1.本发明涉及一种用于在地面以上或以下使用的纤维光缆连接器。
背景技术:
2.在纤维光缆的铺设中使用这样的连接器。使用线缆例如用于提供从接线盒到诸如办公室或住宅的建筑物的纤维光缆连接,以便提供用于因特网数据的连接。
3.以成束的单独纤维的方式来提供纤维光缆,所述成束的单独纤维可长达几公里。纤维束/线缆被装填通过管(经常称为导管/微导管/管道),所述管典型地为50米长,但也可长达2000米。因此,多个管可能需要被连接在一起,以便支撑完整长度的纤维束。
4.由于它们的使用方式,存在对纤维光缆连接器的独特的成组要求。
5.其外径必须尽可能小,以便使体积最大限度地减小,因为连接器经常大量地聚集在一起。
6.在使用中,延伸穿过连接器中部的线缆束必须可见。这是因为对于操作者来说,能够目视确认纤维束是否延伸穿过特定的连接器是必要的。管将被铺设,而纤维可能要很久以后才能通过。因此,操作者需要能够确定哪些管路还不具有处于适当位置的纤维。此外,在纤维故障的情况下,操作者可通过目视检查来确定在特定的连接器处纤维是否处于适当位置。
7.连接器还需要高度抗冲击。线缆通常被掩埋在地下,而为了维护,它们需要被挖出来。这通常由工人用锹来完成,并且工人知道线缆是否存在的首次时机是在线缆被锹撞击时。因此,连接器需要足够稳健以抵抗这样的冲击。在实践中,他们需要通过“15j冲击试验”。
8.这后两个要求(即,需要能够观察纤维且需要高的抗冲击性)相当于矛盾的要求。
9.对于大多数应用来说,连接器由不透明塑料制成,并且容易获得处于抗冲击形式的这些连接器。然而,非不透明材料典型地是非晶体材料,并且本质上比不透明的等同物更脆。
10.因此,现有技术的纤维光缆连接器使用多个周向肋,以便加强连接器。然而,这导致了进一步的问题。对于连接器来说,肋产生了不连续的轮廓,导致影响透明度的高度辐射状区域。此外,污垢和石头被捕集在肋之间。石头的存在可导致冲击被直接传递到肋,从而造成损坏。此外,随着时间的推移,污垢可能被压实,并且因此在试图目视检查纤维时难以清除。
技术实现要素:
11.本发明解决了这些问题。
12.根据本发明的第一方面,我们已经提供了根据权利要求1所述的光学纤维连接器。
13.因此,本发明采取了与现有技术完全不同的冲击保护方法。本发明的冲击保护由与外套筒间隔开以限定间隙的内套筒提供,而不是提供多个外部肋。
14.现在,可能导致本体变形的任何对本体的冲击都将倾向于导致外套筒向内变形。然而,由于间隙的存在,在内套筒被压缩之前,不直接与材料的腹板对齐的任何冲击可导致间隙宽度两倍的向内变形。
15.由于冲击与腹板对齐的机会相对小,腹板可被布置成在直径上彼此相反。然而,优选地,该腹板或每个腹板被布置成使得在径向冲击与腹板直接对齐时,外套筒可在内套筒上发生任何变形之前以间隙的宽度变形。
16.由于这种影响,希望使该/每个腹板尽可能小。在实践中,这受限于模制过程的要求,因为形成内套筒的塑料需要流过腹板区域。
17.虽然最佳性能由单个腹板来满足,但是由模制过程施加的限制可能意味着在实践中需要多于一个的腹板。如果使用多于一个的腹板,则每个腹板优选地与其它腹板成角度地偏移,使得不在直径上相反的位置处支撑内套筒的部分。如果发生了这种情况,则在该方向上的任何冲击都将直接被传递到内套筒。
18.腹板中的一个需要被制造得足够稳健,使得它会保持将内套筒支撑在外套筒内。然而,为了模制的目的,可提供额外的腹板。当提供多个腹板时,这些腹板可被制造得较薄,使得它们有效地成为牺牲腹板。在冲击的情况下,通过外套筒的壁传递的任何变形都可导致最近的腹板失效,留下其它腹板来保持内套筒的最佳位置。在使用中失去一个这样的牺牲腹板不是问题,因为剩余腹板会将内套筒保持在适当位置。因为内套筒由先前组装的管支撑,所以由于冲击导致的多于一个腹板的损失将不是问题。
19.腹板优选地在非径向方向上延伸,例如相对于内套筒在切向上延伸,以便减小被传递到内套筒的力的分量。
20.腹板优选地在相同的径向平面内。它们优选地偏离连接器的中心,以便不损害该区域的可见性。
21.如将从以上的描述理解的那样,腹板应该占据内套筒的外表面的相对小的区域。
22.优选地,所有腹板的总周边长度小于内套筒的外壁的周长的50%、优选地小于20%、更优选地小于10%并且最优选地小于5%。通过占据小于内套筒的外壁的周长的50%,一个或多个腹板可被布置成使得在内套筒的相对侧上、在直径上相反的位置处没有通过腹板的两个部分的直径负载路径。
23.优选地,腹板占据内套筒的外壁的轴向长度小于30%、更优选地小于25%并且最优选地小于20%。优选地,腹板占据内套筒的外壁的面积小于10%、更优选地小于5%并且最优选地小于3%。所有这些测量值都代表腹板在其最宽点处的尺寸。
24.由于本发明所采取的冲击保护的不同方法,对现有技术的肋的需要可显著降低。优选地,本发明完全消除了对肋的需要,使得优选地,连接器本体的外面没有肋。这消除了在连接器的外表面处的任何应力集中,也消除了任何潜在的污垢捕集点。
25.优选地,连接器本体的至少轴向中心三分之一具有连续圆柱形外表面,该连续圆柱形外表面具有恒定的半径。该中心部分对应于纤维将暴露在连接器中的区域。更优选地,要求具有恒定半径的连续圆柱形外表面沿着连接器本体的基本上全部长度延伸。然而,连接器本体的端部可具有倒圆轮廓。
26.这样的布置不仅消除了应力集中和污垢捕集点,还改善了连接器的透光性。与现有技术的肋相比,连续的圆柱形表面更容易看穿,在现有技术中,即使在清洁之后,仍可能
留下残留量的污垢。此外,肋的使用引起光的内部反射,这妨害了在连接器的中心处的区域的直接可见性。这不会发生在圆柱形外表面上。不仅圆柱形外表面容易擦拭干净,而且还可将模具在中心区域中抛光,从而提供进一步的可见性改善。
27.这提供了本发明的第二方面,其被限定为根据权利要求15所述的纤维光缆连接器。
28.优选地,非不透明本体被构造成使得当管被连接于适当位置时,通孔的部分在使用中从连接器本体外部可见。
29.这可通过连接器的接纳o形环以与插入到该连接器的相应端部中的相应管密封的每个端部来实现,该o形环与连接器的中心透明部分间隔开。
30.相应连接器可被接纳在连接器本体的外部上,但优选地被接纳在连接器本体的每个端部内。这提供了低轮廓装置,并且保护连接器免受污垢影响且免受损坏。
31.环形凸缘优选地突出到通孔中,以提供用于管的端部止动件。在这种情况下,优选地在使用中穿过凸缘可见到通孔。
附图说明
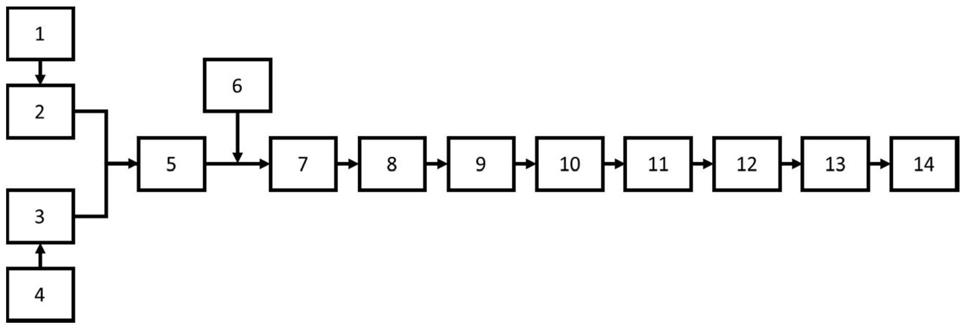
32.现在将参照附图描述根据本发明的纤维光缆连接器的示例,在所述附图中:图1a至图1c是连接器的剖视透视图,示出了管的逐步插入;图2a是连接器本体的在垂直于连接器本体的主通路的平面中、穿过图2b中的线a-a的截面图;图2b是连接器本体的在穿过本体的主轴线的平面中、穿过图2a中的线b-b的截面图;图2c是在与图2a相同的平面中示出了连接器的第二示例的视图;图2d是在与图2b相同的平面中示出了第二示例的视图;图3是连接器在图2b的平面中的截面,其中,管被连接并且有纤维束穿过;图3a更详细地示出了图3的中心部分;图3b示出类似于图3a的视图,其具有不同的管路构造并且没有纤维穿过;图4a和图4b对应于图3a和图3b,示出了现有技术的布置;图5是从连接器本体的一个端部看的连接器的分解透视图;图6a是图5的处于非分解形式的等同物,示出了处于第一成角度构造的卡座和套爪;图6b是穿过图6a中的穿过锁定凸块的平面的截面;图7a和图7b是对应于图6a和图6b的视图,分别示出了处于第二成角度构造的卡座和套爪;并且图8a和图8b对应于图7a和图7b,但示出了处于原位的管。
具体实施方式
33.连接器包括连接器本体1,该连接器本体1具有以主轴线x为中心的大体上中空的圆柱形构造。连接器2(在下面更详细地描述)设置在每一端部处,以在每一端部处接纳和抓持由o形环3密封的管t。
34.本体1由非不透明塑料模制。塑料必须足够透光,使得连接器的外部目视检查允许操作者确定在连接器的中心处是否存在有纤维光缆或纤维束f。理想的是,本体应该尽可能接近透明。然而,实际考量意味着本体将不会完全透明。相反,本体可能半透明到纤维足以可见的程度。合适的材料是聚碳酸酯、聚苯乙烯、聚酯、丙烯酸纤维和尼龙。本体1在模制过程中形成,并且可选地可被抛光以改善本体的透光性。如从多个图中可看到的那样,本体的外轮廓是光滑的构造,它没有外部肋,从而消除了任何的应力集中和污垢积聚的孔口。
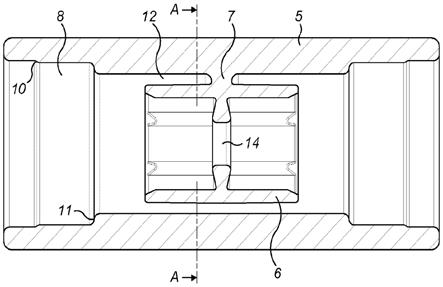
35.本体1由外套筒5和内套筒6构成,所述外套筒5和内套筒6通过至少一个如以下所描述那样的腹板7连接。
36.外套筒5具有轴向孔8,该轴向孔8在远侧端部处开放,并且具有接纳连接器2的第一台阶10和第二台阶11,如以下所描述的那样。
37.内套筒6由腹板7固持,以便形成具有大体上的均匀厚度的间隙12,如在图2a中所最好地看到的那样。
38.如将从图2a和图2b理解到的那样,腹板7仅延伸跨过内套筒6的很小一部分,使得间隙12存在于内套筒6的大部分长度和周边。
39.在管路的安装期间或为了维护而将管路挖出时发生在外套筒5上的任何冲击都可导致外套筒5的变形。
40.通过提供间隙12,外套筒5上的任何外部冲击的影响在显著程度上与内套筒6隔离,并因此在很大程度上防止了引起内套筒6的内孔14的直径的任何变化。初步试验表明,这种设计在抵抗外部冲击上是有效的。此外,这能够以不需要增加肋且不需要增加连接器的外径的方式来实现。
41.使用非常小尺寸的腹板7意味着冲击经由腹板7从外套筒5直接传递到内套筒6的机会大大减少。即使发生这种情况(即,在图2a中的竖直向下方向上在图2b中的中心点连接器处施加冲击),在内套筒上产生任何应力(该应力将对内套筒6的内孔14产生不利影响)之前,内套筒6仍可偏转等同于间隙12的宽度的量。
42.为了模制本体1,内套筒6所需要的所有塑料都需要穿过腹板7、15。这代表流入相对复杂且狭窄的流动路径的相当显著的量的塑料。为了缓解这种情况,我们设想提供在图2a中示意性地描绘的一个或多个增加的腹板13,这些腹板相对于腹板7成角度地偏移,并且也可在轴向上偏移,以确保不存在以下的点:在所述点处,在直径上相反的侧部上支撑内套筒6。增加的腹板13在模制过程期间为塑料进入内套筒提供进一步的流动路径。可使多个腹板比单个腹板更弱,使得最接近冲击的腹板在所施加的负载下优先断裂,留下其余的肋来支撑内套筒6。
43.与如在图2a中所示出的那样在径向意义上延伸相反,该腹板15或每个腹板15可如在图2c中所示出的那样在切向上延伸,或在跨过间隙12的任何其它方向上延伸。如在图2d中所示出的那样,腹板15相对于环形凸缘20在轴向上偏移,使得它们不会损害该区域的可见性。
44.现在将参照图3、图3a和图3b来描述连接器被构造成避免钩挂纤维f的方式,其中图4a和图4b用来提供与现有技术的比较。
45.图3示出了连接器本体1,其具有在每一端部固定并密封的管t。一旦以这种方式连接,纤维f就被从一个端部吹动穿过管t,跨过管之间的接合部,并且进入相邻的管。
46.管t在内套筒6的中点处抵靠环形凸缘20。连接器2和o形环3大体上具有与内套筒6的内径相同的内径,使得在管t被推动到本体1中时,它会被引导到内套筒6中。然后,管t的端部抵接环形凸缘20。如在图3a和3b中最好地看到的那样,环形凸缘20设有底切部分21,使得环形凸缘20在轴向方向上的厚度朝向轴线x增加。
47.因此,管t的最内拐角22是管t的抵接环形凸缘20的第一部分。这意味着在管t的内面23和环形凸缘20之间没有间隙。
48.如在图3a和3b中所示出的那样,底切部分21被倒圆。类似地,环形凸缘的径向最内拐角24被倒圆以向纤维呈现光滑表面。
49.与在图4a中示出的现有技术布置相比,消除管t的端部和环形凸缘20之间的间隙g意味着管t不存在使纤维f钩挂在上面的暴露的突兀边缘。
50.图3b描绘了左侧管被以与垂直于轴线x的平面稍微倾斜的角度切割的情况。因此,管t的最上边缘25进入底切区域21并座置在环形凸缘20上。
51.通过与图4b的比较,可看出的是,在图的上半部分中消除了管t和环形凸缘20之间的间隙,并且与图4b相比,在底部处的间隙显著减小。
52.如将从图3a和图3b显而易见的那样,环形凸缘20的径向向内的范围大于管t的内径。因此,环形凸缘20稍微向内突出超过管t的内面23。从图3b和图4b的比较来看,如果假定纤维f从右向左装填,纤维的末端在连接器1的附近沿着图3a和图4b中的内面23的下部行进,则在图3b中,该末端将首先遇到环形凸缘20的略微伸出超过管t的内表面23的拐角。然而,纤维f可容易地越过这个弯曲的拐角,并且在这样做时,这种偏转应该将纤维的末端推动到管t的暴露边缘28之上。相比之下,在图4b中,环形伸出部s不突出超过管的内表面23,因此没有东西开始使纤维f朝向孔的中心偏转返回。此外,图4b中的间隙g'显著大于图3b中的对应间隙。这样,不仅纤维不会偏转远离该间隙,大间隙的存在为纤维进入间隙并钩挂在管t的边缘28上提供了显著更大的机会。
53.防止管的钩挂的进一步的特征是所列出的设有花键的布置,如在图1和图2中最好地示出的那样。
54.如可从这些图中看出的那样,六个在轴向上延伸的花键30围绕内套筒6的周边相等地间隔开。这些在垂直于轴线的平面中被示出为具有恒定的截面。然而,它们可具有朝向环形凸缘20增加的厚度。
55.如在图1a和图1b中所示出的那样,来自盘管的管t已被装填,并且已呈现扁平的椭圆形形状。当管t进入内套筒6时,管t以管t的扩大部分接合,并且倾向于将管t推回到如在图1c中所示出的那样的更圆的形状。
56.可使用任意数目的花键。然而,六被认为是合理的数目。这允许与以任何取向插入的扁平管接合。较少数目的凸缘具有管的扩大部分可能进入相邻花键之间的风险。另一方面,增加更多的花键增加了管t进入连接器1的插入阻力。
57.花键30的尺寸被设计成使得存在花键的地方略小于管的外径。因此,花键30将在这些区域中咬到管t的材料中。这确保了管t的可靠和稳健的配合,并且也为花键减少管的偏心提供了最大的机会。
58.现在将参照图5至图8更详细地描述连接器2(在本体1的每个端部处均有一个连接器2)。
59.连接器2由两个部件形成,即卡座40和套爪41。
60.卡座40具有大体上环形的构造。外表面设有多个柔性金属齿42。卡座40被插入到本体1的端部中,直到它抵靠第二台阶11座置。齿42抓持本体1的壁,以确保卡座40永久地被固持在本体1中。在卡座40相邻于第二台阶11的端部处,存在锥形的凸轮表面43,该凸轮表面43与套爪协作,如以下所描述的那样。在相对的端部处,卡座40的端面设有成对的斜坡表面44。尽管示出了两个这样的表面,但是可存在单个表面或者可存在多于两个的表面。每个斜坡表面在中间的倾斜面47内具有对应于解锁构造的低点45和对应于锁定构造的高点46。隆起块48设置在高点46和倾斜面47之间的接合部处。可在倾斜面47和低点45之间的接合部处设置类似的隆起块。低点45终止于第一端部止动件49处,并且高点46终止于第二端部止动件50处。
61.套爪41的大部分特征是常规的。它具有套爪环52,多个柔性臂53从该套爪环52延伸。每个臂在其远侧端部处具有头部54,同时设有向内伸出的金属齿55。
62.在管t被插入的情况下(例如,如在图8b中所示出的那样),倾向于将管t从连接器拉出的任何移动都导致齿55抓持到管中,这将头部54朝向使臂53向内偏转的卡座40上的锥形凸轮表面43拉动,以在管t上提供逐步增加的抓持力。该力用于将管t牢固地保持在适当位置。这是套爪操作的常规方式。
63.由本发明提供的改进是从套爪环52朝向卡座40上的斜坡表面44延伸的成对的凸轮从动件56的存在。尽管示出了两个从动件56,但实际上存在与斜坡表面44一样多的从动件56。备选地,凸轮布置可被反转,使得(多个)斜坡表面在套爪上,并且(多个)从动件在卡座上。
64.套爪环52还设有成对的凸块57,所述成对的凸块57从套爪环52沿与从动件56相对的方向延伸。如在附图中所示出的那样,凸块57的位置对应于从动件56的数目和位置。然而,情况可能不是这样。部件可相对于彼此偏移,并且两者的数目不需要相同。
65.现在将参照图6至图8来描述套爪41的操作。在图6a和图6b中所示出的位置是解锁位置。在该位置,套爪41已经被旋转,使得凸轮从动件56抵接第一端部止动件49,使得凸轮从动件在低点45处。如将从图6b(特别是当与图7b相比较时)显而易见的那样,在该位置,套爪41具有相对大的轴向自由度,因为它可从头部54与锥形凸轮表面43接合的位置一直向左移动到在该图中示出的位置(参照图6b)。如果由使用者保持在该位置,则管t可被撤出,因为头部54被保持远离锥形倾斜表面43,使得套爪不能抓持管。然后,套爪41在箭头60的方向上旋转到在图7a中所示出的锁定位置。在这样做时,从动件56沿着倾斜面57向上移动,越过隆起块48(从而向使用者提供已经到达位置的触觉感受)到高点46上。
66.如将从图6b和图7b的比较中理解的那样,在图7b中示出的锁定位置,套爪不具有像与图6b中相同的那样的自由度,使得它不能被移动和保持到齿55与管t脱离的解锁位置。这从图8a和图8b中更加显而易见,图8a和图8b示出套爪处于与在图7a和图7b中相同的锁定位置,但是管处于适当位置。在这里,可看到管的存在如何将头部54推回到锥形凸轮表面43上。
67.在这种锁定构造中,移除管t的唯一方式是使用者抓住凸块57,将套爪41在图6a中的箭头61的方向上旋转到解锁位置,并且在将管从本体1拉出的同时手动将套爪保持在图6b中所示出的位置。
68.管t通常会与套爪41一起插入在图6a和图6b所示出的解锁位置,因为这允许臂53在管插入时偏转的更大范围。然而,如可在图7b中看到的那样,即使在锁定位置,在头部54和锥形凸轮表面43之间也存在小的空隙。因此,有可能在套爪处于锁定位置的情况下插入管t。这提供了简单的组装过程,因为使用者仅需要被告知将管插入套爪中。他们不需要因锁定操作而困扰他们自己。
69.如可从图1a至图1c和图3中最好地看到的那样,套爪环52被设置成在轴向上后退到本体1内部。然而,凸块57延伸超过本体1的端部。在该位置,套爪41被保护而不受来自本体1的外部冲击。此外,因为它凹进在本体1内,所以在某种程度上,它被保护而免于接触土壤(线缆被掩埋在该土壤中)。利用该连接器,污垢可潜在地进入连接器的内部工作区的仅有的点位于套爪环52和管t之间以及套爪环52和本体1之间。然而,这些是能够应用紧密公差的接合部。进入这里的任何污垢都不会损害纤维f在本体1内的可见性。此外,由于解锁套爪所需的旋转动作,即使一些污垢真的进入到这些间隙中,也不太可能将套爪41卡住,因为旋转运动可容易地生成足够的扭矩来克服任何这样的卡滞。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。