置处之间。无论使用食用蛋还是孵化蛋,蛋在包装材料中的取向都是。对于食用蛋,重要的是蛋被包装尖头朝下以便使蛋黄居中。如果孵化蛋没有正确定向,甚至不可能在培养箱中孵化它。利用已知的包装装置,蛋在辊子输送机上在优选的方向上定向,该辊子输送机包括环形系列的相互间隔开的辊子,在本文件中简称为环形辊子输送机。然而,在将蛋供给到辊子输送机的速度下难以实现100%可靠的定向。已知在将蛋从辊子输送机传送到包装时执行附加的定向步骤。
背景技术:
2.利用已知的包装装置,硅树脂盘位于辊子输送机的相反侧之上和附近。辊子实际上沿着整个输送轨道旋转。然而,在相反侧附近,停止旋转。在使用中,硅树脂盘位于蛋的路径中。通过的蛋被硅酮盘接合,使得它们的尖头在它们从辊子输送机掉落之前被引导到运输方向,或者它们在蛋承载器中掉落,从而以尖头朝下的方式定位。
3.利用另一种已知的装置,凸轮设置在输送机轨道的下侧,靠近辊子输送机的相反侧,从而通过的蛋被凸轮轻微地抬起。在输送机轨道上方,设置有销,该销在蛋从辊子输送机落下时转动蛋,以便将蛋的尖头朝下定位。
4.已知装置的一个显著缺点是,用于定向蛋的特征完全是静态的。结果,这种特征对蛋的影响取决于相应蛋的尺寸。换句话说,已知的装置不适于正确和可靠地定位不同大小的蛋的尖头朝下。因此,在实践中,已知的装置仅使得70%至90%的蛋实现尖头朝下正确的定位。
技术实现要素:
5.因此,本发明的一个目的是提供一种包装装置,其提供比已知的包装装置更可靠的蛋尖头朝下的定位。为此,本发明提供一种根据权利要求1所述的包装装置。在本文件中,术语“相反侧
″
被理解为是指在实际输送轨道的端部处的弯曲部,其中互连的辊子的运输方向被颠倒,并且其中蛋从辊子输送机落下。当使用包装装置时,辊子输送机在承载装置的方向运输蛋。辊子优选地通过驱动输送链在端部处彼此连接,并且优选地设置有齿,在使用中,该齿与位于输送机轨道的任一侧上的齿轮齿条接合,结果,当辊子输送机运动时,辊子旋转。当两个辊子接近辊子输送机的相反侧时,辊子继续旋转,辊子输送机的速度暂时增加,并且位于两个辊子的狭窄段之间的蛋被将蛋提升0.5mm至3mm的蛋提升器接合。由于已知的蛋的不对称形状,蛋保持与通过其尖头承载相应蛋的两个旋转辊子接触,并且在蛋的钝端处失去与辊子的接触。因此,蛋与旋转辊子保持接触的尖头(至少比蛋的钝端长)加速,
并且蛋的钝端相对于该尖头跟在后头,并且蛋在即将落到蛋承载器中之前,蛋以其在运输方向上的尖头被引导。蛋承载器捕获从辊子输送机落下的蛋,蛋的尖头向前并因此向下,随后将蛋移动到位于蛋承载器下方并要填充蛋的包装件,以便将蛋放置到这些包装件中。由辊子驱动的蛋的旋转确保了动态定位尖头朝下,并且由于动态以及在定位尖头朝下期间与蛋的相互作用,蛋的旋转对蛋尺寸的变化不如已知的装置敏感。因此,实现了本发明的目的。
6.在本发明的优选实施方式中,辊子的窄段在一定长度上具有至少基本上恒定的直径,从窄段看,窄段的侧面是具有逐渐增加的直径的两个部分。一方面,这种几何形状在运输通过输送机的期间为蛋提供良好的滚动表面。倾斜部分使蛋在辊子输送机的宽度上保持有序,尤其是相对于蛋承载器,在蛋承载器处蛋从辊子输送机落下。此外,倾斜部分适于刚好在蛋落入蛋承载器之前接合和旋转蛋,以便实现该位置尖头朝下。
7.从辊子的纵向看,较窄部分优选地沿着位于25至35mm的范围内,优选地在28至32mm的范围内的长度延伸,使得用于标准尺寸的鸡蛋的蛋可以由辊子承载。倾斜部分的倾斜角度优选地在7度和35度之间,更优选地在12度和25度之间,还更优选地在15度和20度之间,以确保当相应的蛋被凸轮提升时与蛋的令人满意的接合。如果需要,可以使用其它尺寸来处理其它动物的蛋。
8.辊子优选地由塑料制成,优选地具有低摩擦系数。例如,hmpe是非常合适的材料。不仅因为由hmpe制成的辊子可以在蛋落下之前对蛋的尖头施加适当的加速度。此外,因为蛋清和蛋黄不会粘在其上,所以辊子可以容易地保持清洁。
9.优选地,至少一个运输辊子的直径在40mm和55mm之间,更优选地在45mm和50mm之间。位于所述范围内的直径有助于蛋在朝向落下通过期间的定向。这导致蛋相对于收集落下的蛋的蛋承载器正确地定向。运输辊子优选地具有12个齿x1/2″
。
10.在优选实施方式中,驱动轮具有多边形的形状,优选地为具有圆角的三角形。这种形状使得驱动轮能够以可变速度驱动运输辊子并从而驱动辊子输送机,而不必电子地控制可变速度。与电子驱动器相比,机械驱动器使得该设备更少地出现故障。
11.优选的是,承载装置被设计成多个,优选地在三个和十二个之间,更优选地为六个,每个承载装置包括两个蛋承载器,两个蛋承载器可以以往复方式彼此远离地并且朝向彼此移动。在这种情况下,所述多个蛋适于待包装蛋的包装。蛋承载器的数量优选地对应于辊子的窄段的数量。
12.在承载装置的第一位置中或承载装置的第一位置附近,蛋承载器处于朝向底部关闭的收集位置。蛋承载器通常包括两个可相互移动的部件,每个部件部分地对应于蛋壳的轮廓。在顶部,部件移动分开,以便收集从辊子输送机落下的蛋,然后再次一起移动,以便在蛋向包装移动的同时以可靠的方式保持蛋。蛋承载器的部件也在宽度方向上移动,在这种情况下,它们在收集位置相对远离,对应于辊子的窄部件的位置。在它们将蛋放置在包装中的位置,它们相对靠近在一起,对应于包装中的凹部,蛋将放置在凹部中。
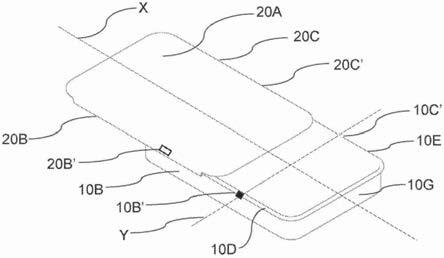
13.蛋承载器包括纵向轴线,至少在蛋承载器被定位成收集从辊子输送机落下的蛋的情况下,该纵向轴线相对于蛋输送机的垂直方向以优选地10至30度,更优选地15至25度的角度延伸。结果,确保了落下的蛋被可靠地收集并且保持或至少优化定位的尖头朝下。
14.在承载装置的第二位置中或承载装置的第二位置附近,蛋承载器优选地处于朝向
底部敞开的承载位置。在这种情况下,可移动部件打开,以便将来自蛋承载器的蛋放入包装中。
15.优选的是,蛋提升器设置有球形顶侧,球形顶侧优选地对应于直径在8mm至12mm,更优选地为9mm至11mm的范围内的球体。球形顶侧优选地具有半径r5并为蛋提供接触表面,结果蛋逐渐地被提升。此外,这种接触表面提供了柔性,这意味着其适于提升不同直径的蛋,只要它们相对于输送机轨道正确定位即可。
16.可替换地,蛋提升器的顶侧设置有倾斜表面,倾斜表面优选地具有相对于水平线成在从20度到40度的范围内,更优选地在从25度到35度的范围内的角度的斜面。用于蛋的这种接触表面具有类似于上述球形接触表面的优点的优点。
附图说明
17.本发明将参照附图中所示的根据本发明的包装装置的优选实施方式进行更详细的说明,其中:
18.图1示出了根据本发明的用于包装蛋的包装机1的立体图;
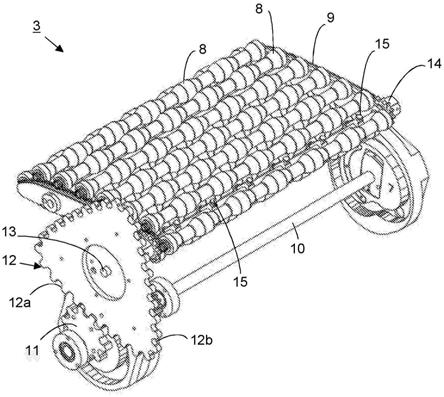
19.图2示出了来自图1的包装机的辊子输送机的立体图;
20.图3示出了来自图2的辊子输送机的辊子的前视图;
21.图4示出了结合来自图2的辊子输送机的凸轮件的纵向剖视图;
22.图5a至图5c示出了来自图2的辊子输送机的操作期间蛋的三个位置;
23.图6a示出了来自图1的包装装置的承载装置的立体图;
24.图6b示出了来自图6a的部件的立体图;
25.图6c示出了来自图6a和图6b中的蛋承载器的侧视图。
26.图7a示出了来自图1的包装机的辊子输送机和承载装置之间的相互作用的立体图;
27.图7b示出了来自图7a的装置的俯视图;以及
28.图7c示出了沿着图7b的线b-b的垂直纵向剖视图;
29.在附图中,相同的附图标记总是指相同的元件。为了避免不必要的重复,对每个单个数字,不会再次引入这些元件。
具体实施方式
30.图1示出了根据本发明的用于包装蛋的包装机1的立体图。首先,将一般地讨论包装机1的工作原理,随后将更详细地解释与本发明相关的元件。包装机1具有供应带2,供应带2被构造成环形带式输送机。在运输方向(箭头p)上观察,在供应带2的末端,蛋被定向,使得当蛋被转移到辊子输送机3时,尽可能多地尖头朝下定位。这种定向操作对于本发明的目的是不相关的。重要的是这样的事实,即该定向操作不能完美地工作,从而不是辊子输送机3上的所有蛋都被定位尖头朝下。在蛋的运输方向上看,在辊子输送机3的端部处,蛋从辊子输送机3落下并通过承载装置4收集。承载装置4向下运输蛋,并且然后将蛋放置在包装5中的一个中,在承载装置4下面的包装带6运输到卸料带7,卸料带7移除包装的蛋。
31.图2示出了来自图1的包装机1的辊子输送机3的立体图。辊子输送机3由多个辊子8组成,这些辊子8通过环形链9彼此连接成环形系列。齿轮11附接到驱动轴10上。当驱动轴10
旋转时,齿轮11同向旋转,并且在这种情况下与形成驱动轮的“三角形
″
齿轮12啮合。当齿轮11的齿与齿轮12的长侧边12a中的一个上的齿啮合时,齿轮12相对较慢地旋转。当齿轮11的齿与齿轮12的角12b上的齿啮合时,齿轮12相对快速地旋转。齿轮12附接到链驱动轴13和链齿轮14,链齿轮14形成两个运输辊子并驱动辊子输送机3的链9。因此,以机械方式实现辊子输送机3的加速和减速旋转。
32.辊子输送机的辊子8彼此平行地延伸,并且都具有如图4所示的特征形状。在该示例性实施方式中,辊子8具有六个具有恒定截面的窄部分8a,窄部分8a沿着29.5mm的长度延伸,窄部分8a的侧面是倾斜部分8b。倾斜部分8b在相应的窄部分8a的任一侧上相对于相邻的窄部分8a以角度α延伸。与两个相邻窄部分8a相关联的两个相邻倾斜部分8b通过加宽的部分8c彼此连接。
33.在该示例性实施方式中,六个凸轮件15附接到辊子输送机3的链条驱动轴13上。在该示例性实施方式中,凸轮的数量为三个,对应于形成驱动轮的齿轮12的三个侧边。凸轮件15每个位于链条驱动轴13上对应于辊子输送机3的辊子8的窄部分8a的位置中。图3示出了凸轮件15的纵向截面。凸轮件15具有本体16,在本体16中设有孔17,连接到本体16上的链驱动轴13延伸穿过孔17并且驱动凸轮件旋转。从孔17的中心看,用作辊子输送机的蛋提升器的三个凸轮18围绕本体16的周边延伸。从孔17的中心测量,凸轮从该中心延伸达26mm。凸轮18在相对于其长度的横向方向上的截面是圆形的并且具有10mm的直径。凸轮18以这样一种方式装配到链驱动轴13上,即它们基本上对应于链齿轮14的角部,并且当三角形齿轮12旋转时,它们总是在两个相邻辊子8之间的空间中延伸。凸轮具有圆头19(r5),圆头19延伸到两个相邻辊子8之间的空间中,使得由两个相邻辊子8承载的蛋被提升0.5mm至3mm。下面参考图5更详细地解释这一点。
34.图5a至图5c示出了来自图2的辊子输送机的操作过程中蛋的三个位置。在操作中,蛋位于两个相邻辊子8的窄部分8a之间的每个开放空间中。图5a至图5c仅示出了用于解释本发明的目的的两个蛋的运输。实际上,在操作中,六个顶辊子5之间将存在五倍的六个蛋。
35.在图5a中,两个蛋位于辊子输送机3上,在该位置蛋将在承载装置(图5中未示出)中落下。从运输方向(箭头p)看,位于前方的蛋被称为第一蛋,而另一个被称为第二蛋。驱动轴10的齿轮11的齿与三角形齿轮12的侧边12a啮合。这样,辊子8以相对较低的第一速度在运输方向(箭头p)向前移动。在一端(参见图3中的20),辊子设置有齿。通过这些齿,辊子8在齿条(未示出)上滚动,为此目的,齿条设置在安装板21的内侧上。结果,当辊子8在运输方向上移动时,辊子8绕其轴旋转。
36.从图5a的详细视图示出,来自凸轮件15的凸轮18稍微提升第一蛋,结果第一蛋的尖头与承载蛋的两个辊子8的倾斜部分8b接触。第一蛋的钝端不与辊子8接触。如上所解释的,由于辊子8在移动时连续地旋转,所以第一蛋的尖头向前指向,即在运输方向上指向。第二蛋由相应辊子8的两个窄部8a以第二蛋的纵轴平行于辊子8的轴的方式承载。因为这些辊子8也旋转,蛋在运输期间绕其纵向轴线转动。
37.图5b示出了在图5a中所示的情况之后不久的情况。在图5b中,第二蛋在其落入承载装置(未示出)的位置。驱动轴10的齿轮11的齿与三角形齿轮12的角12b啮合。这样,辊子8以相对较高的第二速度在运输方向(箭头p)上向前移动。通过这些齿,辊子8仍然在齿条(未示出)上滚动。由于辊子8在运输方向上移动的速度相对较高,辊子8也以增加的速度绕其轴
旋转。辊子8的向前运动的加速和它们的旋转的加速确保第一蛋从辊子输送机8落下,并且其尖头朝下。这可以从图5b的详细视图中清楚地看出。还可以看出,第二蛋由两个辊子8承载,并且将由凸轮18接合。
38.图5c示出了在图5b中示出的情况之后不久的情况。第一蛋从辊子输送机13落下,第二蛋刚刚被凸轮18接合。
39.图6a示出了来自图1的包装装置1的承载装置22的立体图。六个第一承载件27和六个第二承载件28一起形成六个蛋承载器的,布置成能够分别沿轴23和24以及25和26移动。在图6a中,六个第一承载件27以及六个第二承载件28以相互隔开的距离设置。承载件27、28的位置对应于辊子输送机3的辊子8的窄段8a的位置,并因此对应于蛋从辊子输送机3落下的位置。在图6a中,第一承载件27和相应的第二承载件28的每对彼此相对定向,使得顶部处的相互距离相对较大,并且底部处的承载件27、28靠近在一起,以便确保由第一承载件27和第二承载件28收集的蛋由承载件27、28承载。
40.承载装置22可整体地在高的第一位置和低的第二位置之间移动,其中高的第一位置对应于图6a,用于收集从辊子输送机3落下的蛋,低的第二位置用于将蛋放置在包装中。轴23和26布置成可分别相对于轴24和轴25移动,从而当轴23、24和25、26分别相互移动时,第一承载件27和第二承载件28分别倾斜。图6b和图6c示出了来自图6a的处于第二位置的承载装置22的一部分的立体图。与图6a相比,轴23和26在承载装置22的该位置分别相对于轴24和25倾斜。承载件27和28的底侧分别移动分开,使得位于第一承载件27和相应的第二承载件28之间的蛋可以在相应的承载件27、28之间通过并且可以放置在包装中。在图6c的侧视图中详细示出了承载件的状态。
41.与图6a中的情况相比,承载件27、28在轴23、24、25、26上朝向彼此移动。第一承载件27和第二承载件28朝向彼此移动。在这种布置中,承载件27、28的位置对应于蛋必须放置在包装中的位置。
42.图7a至图7c分别示出了来自图1的包装机的辊子输送机3和承载装置22之间的配合的立体图、俯视图和侧视图。图7a中的情况对应于在图5b和图6a中所示和参照图5b和图6a所描述的情况。第一蛋刚刚从辊子输送机落下。承载装置22位于辊子输送机3的相反侧下方,其中承载件27、28位于其底侧阻挡蛋通过的位置。因此,第一蛋从辊子输送机3落下,其中第一蛋的尖头指向下方,如上所述,并且通过位于辊子输送机下方的两个承载件27、28收集,其中第一蛋的尖头仍然面向下方。
43.在附图和说明书中,仅通过一个实施方式来示出和描述本发明。显然,在不脱离以下权利要求所限定的广泛保护的情况下,对本领域技术人员来说可以想到或可以不是显而易见的许多修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。