1.本说明书中公开的技术(在下文中被称为“本公开内容”)涉及包括多条腿以执行移动工作的机器人装置。
背景技术:
2.例如,在物流领域,正在推动应用于负荷运输的腿式移动机器人的引入。这种类型的腿式移动机器人的工作空间不限于诸如工厂和仓库的水平地面,而是还包括室外区域、粗糙地面和斜坡,并且与人类的生活空间交叠,并且预期将发生与人类的交互,例如负荷的递送。
3.在其上放置有负荷的腿式移动机器人上坡的情况下,要求腿式移动机器人是紧凑的以不给人类带来压迫感并且抑制当放置负荷时重心的位置的波动。此外,为了在人群中使用腿式移动机器人,要求腿式移动机器人具有即使在与人交互时也不会引起任何问题的安全水平。从安全性或姿势稳定性的观点来看,用于运输负荷的包括四条或更多条腿的腿式移动机器人是有前景的。然而,在将负荷放置在这种类型的腿式移动机器人的躯体的上部上的状态下(参见例如专利文献1),重心的位置高,并且因此,尤其是当腿式移动机器人上坡或在粗糙地面上行走时,难以保持姿势稳定性。此外,在将负荷放置在躯体的上部上的状态下,全长较高,这可能会给周围的人带来压迫感。
4.此外,已经提出了一种机器人,其在躯体部坐在地板上的情况下用腿执行行走工作(参见例如专利文献2)。根据这种类型的机器人,降低重心使得可以确保安全性,但是由于在就座姿势下腿伸展到躯体外部,因此难以使机器人紧凑。
5.此外,假设用于运输负荷的机器人具有与人的交互,优选的是,对诸如腿的可移动部执行力控制。然而,当控制软件失控时,难以确保完全的安全性。此外,机器人的腿具有复杂的形状,并且难以附接安全传感器来全面地监视机器人的周围环境。考虑到异物的缠结例如手指夹入,腿的外部的形状复杂,这是大的设计约束。
6.引用列表
7.专利文献
8.专利文献1:日本专利申请特开第2017-109294号
9.专利文献2:日本专利申请特开第2016-74060号
技术实现要素:
10.发明要解决的问题
11.根据本公开内容的技术的目的是提供包括多条腿以执行移动工作的机器人装置。
12.问题的解决方案
13.已经考虑到上面的问题而作出根据本公开内容的技术,并且
14.提供了一种机器人装置,该机器人装置包括:
15.多条腿;以及
16.躯体部,腿附接至躯体部,躯体部的底表面高于最大程度地缩短的腿的接地面,其中
17.躯体部在由多条腿包围的空间中包括放置负荷的装载部。
18.机器人装置还包括覆盖包括多条腿的整个机器人装置的外壳。外壳包括在上表面、前表面、后表面、左侧表面或右侧表面中的至少之一上的开闭式的盖或门。
19.外壳的表面可以设置有可移除装饰。此外,可以将诸如周围观察传感器的传感器附接至外壳。另外,可以将能够显示广告信息等的显示器附接至外壳的表面。
20.发明的效果
21.根据基于本公开内容的技术,可以提供包括多条腿以执行移动工作的机器人装置,其以稳定的姿势安全地运输重物而不会缠结异物等。
22.注意,本说明书中描述的效果仅是示例,并且由根据本公开内容的技术带来的效果不限于此。另外,除了以上效果之外,根据本公开内容的技术还可以发挥另外的效果。
23.根据本公开内容的技术的其他目的、特性和优点将通过基于下面描述的实施方式和附图的更详细描述来阐明。
附图说明
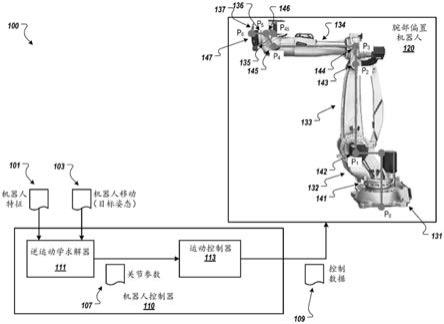
24.图1是示出机器人装置100的自由度的构造示例的图(透视图)。
25.图2是示出机器人装置100的自由度的构造示例的图(前视图)。
26.图3是示出机器人装置100的自由度的构造示例的图(后视图)。
27.图4是示出机器人装置100的自由度的构造示例的图(左侧视图)。
28.图5是示出机器人装置100的自由度的构造示例的图(俯视图)。
29.图6是示出将外壳600附接至机器人装置100的状态的图(透视图)。
30.图7是示出将外壳600附接至机器人装置100的状态的图(前视图)。
31.图8是示出将外壳600附接至机器人装置100的状态的图(俯视图)。
32.图9是示出将外壳600附接至机器人装置100的状态的图(左侧视图)。
33.图10是示出将开闭式的盖附接至机器人装置100的外壳600的上表面的状态的图。
34.图11是示出将开闭式的前门附接至机器人装置100的外壳600的前表面的状态的图。
35.图12是示出将开闭式的侧门附接至机器人装置100的外壳600的左侧表面的状态的图。
36.图13是示出机器人装置100的电气系统的配置示例的图。
37.图14是用于描述可移动腿与躯体部之间的关系的图。
38.图15是示出将不透明外壳600附接至机器人装置100的状态的图(透视图)。
39.图16是示出躯体部与外壳之间的连接结构的图(透视图)。
40.图17是示出躯体部与外壳之间的连接结构的图(后视图)。
41.图18是示出躯体部与外壳之间的连接结构的图(左侧视图)。
42.图19是示出躯体部与外壳之间的连接结构的图(俯视图)。
43.图20是示出支承外壳的框架与可移动腿的可移动范围之间的关系的图(透视图)。
44.图21是示出支承外壳的框架与可移动腿的可移动范围之间的关系的图(左侧视
图)。
45.图22是示出支承外壳的框架与可移动腿的可移动范围之间的关系的图(俯视图)。
46.图23是示出外壳的修改示例的图。
47.图24是示出将周围观察传感器附接至外壳的状态的图。
48.图25是示出将表面显示器安装在外壳的壁表面上的状态的图。
49.图26是示出将机器人装置应用于个人移动的修改示例的图。
50.图27是示出将机器人装置应用于个人移动的修改示例的图。
51.图28是示出将装载平台倾斜机构设置在机器人装置的装载部中的修改示例的图。
52.图29是示出将装载平台倾斜机构设置在机器人装置的装载部中的修改示例的图。
53.图30是示出包括各自具有线性致动器机构的可移动腿的机器人装置100的构造示例的图(透视图)。
54.图31是示出包括各自具有线性致动器机构的可移动腿的机器人装置100的构造示例的图(前视图)。
55.图32是示出包括各自具有线性致动器机构的可移动腿的机器人装置100的构造示例的图(后视图)。
56.图33是示出包括各自具有线性致动器机构的可移动腿的机器人装置100的构造示例的图(左侧视图)。
57.图34是示出包括各自具有线性致动器机构的可移动腿的机器人装置100的构造示例的图(俯视图)。
58.图35是用于描述可移动腿与躯体部之间的关系的图。
具体实施方式
59.在下文中,将参照附图详细描述根据本公开内容的技术的实施方式。
60.a.装置构造
61.图1至图5示意性地示出了应用根据本公开内容的技术的机器人装置100的自由度的构造示例。在这些图中,图1是从左前方看的机器人装置100的透视图,图2是机器人装置100的前视图,图3是机器人装置100的后视图,图4是机器人装置100的左侧视图,并且图5是机器人装置100的俯视图。
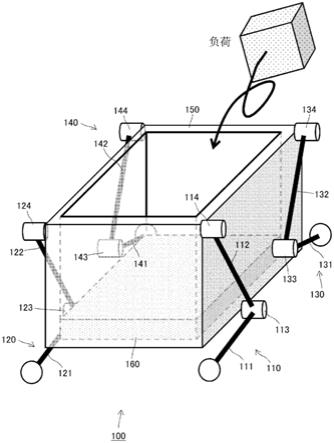
62.示出的机器人装置100被构造为包括四条可移动腿的四足行走机器人。即,机器人装置100包括行走机器人的躯体部150和各自连接至躯体部150的四个角中的对应一个角的四条可移动腿110、120、130和140。躯体部150具有中空箱体形状并且用作用于装载负荷的装载部,并且负荷可以通过上表面等上的开口拿进拿出。可以说结构使得将负荷放置在由四条可移动腿110、120、130和140包围的空间中。此外,容纳诸如控制电路和用于驱动的电池的电气系统的控制器160安装在躯体部150的底表面部上。另外,腿110是左前腿(lf),腿120是右前腿(rf),腿130是左后腿(lr),并且腿140是右后腿(rr)。机器人装置100可以通过同步操作腿110、120、130和140(同时在站立腿与摆动腿之间交替地切换)来行走。此外,假设机器人装置100运输放置在躯体部150上的负荷。机器人装置100应用于物流领域,并且例如,从最终基地到递送的时间运输负荷。
63.与左前腿对应的腿110包括两个连杆111和112以及连接连杆111与连杆112的膝关
节部113。连杆111的与小腿部对应的另一端(下端)对应于脚尖并且与地板表面接触。此外,连杆112的与大腿部对应的上端经由髋关节部114附接至躯体部150。膝关节部113具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于连杆112绕俯仰轴驱动连杆111。此外,髋关节部114具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于躯体部150绕俯仰轴驱动连杆112。
64.此外,与右前腿对应的腿120包括两个连杆121和122以及连接连杆121与连杆122的膝关节部123。连杆121的与小腿部对应的另一端(下端)对应于脚尖并且与地板表面接触。此外,连杆122的与大腿部对应的上端经由髋关节部124附接至躯体部150。膝关节部123具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于连杆122绕俯仰轴驱动连杆121。此外,髋关节部124具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于躯体部150绕俯仰轴驱动连杆122。
65.此外,与左后腿对应的腿130包括两个连杆131和132以及连接连杆131与连杆132的膝关节部133。连杆131的与小腿部对应的另一端(下端)对应于脚尖并且与地板表面接触。此外,连杆132的与大腿部对应的上端经由髋关节部134附接至躯体部150。膝关节部133具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于连杆132绕俯仰轴驱动连杆131。此外,髋关节部134具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于躯体部150绕俯仰轴驱动连杆132。
66.此外,与右后腿对应的腿140包括两个连杆141和142以及连接连杆141与连杆142的膝关节部143。连杆141的与小腿部对应的另一端(下端)对应于脚尖并且与地板表面接触。此外,连杆142的与大腿部对应的上端经由髋关节部144附接至躯体部150。膝关节部143具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于连杆142绕俯仰轴驱动连杆141。此外,髋关节部144具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于躯体部150绕俯仰轴驱动连杆142。
67.可移动腿110、120、130和140各自具有两个自由度,即绕膝关节的俯仰轴的旋转自由度和绕髋关节的俯仰轴的旋转自由度,并且整个机器人装置100具有八个自由度。尽管图1中示出的机器人装置100包括四条腿,但是应当理解,即使机器人装置100配备有两条腿、三条腿或者五条或更多条腿,也可以应用根据本公开内容的技术。
68.图6至图9示出了将外壳600附接至机器人装置100的主体的状态。为方便起见,外壳600被绘制成半透明,但是在实践中,使用不透明外壳600以免影响美学外观(替选地,外壳600可以是透明的以增加设计着重点)。在这些图中,图6是从左前方观看的附接有外壳600的机器人装置100的透视图,图7是机器人装置100的前视图,图8是机器人装置100的左侧视图,并且图9是机器人装置100的俯视图。
69.在图1至图5中,为方便起见,可移动腿110、120、130和140中的每一个被简化并绘制为包括连杆和关节的多连杆结构,但是在实践中,每条腿的外部具有复杂的形状,并且考虑到异物的缠结例如手指夹入,会引起大的设计约束。同时,如图6至图9所示,用外壳600覆盖包括可移动腿110、120、130和140的整个机器人装置100消除对由可移动腿110、120、130和140引起的异物缠结例如手指夹入的考虑的需要,这增加了设计自由度。此外,用外壳600隐藏各自具有复杂的外部形状的可移动腿110、120、130和140提供了改进机器人装置100的美学外观的优点。
70.在图6至图9中,为了简化而绘制了普通外壳600,但是对外壳600的壁表面应用可移除的装饰等使得可以以低成本灵活地改变外部设计以根据用户的要求诉诸于用户的灵敏度。替选地,可以将广告介质而不是装饰应用于外壳600。
71.注意,在将外壳600附接至机器人装置100的主体的情况下,可以考虑用于访问设置在躯体部150上的装载部的各种方法。例如,可以提及以下方法:从机器人装置100的主体移除外壳600的方法(移除外壳600的状态类似于图1中的状态);在外壳600的上表面上设置开闭式的上盖1001的方法(参见图10);在外壳600的前表面上设置开闭式的前门1101的方法(参见图11);在外壳600的后表面上设置开闭式的后门的方法(参见图11);在外壳600的左侧表面(或右侧表面)上设置开闭式的侧门1201的方法(参见图12);等等。
72.图1至图12示出了包括各自包括多连杆结构的四条可移动腿110、120、130和140的机器人装置100的构造示例。可移动腿110、120、130和140各自包括连接至躯体部150的髋关节部、大腿连杆、膝关节部和小腿连杆。然而,每条可移动腿的构造不限于此。例如,可以通过用线性致动器机构代替多连杆结构来构造每条可移动腿。
73.图30至图34示意性地示出了包括各自具有线性致动器机构的可移动腿的机器人装置100的构造示例。在这些图中,图30是从左前方看的机器人装置100的透视图,图31是机器人装置100的前视图,图32是机器人装置100的后视图,图33是机器人装置100的左侧视图,并且图34是机器人装置100的俯视图。
74.机器人装置100包括行走机器人的躯体部150和各自连接至躯体部150的四个角中的对应一个角的四条可移动腿3010、3020、3030和3040。躯体部150具有中空箱体形状并且用作用于装载负荷的装载部,并且负荷可以通过上表面等上的拿进拿出。可以说结构使得将负荷放置在由四条可移动腿3010、3020、3030和3040包围的空间中。此外,容纳诸如控制电路和用于驱动的电池的电气系统的控制器160安装在躯体部150的底表面部上。另外,腿3010是左前腿(lf),腿3020是右前腿(rf),腿3030是左后腿(lr),并且腿3040是右后腿(rr)。机器人装置100可以通过同步操作腿3010、3020、3030和3040(同时在站立腿与摆动腿之间交替地切换)来行走。
75.与左前腿对应的腿3010包括具有中空圆柱形状的圆筒3012和能够从圆筒3012中伸出并缩回到其中的杆3011。在圆筒3012中,布置有通过使用液压、气压、滚珠丝杠等在纵向方向上驱动杆3011的线性致动器。腿3010的总长度根据杆3011的驱动位置而改变。杆3011的与小腿部对应的下端对应于脚尖。此外,圆筒3012的与大腿部对应的上端经由髋关节部3014附接至躯体部150。髋关节部3014具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于躯体部150绕俯仰轴驱动整条腿3010。
76.此外,与右前腿对应的腿3020包括具有中空圆柱形状的圆筒3022和能够从圆筒3022中伸出并缩回到其中的杆3021。在圆筒3022中,布置有在纵向方向上驱动杆3021的线性致动器,并且腿3020的总长度根据杆3021的驱动位置而改变。杆3021的与小腿部对应的下端对应于脚尖。此外,圆筒3022的与大腿部对应的上端经由髋关节部3024附接至躯体部150。髋关节部3024具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于躯体部150绕俯仰轴驱动整条腿3020。
77.此外,与左后腿对应的腿3030包括具有中空圆柱形状的圆筒3032和能够从圆筒3032中伸出并缩回到其中的杆3031。在圆筒3032中,布置有在纵向方向上驱动杆3031的线
性致动器,并且腿3030的总长度根据杆3031的驱动位置而改变。杆3031的与小腿部对应的下端对应于脚尖。此外,圆筒3032的与大腿部对应的上端经由髋关节部3034附接至躯体部150。髋关节部3034具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于躯体部150绕俯仰轴驱动整个腿3030。
78.此外,与右后腿对应的腿3040包括具有中空圆柱形状的圆筒3042和能够从圆筒3042中伸出并缩回到其中的杆3041。在圆筒3042中,布置有在纵向方向上驱动杆3041的线性致动器,并且腿3040的总长度根据杆3041的驱动位置而改变。杆3041的与小腿部对应的下端对应于脚尖。此外,圆筒3042的与大腿部对应的上端经由髋关节部3044附接至躯体部150。髋关节部3044具有绕俯仰轴的旋转自由度,并且可以通过诸如俯仰轴旋转马达的致动器(未示出)相对于躯体部150绕俯仰轴驱动整个腿3040。
79.可移动腿3010、3020、3030和3040各自具有两个自由度,即线性运动自由度和绕髋关节的俯仰轴的旋转自由度,并且整个机器人装置100具有八个自由度。尽管图1中示出的机器人装置100包括四条腿,但是应当理解,即使机器人装置100配备有两条腿、三条腿或者五条或更多条腿,也可以应用根据本公开内容的技术。
80.图13示出了机器人装置100的电气系统的配置示例。
81.机器人装置100包括外部传感器单元210,其中用作机器人装置100的左右“眼睛”的摄像装置211l和211r、用作“耳朵”的麦克风212、触摸传感器213等各自布置在预定位置处。对于摄像装置211l和211r中的每一个,例如,使用包括诸如互补金属氧化物半导体(cmos)或电荷耦合器件(ccd)的图像传感器的摄像装置。
82.注意,外部传感器单元210还可以包括未示出的其他传感器。例如,外部传感器单元210包括各自检测作用在腿110、120、130和140中的对应一条腿的第一关节和第二关节上的旋转扭矩的扭矩传感器、各自检测关节角度的编码器、各自测量作用在腿110、120、130和140中的对应一条腿的脚底上的地板反作用力的脚底传感器等。每个脚底传感器包括例如六自由度(dof)力传感器等。替选地,外部传感器单元210包括各自检测作用在可移动腿3010、3020、3030和3040中的对应一条腿上的扭矩的扭矩传感器、各自检测杆3011、3021、3031和3041中的对应一个杆的纵向移动量的编码器、用于可移动腿3010、3020、3030和3040的脚底传感器等。
83.此外,外部传感器单元210可以包括能够测量或估计预定目标的方向和距离的传感器,例如激光成像检测和测距(lidar)、飞行时间(tof)传感器或激光测距传感器。另外,外部传感器单元210可以包括全球定位系统(gps)传感器、红外传感器、温度传感器、湿度传感器、照度传感器等。
84.此外,外部传感器单元210可以包括附接至外壳600等的周围观察传感器(稍后描述)。周围观察传感器包括例如红外传感器、电容式人体检测传感器、触觉传感器、气压传感器等。
85.此外,在机器人装置100中,作为输出单元的扬声器221、显示单元222等各自布置在预定位置处。例如,扬声器221用于输出语音并提供语音引导。此外,显示单元222显示机器人装置100的状态和对用户的响应。
86.在控制单元230中,布置有主控制器231、电池232、包括电池传感器233a和加速度传感器233b等的内部传感器单元233、外部存储器234和通信单元235。
87.外部传感器单元210的摄像装置211l和211r捕获周围环境的图像并且将获得的图像信号s1a发送至主控制器231。麦克风212收集从用户输入的语音并且将获得的语音信号s1b发送至主控制器231。由用户给予机器人装置100的输入语音包括开始文字、诸如“行走”、“右转”、“快点”和“停止”的各种命令语音(语音命令)等。注意,尽管在图2中绘制了仅一个麦克风82,但是可以像左耳和右耳那样设置两个或更多个麦克风来估计声源方向。
88.此外,外部传感器单元210的触摸传感器213例如放置在装载部的放置表面上,检测在放置负荷的地方接收的压力,并且将检测结果发送至主控制器231作为压力检测信号s1c。
89.内部传感器单元233的电池传感器233a以预定周期检测电池232的剩余能量,并且将检测结果作为电池剩余量检测信号s2a发送至主控制器231。
90.加速度传感器233b以预定周期检测机器人装置100的移动在三个轴向方向(x(滚转)轴、y(俯仰)轴和z(横摆)轴)上的加速度,并且将检测结果作为加速度检测信号s2b发送至主控制器231。加速度传感器233b可以是例如配备有三轴陀螺仪、三向加速度传感器的惯性测量单元(imu)等。可以利用imu测量机器人装置100的主体的角度和加速度。
91.外部存储器234存储程序、数据、控制参数等,并且根据需要将程序和数据提供给内置在主控制器231中的存储器231a。此外,外部存储器234从存储器231a接收数据等并且存储数据等。注意,外部存储器234例如可以被配置为诸如sd卡的盒式存储卡,并且可以是能够从机器人装置100的主体(或控制单元230)拆卸的。
92.通信单元235例如基于诸如wi-fi(注册商标)或长期演进(lte)的通信方法来执行与外部的数据通信。例如,可以经由通信单元235从外部获取诸如由主控制器231执行的应用的程序和执行该程序所需的数据。
93.主控制器231包括内置存储器231a。存储器231a存储程序和数据,并且主控制器231执行存储在存储器231a中的程序以执行各种类型的处理。即,主控制器231基于分别从外部传感器单元210的摄像装置211l和211r、麦克风212和触摸传感器213提供的图像信号s1a、语音信号s1b和压力检测信号s1c(在下文中,这些被统称为外部传感器信号s1)以及分别从内部传感器单元233的电池传感器233a和加速度传感器233b提供的电池剩余量检测信号s2a和加速度检测信号s2b(在下文中,这些被统称为内部传感器信号s2),确定机器人装置100的周围和内部状况、来自用户的命令、来自用户的动作的存在或不存在等。注意,存储器231a可以预先存储关于机器人装置100的主体的重量和重心的位置的信息。
94.主控制器231然后基于机器人装置100的周围和内部状况、来自用户的命令、或来自用户的动作的存在或不存在的确定结果、以及预先存储在内部存储器231a中的控制程序或当时加载的存储在外部存储器234中的各种控制参数,判定机器人装置100的动作或要为用户激活的表达动作,基于判定结果来生成控制命令,并且将控制命令发送至子控制器241、242等。
95.子控制器241、242等各自负责机器人装置100中的子系统中的对应一个子系统的操作控制,并且基于从主控制器231提供的控制命令来驱动子系统。上述可移动腿110、120、130和140(或可移动腿3010、3020、3030和3040)对应于子系统,并且分别由子控制器241、242、243、244等驱动和控制。在该实施方式中,假设例如当运输负荷等时在机器人装置100与人之间存在交互,并且力控制应用于可移动腿110、120、130和140(或可移动腿3010、
3020、3030和3040)的控制。
96.b.机器人装置的稳定性
97.随后,将描述图1至图12中示出的机器人装置中的可移动腿110、120、130和140与躯体部150之间的关系。在描述中,假设可移动腿110、120、130和140在左右方向或前后方向上具有对称形状,被构造有相同的尺寸和形状,并且在左右方向或前后方向上的对称位置处附接至躯体部150,并且这里,可移动腿110与躯体部150之间的关系将作为代表被描述。
98.可移动腿110在躯体部150的上端附近经由髋关节部114连接。大腿连杆112的长度(或髋关节连杆114与膝关节113之间的距离)为l(这同样适用于其他可移动腿120、130和140)。距离l对应于可移动腿110弯曲(或最大程度地缩短)时的总长度。在图14中示出的示例中,可移动腿110的大腿连杆112处于竖直向下姿势。从图中可以看到,躯体部150的底表面在膝关节113附近或高于膝关节113。换言之,如果从躯体部150的底表面到髋关节部114附近的高度为h,则l>h成立。也可以说,躯体部150的底表面被设置为高于当最大程度地缩短的可移动腿110处于竖直向下姿势时的接地面。
99.此外,躯体部150(也包括外壳600)被构造成使得将躯体部150的重心g布置在髋关节114与膝关节113之间的距离l的三分之一以下。如果将躯体部150的重心g布置在髋关节114与膝关节113之间的距离的一半以下,则机器人装置100的姿势进一步稳定。如上所述,躯体部150具有中空箱体形状,包括用于装载负荷的装载部,并且具有将负荷放置在由四条可移动腿110、120、130和140包围的空间中的结构。因此,可以确保负荷的最大储存空间。当放置负荷时,包括负荷的躯体部150的重量的重心的位置进一步降低,并且机器人装置100的姿势进一步稳定。躯体部150也是其上放置有负荷的容器,并且因此可以以具有强度的结构来制造。
100.采用这样的结构,可以降低腿式机器人装置100的重心。此外,即使将负荷放置在机器人装置100上,与专利文献2中描述的机器人不同,腿也不会向外伸开,并且可以实现紧凑性。
101.另外,采用躯体部150的底表面被布置在平面1401上方的结构,该平面1401被布置在当可移动腿110的大腿连杆112处于竖直向下姿势时髋关节114与膝关节113之间的距离l处。因此,在为用于装载负荷的装载部确保最大空间的同时,可以避免当机器人装置100移过粗糙地面或台阶时躯体部150的底表面与地板表面之间的干扰。
102.总结以上描述,需要以下两个要求来确保机器人装置100的稳定性。
103.(1)最大程度地缩短可移动腿时的长度l>躯体部的高度h。
104.(2)躯体部的重心g被布置在最大程度地缩短可移动腿时的长度l的三分之一以下。
105.还将考虑在图30至图34中示出的包括各自具有线性致动器机构的可移动腿的机器人装置100的稳定性。
106.可移动腿3010在躯体部150的上端附近经由髋关节部3014连接。杆3011最大程度地从圆筒3012伸出的可移动腿3010的最大长度为l
max
,并且可移动腿3010在杆3011尽可能地存放在圆筒3012中并且可移动腿3010最大程度地缩短时的长度为4/7l
max
(这同样适用于其他可移动腿3020、3030和304)。在图35中示出的示例中,可移动腿3010和3030中的每一个均处于竖直向下姿势。从图中可以看到,当最大程度地缩短可移动腿3030时,躯体部150的
底表面高于可移动腿3030的脚尖。因此,如果从躯体部150的底表面到髋关节部3034附近的高度为h,则4/7l
max
>h成立。躯体部150的底表面被布置为高于当最大程度地缩短的可移动腿3030处于竖直向下姿势时的接地面。
107.此外,躯体部150(也包括外壳600)被构造成使得将躯体部150的重心布置在可移动腿3010的最大长度l
max
的五分之一以下。如果重心g进一步向下布置,则机器人装置100的姿势进一步稳定。如上所述,躯体部150具有中空箱体形状,包括用于装载负荷的装载部,并且具有将负荷放置在由四条可移动腿110、120、130和140包围的空间中的结构。因此,可以确保负荷的最大储存空间。当放置负荷时,包括负荷的躯体部150的重量的重心的位置进一步降低,并且机器人装置100的姿势进一步稳定。躯体部150也是其上放置有负荷的容器,并且因此可以以具有强度的结构来制造。
108.采用这样的结构,可以降低腿式机器人装置100的重心。此外,即使将负荷放置在机器人装置100上,与专利文献2中描述的机器人不同,腿也不会向外伸开,并且可以实现紧凑性。
109.c.机器人装置的安全性
110.如图6至图9所示,外壳600附接至机器人装置100的主体,该机器人装置100包括躯体部150和附接为包围躯体部150的四条可移动腿110、120、130和140。
111.可移动腿110、120、130和140中的每一条均被简化和绘制,但是在实践中,每条腿的外部具有复杂的形状,并且考虑到异物的缠结例如手指夹入,会引起大的设计约束。同时,如图6至图9所示,用外壳600覆盖包括可移动腿110、120、130和140的整个机器人装置100使得可以可靠地防止异物缠结在可移动腿110、120、130和140中例如手指夹入。
112.在图6至图9中,为方便起见,外壳600被绘制成半透明。在实践中,如图15所示使用不透明外壳600,以免影响美学外观。在该情况下,机器人装置100是从底部只能看到脚尖的长方体,并且在周围观察机器人装置100的人可以直观地理解机器人装置100在长方体的纵向方向上移动。即,由于人能够一眼看出在机器人装置100向前和向后移动的情况下假设的可移动范围,因此容易掌握人能够接近机器人装置100的范围。
113.d.机器人装置的刚性
114.如图10至图12所示,在附接至机器人装置100的主体的外壳600的上表面、前表面、后表面、侧表面等上布置开闭式的盖或门使得更容易将负荷装载在躯体部150的装载部上和从装载部卸载负荷。尽管图10至图12示出了盖或门布置在一处的示例,但是盖或门可以布置在两处或更多处。
115.图16至图19示意性地示出了躯体部150(或机器人装置100的主体)与外壳600之间的连接结构。在这些图中,图16是从左前方看的机器人装置100的透视图,图17是机器人装置100的后视图,图18是机器人装置100的左侧视图,图19是机器人装置100的俯视图,并且在每种情况下,由点划线表示外壳600的轮廓。
116.在图16至图19中,以灰色示出躯体部150通过其支承外壳600的框架1600的结构。然而,为了防止图被复杂化,框架1600被粗略地绘制而省略了一部分。框架1600包括与外壳600的上表面的三个连接部1601、1602和1603。此外,框架1600包括与外壳600的下端边缘的四个连接部1611、1612、1613和1614。
117.三个连接部1601、1602和1603在外壳600的上表面的前方中心和后方左右端附近
支承外壳600,但是不干扰可移动腿110、120、130和140的可移动范围中的任何可移动范围。此外,与外壳600的下端边缘的四个连接部1611、1612、1613和1614分别在躯体部150的前方中心、左侧中心、后方中心和右侧中心附近支承外壳600的下端边缘,但是不干扰可移动腿110、120、130和140的脚尖轨迹。
118.图20至图22示出了支承外壳600的框架1600与可移动腿110、120、130和140的可移动范围2001、2002、2003和2004之间的关系。在这些图中,图20是从左前方看的机器人装置100的透视图,图21是机器人装置100的左侧视图,并且图20是机器人装置100的俯视图。从每个图可以理解,框架1600在连接部1601、1602和1603以及连接部1611、1612、1613和1614处支承外壳600,而不干扰可移动腿110、120、130和140的脚尖轨迹。
119.此外,框架1600可以以高刚性支承覆盖可移动腿110、120、130和140的外壳600。因此,在将诸如摄像装置或lidar的传感器附接至外壳600的情况下,可以抑制由于振动而引起的灵敏度劣化。另外,如果将摄像装置布置在可移动腿110、120、130或140中的至少之一周围,则可以检测关于道路表面、障碍物等的大范围的周边信息。因此,可以基于捕获图像的识别结果来确保安全的行走。
120.注意,外壳600可以具有透明结构,并且可以将摄像装置211布置在外壳600内部。替选地,布置有摄像装置211的外壳600的仅一部分可以部分地具有透明结构,或者外壳600可以设置有用于从外壳600内部的摄像装置211观看外部世界的窗或窥视孔。
121.e.修改示例(1)
122.图23示出了外壳600的在可移动腿110、120、130和140的脚尖周围的填充有点的部分2301、2302、2303等。这些区域2301、2302、2303等由诸如薄硅橡胶的柔性材料、帘或波纹管构造,使得对应于前腿的可移动腿110和120的可移动范围可以向前扩展,并且对应于后腿的可移动腿130和140的可移动范围可以向后扩展。此外,可移动腿110、120、130和140的运动范围覆盖有柔性材料、帘或波纹管,使得可以防止手指被可移动腿110、120、130和140夹入,而不会妨碍脚尖的运动范围。
123.f.修改示例(2)
124.图24示出了周围观察传感器2401、2402等附接至外壳600的部分的状态。在图24中,周围观察传感器2401、2402等为简化起见附接至仅两处,但是可以附接至多处。
125.周围观察传感器2401、2402等各自包括例如红外传感器、电容式人体检测传感器、触觉传感器、气压传感器等。取决于传感器所附接的部件,可以使用不同类型的传感器。当利用周围观察传感器2401和2402中的之一检测到人已经进入接近区域时,主控制器231可以调整其他传感器的灵敏度,或者执行避免与人或障碍物碰撞的控制例如安全的停止,或在发生碰撞时减轻冲击的控制。周围观察传感器2401、2402等可以被布置成使得可以在所有方向上检测到接近。
126.g.修改示例(3)
127.图25示出了表面显示器2500安装在外壳600的壁表面(示出的示例中的左侧表面)上的状态。表面显示器2500上显示的信息是变化的。主控制器231基于从外部传感器单元210等获得的信息来控制在表面显示器2500上显示的图像信息。例如,主控制器231在表面显示器2500上显示机器人装置100的所有者的名称、使用机器人装置100提供运输服务的经营者的名称、关于正在运输的负荷的信息(需要冷藏、危险物质等)、以及基于机器人装置
100的当前位置、移动路线、目的地等的信息。此外,主控制器231可以基于在场的人的属性信息来选择要在显示显示器2500上显示的图像,所述在场的人是基于由摄像装置211捕获的图像的面部识别或其他传感器的检测结果而被识别的。
128.此外,主控制器231可以控制表面显示器2500显示广告信息。将广告信息显示在表面显示器2500上,使得机器人装置100也可以用作盈利的数字标牌。广告信息可以是静止图像或运动图像。可以经由通信单元235接收在表面显示器2500上显示的图像。在表面显示器2500上显示的广告信息可以按小时或实时切换。例如,可以在表面显示器2500上显示正在运输的负荷的内容、与运输的请求者有关的广告信息、或与运输路线有关的广告信息。
129.h.修改示例(4)
130.上面已经描述了将机器人装置100应用于负荷的运输并且负荷被放置在设置有中空的躯体部150的装载部上以被运输的实施方式。同时,如图26所示,可以考虑人坐在椅子形状的外壳2600中并且将机器人装置100应用于个人移动的修改示例。图27还示出了就座的人的图像。
131.通过图26与图20的比较可以看到,外壳2600包括左扶手2601和右扶手2602以及靠背2603以保护可移动腿110、120、130和140的可移动范围2001、2002、2003和2004,并且具有椅子的形状,其中躯体部160(或控制器150)的上表面用作座椅表面2604。可以说,个人移动是通过人坐在由四条可移动腿110、120、130和140包围的空间中的结构实现的。椅子形状的外壳2600可以防止可移动腿110、120、130和140与人腿之间的干扰,并且可以确保人的安全。
132.i.修改示例(5)
133.如上述部分a所述,躯体部150具有中空箱体形状并且包括用于装载负荷的装载部。如图28所示,可以采用装载部的底表面上的装载平台2800在顶端处由旋转驱动单元2801可旋转地支承的结构。然后,如图29所示,当旋转驱动单元2801被驱动并且装载平台2800的后端向下倾斜形成斜坡时,负荷由于重力而滑下斜坡,并且因此可以很容易地实现卸载。
134.机器人装置100的电气系统(参见图13)可以包括控制旋转驱动单元2801的驱动的子控制器。此外,如果主控制器231支持旋转驱动单元2801的驱动并且在机器人装置100到达负荷运输目的地时倾斜装载平台2800,则可以实现自主卸载操作。
135.j.总结
136.最后,将提及应用了根据本公开内容的技术的腿式机器人装置100所带来的效果。
137.(1)机器人装置100具有这样的结构,其中可移动腿110、120、130和140的髋关节部114、124、134和144连接至躯体部150的上端附近,并且可以将躯体部150的重心g布置在每条可移动腿的髋关节与膝关节之间的距离的三分之一以下,使得可以保持低重心并稳定姿势。
138.(2)机器人装置100具有这样的结构,其中躯体部150具有中空箱体形状并且包括用于装载负荷的装载部,并且将负荷放置在由四条可移动腿110、120、130和140包围的空间中,使得可以确保负荷的最大储存空间并且实现紧凑性。
139.(3)机器人装置100具有躯体部150用框架1600支承外壳600的结构,使得可以在确保减轻重量的同时提高躯体部150的强度。
140.(4)在机器人装置100中,躯体部150可以是薄的。
141.(5)用外壳600覆盖包括可移动腿110、120、130和140的整个机器人装置100使得可以防止异物缠结在可移动腿110、120、130和140中例如手指夹入。
142.(6)机器人装置100为外壳600提供上盖、前门、后门和侧门中之一,使得可以容易地取出装载在躯体部150的装载部上的负荷。
143.(7)可以一眼看出机器人装置100随腿移动的可移动范围,使得容易掌握人能够接近机器人装置100的范围。
144.(8)机器人装置100可以确保覆盖可移动腿110、120、130和140的外壳600的刚性,使得可以抑制由于附接至外壳600的传感器的振动而引起的灵敏度劣化。
145.(9)在机器人装置100中,将周围观察传感器2401、2402等附接至外壳600使得可以执行避免与人或障碍物的碰撞或在发生碰撞时减轻冲击的控制。
146.(10)将外壳600附接至机器人装置100以不干扰可移动腿110、120、130和140的可移动范围中的任何可移动范围,使得可以确保可移动腿110、120、130和140的运动范围。此外,外壳600的在可移动腿110、120、130和140的脚尖周围的部分由诸如薄硅橡胶的柔性材料、帘或波纹管构造,使得可以实现安全性和紧凑性,并且同时确保脚尖的更大范围的运动。
147.(11)在机器人装置100中,诸如对外壳600的壁表面应用可移除装饰等的方法使得可以以低成本灵活地改变外部设计,以根据用户的要求诉诸于用户的灵敏度。
148.(12)在机器人装置100中,将周围观察传感器附接至外壳600使得可以执行避免与人或障碍物的碰撞和在碰撞时减轻冲击的控制。
149.(13)在机器人装置100中,在可移动腿110、120、130和140周围布置诸如摄像装置的传感器使得可以检测关于道路表面、障碍物等的大范围的周边信息。
150.(14)机器人装置100可以通过使用布置在外壳600的壁表面上的表面显示器2500的数字标牌来盈利。
151.(15)机器人装置100可以通过将外壳600制成椅子的形状并且允许人就座来应用于个人移动。椅子形状的外壳2600可以防止可移动腿110、120、130和140与人腿之间的干扰,并且可以确保人的安全。
152.(16)机器人装置100可以通过倾斜其上放置有负荷的装载平台2800形成斜坡来容易地卸载负荷,使得可以实现自主卸载。
153.(17)机器人装置100具有这样的结构,其中将躯体部150的底表面布置在平面1401上方,该平面1401被布置在髋关节114与膝关节113之间的距离l处。因此,可以避免当机器人装置100移过粗糙地面或台阶时躯体部150的底表面与地板表面之间的干扰,同时为装载部装载对象确保最大空间。
154.工业适用性
155.上面已经参照具体实施方式详细描述了根据本公开内容的技术。然而,明显的是本领域技术人员可以在不脱离根据本公开内容的技术的要旨的情况下修改实施方式或者用实施方式的替代物来代替实施方式。
156.尽管本说明书主要描述了将根据本公开内容的技术应用于四腿机器人装置的实施方式,但是技术可以类似地应用于包括任何数目的腿的腿式移动机器人。
157.简言之,已经以示例的形式描述了根据本公开内容的技术,并且不应当以限制方式解释本说明书的内容。应当考虑权利要求以确定根据本公开内容的技术的要旨。
158.注意,根据本公开内容的技术还可以具有以下配置。
159.(1)一种机器人装置,包括:
160.多条腿;以及
161.躯体部,所述腿附接至所述躯体部,所述躯体部的底表面高于最大程度地缩短的所述腿的接地面。
162.(1-1)根据(1)的机器人装置,其中
163.所述腿中的每一条具有包括膝关节的多连杆结构,并且附接至所述躯体部,使得所述躯体部的底表面在所述腿中的每一条的膝关节附近。
164.(1-2)根据(1)的机器人装置,其中
165.所述腿中的每一条具有线性运动机构,并且附接至所述躯体部,使得其线性运动机构最大程度地缩短的所述腿中的每一个的脚尖高于所述躯体部的底表面。
166.(2)根据(1)的机器人装置,其中,
167.所述躯体部包括在由所述多条腿包围的空间中放置负荷的装载部。
168.(3)根据(1)或(2)的机器人装置,还包括
169.覆盖包括所述多条腿的整个机器人装置的外壳。
170.(4)根据(3)的机器人装置,其中,
171.所述外壳包括在上表面、前表面、后表面、左侧表面或右侧表面中的至少之一上的开闭式的盖或门。
172.(5)根据(3)或(4)的机器人装置,还包括
173.连接所述外壳与所述躯体部以不干扰所述腿的可移动范围的框架。
174.(6)根据(3)至(5)中任一项的机器人装置,其中,
175.将摄像装置或另一传感器布置在所述外壳的腿周围。
176.(7)根据(3)至(6)中任一项的机器人装置,其中,
177.所述外壳的在所述腿中的每一条的脚尖周围的一部分由柔性材料或可扩展部件构造。
178.(8)根据(3)至(7)中任一项的机器人装置,其中,
179.所述外壳的表面设置有可移除装饰。
180.(9)根据(3)至(8)中任一项的机器人装置,还包括
181.附接至所述外壳并且检测接近对象的传感器。
182.(10)根据(9)的机器人装置,其中,
183.所述传感器包括红外传感器、电容式人体检测传感器、触觉传感器或气压传感器中之一。
184.(11)根据(9)或(10)的机器人装置,还包括
185.基于所述传感器的检测结果来控制所述机器人装置的安全停止或其他操作的控制器。
186.(12)根据(3)至(11)中任一项的机器人装置,还包括
187.布置在所述外壳内部的摄像装置,其中,所述外壳在所述摄像装置的视场范围内
包括透射部或开口。
188.(13)根据(3)至(12)中任一项的机器人装置,还包括:
189.显示器,所述显示器附接至所述外壳的表面;以及
190.控制器,所述控制器控制所述显示器的显示。
191.(14)根据(13)的机器人装置,其中,
192.所述控制器执行在所述显示器上显示广告信息的控制。
193.(15)根据(14)所述的机器人装置,其中,
194.所述控制器根据所述机器人装置的当前位置、在场的人或其他传感器信息实时切换所述广告信息。
195.(16)根据(3)至(15)中任一项的机器人装置,其中,
196.所述外壳具有使得人能够坐在由所述多条腿包围的空间中的椅子的形状。
197.(17)根据(2)的机器人装置,其中,
198.所述装载部包括驱动单元,所述驱动单元使其上放置负荷的装载平台倾斜以形成斜坡。
199.(18)根据(1)至(17)中任一项的机器人装置,其中,
200.将所述躯体部的重心布置在最大程度地缩短的所述腿中的每一条的总长度的三分之一以下。
201.(18-1)根据(18)的机器人装置,其中,
202.所述腿中的每一条均具有包括膝关节的多连杆结构,并且
203.将所述躯体部的重心布置在所述腿中的每一条的髋关节与膝关节之间的距离的三分之一以下。
204.(18-2)根据(18)的机器人装置,其中,
205.所述腿中的每一条均具有线性运动机构,并且
206.将所述躯体部的重心布置在其线性运动机构最大程度地缩短的所述腿中的每一条的总长度的三分之一以下。
207.(19)根据(1)至(18)中任一项的机器人装置,其中,
208.所述腿中的每一条均具有包括膝关节的多连杆结构,并且
209.所述躯体部的底表面被布置为高于当所述腿中的每一条的大腿连杆处于竖直向下姿势时所述膝关节。
210.参考标记列表
211.100 机器人装置
212.110 可移动腿(左前腿)
213.111 连杆(小腿连杆)
214.112 连杆(大腿连杆)
215.113 膝关节部
216.114 髋关节部
217.120 可移动腿(右前腿)
218.121 连杆(小腿连杆)
219.122 连杆(大腿连杆)
220.123 膝关节部
221.124 髋关节部
222.130 可移动腿(左后腿)
223.131 连杆(小腿连杆)
224.132 连杆(大腿连杆)
225.133 膝关节部
226.134 髋关节部
227.140 可移动腿(右后腿)
228.141 连杆(小腿连杆)
229.142 连杆(大腿连杆)
230.143 膝关节部
231.144 髋关节部
232.150 身体部
233.160 控制器
234.210 外部传感器单元
235.211l,211r 摄像装置
236.212 麦克风
237.213 触摸传感器
238.221 扬声器
239.222 显示单元
240.230 控制单元
241.231 主控制器
242.232 电池
243.233 内部传感器单元
244.233a 电池传感器
245.233b 加速度传感器
246.234 外部存储器
247.235 通信单元
248.241,242,243,244 子控制器
249.600 外壳
250.1001 上盖
251.1101 前门
252.1201 侧门
253.3010 可移动腿(左前腿)
254.3011 杆
255.3012 圆筒
256.3014 髋关节部
257.3020 可移动腿(右前腿)
258.3021 杆
259.3022 圆筒
260.3024 髋关节部
261.3030 可移动腿(左后腿)
262.3031 杆
263.3032 圆筒
264.3034 髋关节部
265.3040 可移动腿(左后腿)
266.3041 杆
267.3042 圆筒
268.3044 髋关节部
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。