1.本发明涉及一种在建筑物建造期间使用的自爬式电梯装置。
背景技术:
2.尤其是高层建筑物的建造阶段需要电梯将施工人员和/或设备运送到建筑物的楼层。在已完工楼层工作的机械师和在待完工楼层工作的施工人员应该能够使用电梯。
3.在建筑物的建造阶段可以使用现有技术的跳跃式升降机。每当建筑物达到高于前一次跳跃的预定高度时,电梯的提升高度可以以一层或多层的步长增加。电梯机房可以分步向上运输。然而,在这种现有技术的布置中,竖井必须设置有特殊的接口。电梯机房沿竖井高度锚定在预先设置在竖井壁上的特殊锚定点上。
技术实现要素:
4.本发明的目的是提出一种在建筑物建造期间使用的新颖的自爬式电梯装置。
5.权利要求1中定义了在建筑物建造期间使用的自爬式电梯装置。
6.在高层建筑物中使用的现有技术跳跃式升降机概念复杂且昂贵。它们还需要机房甲板上方的大量空间。因此,电梯轿厢无法服务的楼层数量可能是4-5个。现有技术的跳跃式升降机概念还使用安装平台上方和偏转甲板(由建筑物施工人员提供)下方的中间平台(防撞甲板),以防止物体和材料落入竖井。
7.新颖的装置将使一些防撞甲板变得多余。安装平台的两个甲板之间不需要防撞甲板。偏转甲板的位置可以随着竖井的注浆进行而升高。
8.这种新颖的装置通过整合一些关键功能,将无法服务的楼层数量减少到最低限度。自爬式电梯装置在竖井的竖直方向上仅需要有限的空间。自爬式电梯装置因此可以在竖井和建筑物的建造的早期阶段安装到竖井中。自爬式电梯装置也可以在已建成的竖井顶部附近使用。支撑在自爬式电梯装置上的电梯可以运行到已建成的竖井顶部下方的两个层站的高度。
9.自爬式电梯装置可以在工厂场所预制并组装成可运输模块。然后可以使用传统的运输方法将生产的模块运输到施工现场。模块可以在竖井和建筑物建造的早期阶段被提升到坑中。当竖井达到需要电梯的高度时,可以开始使用模块。
10.当使用根据本发明的自爬式电梯装置时,在竖井壁中不需要特殊的接口。自爬式电梯装置可以在已经安装的导轨上爬升。自爬式电梯装置也可以仅通过导轨和/或通过与竖井中的导轨相关联的鱼尾板锁定在竖井中的适当位置。攀爬和/或悬挂过程中不需要在竖井上设置凹穴。本发明可以用于建筑物中的任何楼层到楼层的距离。
11.自爬式电梯装置可重复使用。当在第一现场不再需要自爬式电梯装置时,可以将自爬式电梯装置拆除并运输到另一个建造现场。
12.机房甲板可用作导轨箱的临时存放处。导轨箱可以随着电梯轿厢在竖井中被提升。导轨箱可以通过机房甲板中的舱口从轿厢提升到机房甲板。然后,导轨箱可以在它们被
提升到安装平台之前临时存储在机房甲板上,以便安装到竖井的壁上。
附图说明
13.下面将参照附图通过优选实施例更详细地描述本发明,其中:
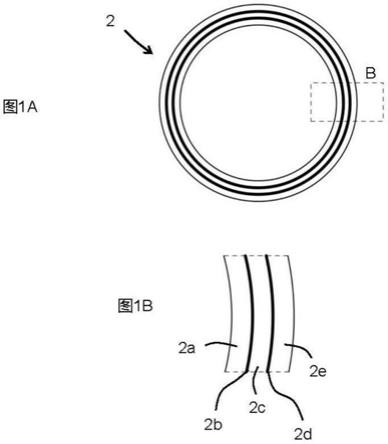
14.图1显示了自爬式电梯装置的一部分的横截面图,
15.图2显示了自爬式电梯装置的等距视图,
16.图3显示了图2的自爬式电梯装置的后视图,
17.图4显示了图2的自爬式电梯装置的侧视图,
18.图5显示了第一锁定器件的视图,
19.图6显示了第二锁定器件的视图,
20.图7显示了第二提升器件的侧视图,
21.图8显示了第三提升器件的第一侧视图,
22.图9显示了第三提升器件的第二侧视图,
23.图10显示了第三提升器件的第三侧视图,
24.图11显示了第四提升器件的侧视图,
25.图12显示了图11中所示提升器件的下部的放大图,
26.图13显示了图11中所示提升器件的上部的放大图。
具体实施方式
27.图1示出了自爬式电梯装置的一部分的横截面图。
28.该图显示了自爬式安装平台100,其形成了自爬式电梯装置的一部分。
29.自爬式安装平台100显示在竖井20中,导轨25通过支架26支撑在竖井20的壁21上。导轨25可以由导轨元件形成。两个连续的导轨元件的相对端可以与导轨固定器件连接。导轨固定器件可以由连接元件形成,例如鱼尾板27。导轨元件可以具有一定的长度,例如5米。导轨元件可以利用导轨固定器件(例如支架25)附接到竖井20中的壁21。在导轨元件的两端附近可以有支架25。该图仅显示了竖井20的底部。
30.自爬式安装平台100可以包括两个甲板110、120。两个甲板110、120可以在竖直方向s1上定位在彼此之上。
31.下甲板110可以设置有向上延伸的支撑器件140并且上甲板120可以设置有向下延伸的支撑器件150。向上延伸的支撑器件140牢固地附接到下甲板110并且向下延伸的支撑器件150牢固地附接到上甲板120。支撑器件140、150围绕导轨25延伸。支撑器件140、150可以设置有作用在导轨25上的引导器件160。沿着支撑器件140、150的高度,可以有多个引导器件160。沿支撑器件140、150的高度使用多个引导器件160将甲板110、120水平地稳定在在导轨25上。两个甲板110、120之间的竖直距离为最小l1,支撑器件140、150的外端彼此邻近,当两个甲板110、120之间的竖直距离为最大l2时,支撑器件的外端彼此分开。支撑器件140、150可以由具有u形横截面的梁形成。
32.引导器件160可以定位在支撑器件140、150内和/或支撑器件140、150之外。因此,每个甲板110、120都通过引导器件160支撑在竖井20中的导轨25上。引导器件160将每个甲板110、120支撑在导轨25上,使得仅沿导轨25在竖直方向s1上的移动是可能的。
33.引导器件160可以由滚轮装置形成,由此滚轮在导轨25的引导表面上滚动。滚轮装置可以对应于电梯轿厢中用于在导轨上引导电梯轿厢的滚轮装置。另一方面,引导器件160可以由滑动装置形成,由此滑动装置在导轨25的引导表面上滑动。滑动装置可以对应于电梯轿厢中用于在导轨上引导电梯轿厢的滑动装置。
34.提升器件130可以在两个甲板110、120之间延伸,以使两个甲板110、120沿着导轨25相对于彼此移动。提升器件130可以由液压致动器形成,例如上甲板120和下甲板110之间延伸的伸缩缸器件。两个甲板110、120因此通过液压致动器相对于彼此可移动地支撑。液压致动器仅在两个甲板110、120之间提供提升力。每个甲板110、120由引导器件160水平保持在适当位置。伸缩缸器件130可以包括两个伸缩缸130。液压促动器可以定位在自爬式电梯机房100的相对侧。
35.每个甲板110、120还可以在甲板110、120的相对竖直侧上设置有锁定器件170。锁定器件170可以连接到甲板110、120。锁定器件170可以作用在导轨25和/或在导轨固定器件26、27上。锁定器件170可以夹持导轨25和/或鱼尾板27和/或支架26。锁定器件170可以将甲板110、120锁定到竖井20中的导轨25。
36.自爬式安装平台100还可以包括动力源200。动力源200可以为提升器件130提供动力,例如布置成操作提升器件130的液压致动器。动力源200可以由液压动力单元形成。液压动力单元可以包括电动马达,该电动马达驱动从油箱泵送流体的液压泵。液压动力单元可以向液压致动器供应加压流体。可以使用来自施工现场的电力网络的电缆来向电动马达供电。另一种可能性是在自爬式安装平台100上布置电池。
37.自爬式安装平台100可包括两个液压动力单元200。第一液压动力单元可位于下甲板110上,第二液压动力单元可位于上甲板120上。第一液压动力单元和第二液压动力单元可以并联连接。两个液压动力单元中的每一个可以因此向提升器件130中的液压致动器提供加压流体。
38.自爬式安装平台100还可包括附接到每个甲板110、120的安全制动器。安全制动器可由连续启动的单向制动器形成。安全制动器允许甲板110、120向上运动,但防止甲板110、120向下运动。可以使用任何商业的单向安全制动器。
39.自爬式安装平台100可以通过用相应的锁定器件170交替地将下甲板110和上甲板120锁定和解锁到导轨25,然后用伸缩缸器件130升高解锁的甲板110、120,而沿着导轨25逐步爬升。
40.爬升过程可以从甲板110、120都被锁定器件170锁定到导轨25的情况开始。
41.爬升过程的第一步包括解锁上甲板120。第二步包括沿着导轨25在竖井中向上提升上甲板120。第三步包括当上甲板120到达下甲板110上方的期望目的地时锁定上甲板120。第四步包括解锁下甲板110。第五步包括沿着导轨25在竖井20中向上提升下甲板110。第六步包括当下甲板110到达上甲板120下方的期望目的地时锁定下甲板110。然后可以从第一步开始重复爬升过程。
42.在爬升过程中,甲板110、120之间的竖直距离可以在最小l1和最大l2之间变化。最大和最小之间的竖直距离定义了安装平台100的最大爬升步距。最大爬升步距可以达到竖井中两个连续楼层之间或几个连续楼层之间。最大爬升步距取决于提升器件130。
43.自爬式安装平台100在图中所示的情况下,两个甲板110、120之间的距离为最小
l1。上甲板120的上部位置用虚线表示,由此达到两个甲板110、120之间的最大距离l2。
44.可以从两个甲板110、120进行安装。安装平台100可以例如停在竖井20中,使得下甲板110处于层站处并且上甲板在层站上方。层站门可以从下甲板110安装并且导轨25可以从上甲板120安装。
45.图2显示了自爬式电梯装置的等距视图,图3显示了图2的自爬式电梯装置的后视图,图4显示了图2的自爬式电梯装置的侧视图。
46.自爬式电梯装置900包括自爬式安装平台100、位于安装平台100下方的机房甲板510和位于机房甲板310下方的电梯轿厢10。自爬式安装平台100、机房甲板510和电梯轿厢10均分别可移动地支撑在位于竖井的相对侧壁上的轿厢导轨25上。附图还显示了定位在竖井的侧壁上的配重导轨25a。图中未显示配重。
47.安装平台100包括竖直s1定位在彼此上方的两个甲板110、120。提升器件130、引导器件160和锁定器件170可以以与图1相同的方式定位在甲板110、120上。安全制动器可以进一步附接到每个甲板110、120。安全制动器可以由连续激活的单向制动器组成。安全制动器允许甲板110、120向上运动,但防止甲板110、120向下运动。可以使用任何商业的单向安全制动器。
48.自爬式安装平台100还可包括稳定器件310,用于将自爬式安装平台100支撑在已安装的导轨25上。稳定器件310可夹持配重导轨25a以支撑自爬式安装平台100在配重导轨上。
49.自爬式安装平台100可以设置有导轨箱410和支架箱450。导轨元件和支架因此可以存储在安装平台100上以用于特定需要。当在竖井中进行导轨的安装时,可以重新填充导轨箱410和支架箱450。当要安装新的一段导轨元件时,安装平台100可以停在已安装的导轨元件的最上段。
50.稳定器件310也可用于从导轨箱410中拾取导轨25并将它们定位在竖井中的壁上,以便将导轨附接到竖井中的壁上。
51.机房甲板510位于安装平台100下方。机房甲板510可包括电梯机械30和电梯所需的其他设备。电梯机械30可以包括驱动器、马达、牵引绳轮、机械制动器和提升绳索。电缆卷筒31和提升绳索卷筒32可以进一步定位在机房甲板510上。当机房甲板510在竖井中逐步向上爬升时,需要电缆卷筒31和提升绳索卷筒32以提供轿厢电缆和提升绳索的加长。机房甲板510可以通过引导器件160可移动地支撑在导轨25上。机房甲板510还可以设置有锁定器件170,以便将机房甲板510锁定和解锁到导轨25和/或导轨固定器件26、27。机房甲板510也可以设置有导轨箱420。机房甲板510可以用作导轨元件的中间存储器。
52.机房甲板510可以从安装平台100悬挂。机房甲板510从安装平台100的悬挂可以布置成使得机房甲板510锁定到导轨25和/或导轨固定器件26、27,允许安装平台100在竖井中逐步向上自由爬升。导轨元件可以在安装平台的逐步爬升过程中安装。安装平台100然后可以在机房甲板510上方的某个给定高度被锁定到导轨25和/或导轨固定器件26、27。然后可以例如使用位于安装平台100上的绳索升降机将机房甲板510向上提升到安装平台100附近的位置。然后将机房甲板510锁定到导轨25和/或导轨固定器件26、27。轿厢电缆和提升绳索可以被延长,从而可以从机房甲板510的这个新的更高位置操作轿厢10。
53.如图1所示,液压动力单元200可以分为两个液压动力单元。第一液压动力单元可
以定位在下甲板110上,第二液压动力单元可以定位在上甲板120上。第一液压动力单元和第二液压动力单元可以并联连接。两个液压动力单元中的每一个可以因此向提升器件130提供加压流体,提升器件130可以由两个伸缩缸形成。
54.电梯轿厢10可通过从电梯轿厢10向上传递到定位在机房甲板510上的牵引绳轮并进一步向下传递到配重的提升绳索悬挂。图中未示出在配重导轨25a上运行的配重。电梯轿厢10还可以设置有导轨箱430。电梯轿厢10因此可以用于在竖井中运输导轨25。电梯轿厢10可以设置有在顶板中的开口或设置有可打开的顶板以容纳导轨箱。电梯轿厢10可以通过引导器件160可移动地支撑在导轨25上。电梯轿厢10可以设置有安全制动器,例如可以使用机电操作的安全制动器。
55.自爬式安装平台100可以在将电梯安装在竖井中的过程中使用。安装可以从甲板110、120手动和/或自动完成。机械师和/或机器人可以在甲板110、120上工作。电梯的安装可以包括导轨的安装以及层站门和竖井中需要的所有其它设备的安装。
56.自爬式电梯装置900的操作可以如下。在竖井中安装导轨和/或层站门和/或电梯所需的其他设备期间,安装平台100可用于在竖井中逐步向上爬升。当安装平台100向上爬升时,机房甲板510在安装平台100下方的位置锁定到导轨25和/或导轨固定器件26、27。轿厢10可用于将人员和/或材料提升到竖井中定位的机房甲板510下方的高度。当安装平台100并因此安装已达到高于机房甲板510的预定高度时,安装平台100可锁定到导轨25和/或导轨固定器件26、27。机房甲板510然后可以被解锁并向上提升,例如使用定位在安装平台100上的绳索提升机。在提升机房甲板510期间,轿厢10可以锁定到导轨25和/或导轨固定器件26、27。轿厢电缆和提升绳索可以在机房甲板510的提升过程中延伸。机房甲板510可以在其被提升到安装平台100附近的位置之后再次锁定到导轨25和/或导轨固定器件26、27。现在可以从机房甲板510的该第二较高位置操作轿厢10。
57.安装平台100上用于提升安装平台100的提升器件130的容量可以被确定为在竖井中一次仅向上逐步提升一个甲板110、120。提升器件的能力,例如安装平台100上用于提升机房甲板510的绳索提升机,可以设计为仅在竖井中向上提升机房甲板510。安装平台100可以在竖井中以小步距向上提升。另一方面,机房甲板510可以在竖井中向上远跳提升。
58.机房甲板510可以包括导轨箱420。因此,机房甲板510可以用作导轨的中间存储器。导轨元件可随着轿厢10向上提升至机房甲板510。导轨元件可被提升通过轿厢10的顶板中的开口并进一步向上通过机房甲板510中的开口,到达机房甲板510。导轨元件然后可以从机房甲板510向上提升通过安装平台100中的开口,到达安装平台100。
59.机房甲板510可以通过锁定器件170锁定到导轨25和/或导轨固定器件26、27。锁定器件170可以由制动器件180或锚定器件190形成。作为替代或作为进一步的选择,机房甲板510也可以锁定到设置在竖井20中的接口。接口可以由竖井中的凹穴或支撑部分形成。因此,机房甲板510可以设置有从机房甲板510向外突出的锁定杆。锁定杆将突出到凹穴中或突出到支撑部分上,由此可以支撑机房甲板510并且由此也可以支撑轿厢10在竖井上而不是支撑在导轨25上。机房甲板510锁定到竖井上可以用于例如在经由机房甲板510支撑到导轨25的总重量成为问题的情况下。例如当机房甲板510上的导轨箱420已满时,重量可能成为问题。
60.图5显示了第一锁定器件的视图。
61.第一锁定器件170由制动器件180形成。制动器件180可以包括具有用于导轨25的狭缝的框架181和位于导轨25的相对两侧上的两个楔形制动靴182。制动靴182可以通过框架181上的滚轮183从楔形表面可移动地支撑。弹簧184可以定位在制动靴182的第一端和框架181之间。制动靴182的第二相对端可以支撑在作用在气缸186中的滑块185上。
62.液压动力单元210可以为制动器件180提供动力。液压单元210可以包括电动马达211、液压泵212和储油器250。液压泵212将油从储油器250泵送到气缸186中,以移动气缸186中的滑块185。
63.向气缸186中的柱塞185供应加压流体将抵抗弹簧184的力在图中向下压制动靴182。制动靴182因此从导轨25的引导表面移开。甲板110、120因此可以在导轨25上自由移动。
64.由于弹簧184作用在制动靴182的第二端上的力,从气缸186抽取加压流体将允许制动靴182在图中向上移动。制动靴182因此移动成与导轨25的引导表面接触。因此,甲板110、120将锁定到导轨25。
65.液压单元210可以仅用于制动器件180。另一种可能性是在安装平台100上为安装平台100上所有需要液压动力的设备设置公共主液压单元。液压阀可以用于连接不同的设备到公共主液压动力单元。
66.作为替代,制动器件180可以机电操作。可以使用机电装置来克服弹簧184的力按压制动靴182。机电装置的停用将启动制动靴182抵靠导轨25。
67.图6显示了第二锁定器件的视图。
68.第二锁定器件170由锚定器件190形成。锚定器件190可以包括支撑在甲板110、120上的框架191和定位在导轨25的相对两侧上的两个爪192。爪192可以经由第一铰接接头j1支撑在框架191上。致动器可以附接到位于第一铰接接头j1的相对侧的爪192(图中未示出)。致动器可以使爪192围绕第一铰接接头j1在爪192位于鱼尾板27的上支撑表面27a上的锁定位置和爪沿顺时针方向旋转从而脱离与鱼尾板27的接触的解锁位置之间旋转。
69.致动器可以由液压缸或机电装置形成。爪192可以由电动马达或一个或多个机电装置操作。
70.甲板110、120在锚定器件190的锁定位置被支撑在鱼尾板27上。鱼尾板27上的支撑消除了甲板110、120的向下运动。甲板110、120可以在锚定器件190的解锁位置在导轨25上自由移动。
71.鱼尾板27通常定位在两个连续导轨元件之间的接合处。附加的鱼尾板27可以沿着导轨元件的长度定位。导轨元件可以设置有中间鱼尾板27,中间鱼尾板27在安装导轨元件之前就已经附接到导轨元件。鱼尾板27可以例如位于5m长导轨元件的中间。中间鱼尾板27可以在安装后永久留在导轨上。另一种可能性是在安装向上进行时移除中间鱼尾板。
72.鱼尾板27可以比导轨25宽,使得鱼尾板27的上表面在导轨25的每一侧形成用于爪192的上支撑表面27a。鱼尾板27的结构因此可以适于用作锚定器件190中爪192的支撑点。
73.鱼尾板27是可用于连接连续导轨元件的端部的连接元件的示例。
74.可以使用类似的锚定器件190将甲板110、120锁定到支架26,从而将导轨25附接到竖井20中的壁21。然后爪192可以与支架26相互作用。
75.图7显示了第二提升器件的侧视图。
76.第二提升器件可以形成为铰接式千斤顶600。两个支撑臂610、620的中间部分可以经由铰接接头j31连接。每个支撑臂610、620的上端可以经由上甲板120上的铰接接头j21、j22支撑。每个支撑臂610、620的下端可以经由下甲板110上的铰接接头j11、j12支撑。下甲板110上的各铰接接头j11、j12和上甲板120上的各铰接接头j21、j22应布置成允许支撑臂610、620的端部在水平方向上的运动,但会阻止竖直方向的运动。
77.致动器630可以设置在下甲板110上。致动器可以连接到沿着下甲板110在水平方向上穿过的杆640。杆640可以形成为蜗杆。
78.第一支撑臂610的下端可以经由轴640附接到致动器630。第一支撑臂610的下端可以设置有与蜗杆丝杠640配合的铰接接头。蜗杆丝杠640可以经由接头部分附接到支撑臂610、620的下端部。蜗杆丝杠640的外端可以支撑在下甲板110上。
79.致动器630沿第一方向的旋转将使支撑臂610、620的下端朝向彼此移动,由此下甲板110和上甲板120沿彼此远离的方向移动。致动器630在第二相反方向上的旋转将使支撑臂610、620的下端彼此远离,由此下甲板110和上甲板120在朝向彼此的方向上移动。下甲板110和上甲板120因此可以通过致动器630交替地向上提升。
80.下甲板110可以锁定到导轨,由此可以通过沿第一方向旋转致动器630来提升解锁的上甲板120。此后,上甲板120可以锁定到导轨,由此可以通过沿第二方向旋转致动器630来提升下甲板110。
81.致动器630可以由马达形成,例如旋转蜗杆丝杠640的电动马达。可以使用一对铰接式千斤顶600,即一个铰接式千斤顶600可以定位在甲板110、120的每个侧边缘处。
82.作为替代,铰接式千斤顶600可以由液压缸-活塞设备操作。气缸-活塞设备可以在下甲板110和任一支撑臂610、620的上部之间延伸。铰接式千斤顶600还可以包括彼此堆叠的几层横向延伸的支撑臂。
83.图8示出了第三提升器件的第一侧视图,图9示出了第三提升器件的第二侧视图,图10示出了第三提升器件的第三侧视图。
84.第三提升器件700可以用绳索和滑轮实现。两个平行的支撑结构710、720可以在下甲板110和上甲板120之间延伸。两个支撑结构710、720可以彼此相隔一定水平距离定位。每个支撑结构710、720可以包括内支撑杆711、721和外支撑杆712、722。内支撑杆711、721定位在外支撑杆712、722的内部。内支撑杆711、721可以通过形状锁定来锁定到外支撑杆712、722,使得内支撑杆711、721可以相对于外支撑杆712、722在纵向方向上移动。外支撑杆的下端712、722可以附接到下甲板110,并且内支撑杆711、721的上端可以附接到上甲板120。
85.第一轴731可在内支撑杆711、721的下端部之间沿水平方向延伸。第一轴731的每一端可附接到相应的内支撑杆711、721的下端。第二轴732可在外支撑杆712、722的下端部之间沿水平方向延伸。第二轴732的每一端可附接到相应的外支撑杆712、722的下端。第一轴731和第二轴732可位于两个支撑结构710、720的相对侧。第三轴733可在外支撑杆712、722的上端部之间延伸。第三轴733的每一端可附接至相应的外部支撑杆712、722的上端。
86.第一滑轮741可以定位在两个支撑结构710、720之间。第一滑轮741可以可旋转地支撑在第三轴733上。因此第一滑轮741相对于外支撑杆712、722是静止的。第二滑轮742可以定位在两个支撑结构710、720之间。第二滑轮742可以可旋转地支撑在第二轴732上。因此第二滑轮742相对于外支撑杆712、722是静止的。
87.绳索750的第一端可以在第一固定点p1处固定到第一轴731。绳索750可以从第一固定点p1向上绕过第一滑轮741。然后绳索750可以向下绕过第二滑轮742。绳索750然后可以围绕第二滑轮742转向并且向上绕过支撑在下甲板110上的提升器件760。绳索750的第二端可以是自由的。
88.提升设备760可以是人骑式提升机。提升设备760可以包括定位在绳索750相对侧上的牵引辊。牵引辊可以由一个或多个马达驱动,例如电动马达。牵引辊沿第一方向的旋转将向上拉动绳索750通过提升设备760。牵引辊沿第二相反方向的旋转将使绳索710沿第二相反方向向下移动通过提升设备760。因此,牵引辊将控制绳索750通过提升设备760的运动。
89.甲板110、120被示出处于下甲板110和上甲板120之间的竖直距离最小的位置。
90.下甲板110可以首先被锁定到导轨,由此上甲板120被解锁。提升设备730现在可以开始将绳索710沿第一方向向上拉动通过提升设备760。绳索750的第一端附接到第一轴731,第一轴731附接到内支撑杆711、721的下端。内支撑杆711、721将因此开始向上移动,由此上甲板120也开始相对于静止的下甲板110向上移动。当第一轴731位于第一滑轮741下方一段距离时,下甲板110和上甲板120之间的竖直距离最大。第一轴731可升高至低于第一滑轮741外圆周的位置。内支撑杆711、721和外支撑杆712、722之间也应该在甲板110、120之间的距离最大的位置重叠。
91.然后可以将上甲板120锁定到导轨,从而解锁下甲板110。提升设备现在可以开始将绳索750以第二相反方向向下拉动通过提升设备760。下甲板110将开始向上移动,由此外支撑杆712、722沿着内支撑杆711、721向上移动。下甲板110向上移动直到第一支撑点p1再次处于下甲板110附近的位置。因此我们最终处于图中所示的情况,其中甲板110、120之间的竖直距离最小。
92.轴731、732、733可以是静止的并且滑轮741、742可以可旋转地附接到轴732、733。
93.图11示出了第四提升器件的侧视图,图12示出了图11所示的提升器件的下部的放大图,图13示出了图11所示的提升器件的上部的放大图。
94.提升器件800在图11的左侧以展开状态示出,而在图11的右侧以收缩状态示出。
95.提升器件800由支撑结构805形成,支撑结构805包括相互可移动地支撑的三个支撑杆810、820、830。第三支撑杆830可以以第一形状锁定支撑在第二支撑杆820内。第二支撑杆820可以以第二形状锁定支撑在第一支撑杆810内。第三支撑杆830可以沿纵向方向相对于第二支撑杆820移动。第二支撑杆820可以相对于第一支撑杆810沿纵向方向移动。支撑杆810、820、830的形状锁定在图13中示出。
96.支撑杆810、820、830相对于彼此的移动是通过齿形带或链851、852和齿形轮841a、841b、842a、842b、843a、843b、844a、844b、845a、845b来完成的。齿形带或链851、852可以由致动器860驱动。致动器860可以是马达,例如电动马达。
97.第一齿形带或链851可以定位在支撑结构805的第一侧上,并且第二齿形带或链852可以定位在支撑结构805的第二相对侧上。
98.第一齿形带或链851可以在支撑结构805的第一侧上以闭环形式绕过齿形轮841a、842a、843a、844a和845a。第二齿形带或链852可以在支撑结构805的第二侧上以闭环形式绕过齿形轮841b、842b、843b、844b和845b。在支撑结构805的相对侧上的齿形轮可以成对布
置。每对齿形轮中的齿形轮彼此相对定位,使得齿形轮的轴的中心轴线重合。每个齿形轮可以可旋转地支撑在轴上,由此轴是静止的并且附接到支撑结构805。另一种可能性是每个齿形轮固定到轴并且轴可旋转地附接到支撑结构805。
99.支撑结构805的第一侧上的第一齿形轮841a和支撑结构805的第二相对侧上的第一齿形轮841b可以通过第一轴831彼此连接。第一轴831还可以连接到致动器860。致动器860可以是马达,例如电动马达。马达860可以同步驱动两个齿形带或链851、852。第一轴831可以穿过第一支撑杆810的下端部811。第一轴831可以可旋转地支撑在第一支撑杆810的下端部811上。第一支撑杆的所述下端部811支撑杆810可附接至下甲板110。第三支撑杆830的上端可附接至上甲板120。
100.第一对齿形轮841a、841b因此相对于第一支撑杆810是静止的。第二对齿形轮842a、842b被支撑在第二支撑杆820的上端。第三对齿形轮843a、843b被支撑在第二支撑杆820的下端。第四对齿形轮844a、844b被支撑在第一支撑杆810的上端。第五对齿形轮845a、845b被支撑在第一支撑杆810的下端811上。因此,第五对齿形轮845a、845b是静止的。第三支撑杆830的下端进一步通过第二轴832附接到齿形带或链851、852。
101.当电机860沿第一顺时针方向旋转时,第二支撑杆820和第三支撑杆830将向上移动,如图11中左侧所示。
102.当马达860沿第二逆时针方向旋转时,第二支撑杆820和第三支撑杆830将向下移动并返回到图11中右侧所示的位置。
103.该第三提升器件800可以被修改,使得可以使用定位成彼此相距一定距离的两个平行的支撑结构805,例如定位在甲板110、120的相对边缘处。每个支撑结构805可以包括三个支撑杆810、820、830。两个支撑结构805可以通过轴或型材彼此连接。相应的齿形轮841a、842a、843a、844a、845a可以设置在轴或型材的中间部分上。然后可以用一个齿形带或链来实现驱动。
104.作为另一种选择,提升器件130可以用由致动器操作的螺旋机构来实现。致动器可以是马达,例如电动马达。齿轮齿条、小齿轮和蜗杆丝杠可用于螺旋机构。
105.附图示出了制动器件180形式的第一锁定器件170和锚定器件190形式的第二锁定器件170。制动器件180和/或锚定器件190可以用作安装平台100的甲板110、120和/或机房甲板510和/或电梯轿厢10中的锁定器件。
106.在本发明的每个实施例中,甲板110、120可以包括用于将甲板110、120可移动地支撑在导轨25上的引导器件160和用于将甲板110、120锁定和解锁到导轨25和/或导轨固定器件26、27的锁定器件170。
107.至少一个动力源200可以由包括电动马达、液压泵和油箱的液压动力单元形成。另一方面,至少一个动力源200可以由一个或多个马达形成,该马达通过旋转轴提供动力,例如液压马达或电动马达。一个或多个马达可以向提升设备130提供动力。
108.本发明的使用不限于任何特定的电梯类型。本发明可用于任何类型的电梯,例如没有机房和/或配重的电梯。配重可以位于竖井的后壁上或竖井的任一侧壁上或竖井的两个侧壁上。
109.对于本领域技术人员来说显而易见的是,随着技术的进步,可以以各种方式实现本发明的概念。本发明及其实施例不限于上述示例,而是可以在权利要求的范围内变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。