1.本技术涉及桥梁工程的领域,尤其是涉及一种自动卸梁的架桥机。
背景技术:
2.在桥梁施工的过程中,经常会采用架桥机对箱梁进行架设。
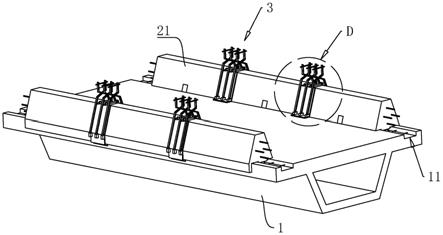
3.参照图1和图2,相关技术中,箱梁01为中间设有空心腔011的梁结构;在架桥机吊梁时,会先进行套梁,套梁就是将架桥机的连接端012与箱梁01通过螺杆013、螺母014和垫板015连接,螺杆013固定在架桥机的连接端012上,箱梁01上开有通孔,螺杆013穿过通孔伸入空心腔011内,然后与螺母014螺纹连接,垫板015位于螺母014和箱梁01内壁之间。
4.架梁时,通过卷扬机吊起箱梁01,放置于桥墩上,在落梁后,需要将螺母014拆卸,然后取走螺母014和垫板015,最后提升连接端012,抽走螺杆013;施工时,一般在箱梁01的两端各设一个套梁点016,每个套梁点016处穿设多根螺杆013;拆卸并取走螺母014和垫板015的操作,都是通过人工进行的。
5.由于架桥机无法自动卸梁,拆卸套梁所用的螺母,需要施工人员进入箱梁内作业,但现实生产中,施工箱梁高度较高,施工人员进出箱梁作业不仅效率较低,而且危险性很高。
技术实现要素:
6.为了使卸梁工作能够自动进行,本技术提供一种自动卸梁的架桥机。
7.本技术提供的一种自动卸梁的架桥机采用如下的技术方案:一种自动卸梁的架桥机,包括架桥机,所述架桥机包括主梁和若干天车,所述天车在所述主梁上运动,若干拆除装置,所述拆除装置与所述架桥机可分离设置,所述拆除装置包括运动机构和若干拆卸机构;所述运动机构包括安置板和若干滚轮,所述滚轮设置于所述安置板下,至少一个所述拆除装置上设有第一驱动件,所述第一驱动件用于驱动所述运动机构运动;一个所述拆卸机构用于拆卸一个套梁所用的螺母,所述拆卸机构包括转动组件,所述转动组件包括配合件、伸缩杆、第二驱动件和第三驱动件,所述配合件上开设有操作孔,所述操作孔的形状与套梁所用螺母的外形配合,所述操作孔的内壁用于与套梁所用螺母的周壁抵接,所述伸缩杆一端设置于所述安置板上、另一端与所述配合件固定,所述伸缩杆的伸缩方向沿靠近或远离所述安置板的方向设置,所述第二驱动件用于驱动所述伸缩杆的伸缩,所述第三驱动件用于驱动所述伸缩杆和所述配合件转动,所述配合件的转动轴线与套梁所用螺母的轴线重合。
8.通过采用上述技术方案,在施工人员套梁完毕后,先将拆卸装置放置于箱梁空心腔内,安置在套梁螺母下方,通过第二驱动件调节伸缩杆的高度,将配合件升高,套于套梁螺母的外围,将操作孔与套梁螺母对准配合,然后启动第三驱动件,第三驱动件驱动伸缩杆转动,伸缩杆带动配合件转动,配合件带动套梁螺母转动,配合件以此将套梁螺母拆卸下来;一个拆卸机构用于拆卸一个螺母,当所有套梁螺母全部拆卸完毕后,启动第二驱动件将
伸缩杆放下,此时配合件与套梁螺母分离,通过第一驱动件驱动拆除装置移动,直至离开箱梁即可;当有多个拆除装置,但仅有一个拆除装置上设有第一驱动件时,调整拆除装置的位置,将设有第一驱动件的拆除装置放置于后方,启动时,设有第一驱动件的拆除装置能够推动前方其他拆除装置一起运动,通过本技术的结构,能够使架桥机的卸梁工作自动进行,且拆除装置能够自行运动离开,降低了施工人员的工作量,同时也降低了安全隐患。
9.可选的,转动组件还包括安放座,所述安放座设置于所述安置板上,所述伸缩杆与所述安放座转动连接,所述伸缩杆相对于所述安放座的转动轴线,与所述第三驱动件驱动下的所述伸缩杆的转动轴线重合,所述第二驱动件为驱动缸且固定于所述安放座上,所述第二驱动件的活塞杆与所述配合件转动连接,所述配合件的相对于所述第二驱动件活塞杆的转动轴线,与所述第三驱动件驱动下的所述配合件的转动轴线重合。
10.通过采用上述技术方案,当第三驱动件驱动伸缩杆转动时,配合件也会随伸缩杆转动,第二驱动件的活塞杆与配合件转动连接,此时配合件的转动与高度的升降不会相互干涉,由于第二驱动件为驱动缸,而驱动缸必然会接管路,本技术的结构下,第二驱动件不会随伸缩杆转动,降低了第二驱动件的管路在转动时发生缠绕的可能性。
11.可选的,所述第三驱动件设置于所述安放座上,所述第三驱动件为电机。
12.通过采用上述技术方案,本技术通过电机驱动伸缩杆转动,电机能够持续转动,可以快速将套梁螺母拆卸下来,并且便于操作,是本技术的优选方案。
13.可选的,所述拆卸机构还包括松动组件,所述松动组件包括安装板和第四驱动件,所述安放座与所述安装板转动连接,所述安放座相对于所述安装板的转动轴线,与第三驱动件驱动下的所述配合件的转动轴线重合,所述第四驱动件为驱动缸,所述第四驱动件用于驱动所述安放座转动。
14.通过采用上述技术方案,由于拧紧的套梁螺母刚开始难以转动,因此需要先将套梁螺母旋松,然后再卸下套梁螺母;本技术设置松动组件,当需要拆卸套梁螺母时,先驱动第四驱动件推动安放座转动,安放座带动伸缩杆转动,伸缩杆带动配合件转动,配合件将套梁螺母拧松,然后再通过转动组件进行旋转拆除,之所以设置驱动缸作为第四驱动件,是因为驱动缸通常推力较大,且推动过程较为方便,因此可以快速的将套梁螺母旋松。
15.可选的,所述安置板包括固定板和两个活动板,两个所述活动板与所述固定板滑动连接,所述固定板上转动连接有双向螺杆,所述双向螺杆的两端各螺纹连接有一个所述活动板,每个所述活动板上设有至少一个所述拆卸机构。
16.通过采用上述技术方案,当需要调节两侧拆卸机构的距离,以适应不同位置的套梁螺母时,可以通过转动双向螺杆驱动两侧的活动板运动,拆卸机构随活动板的运动而运动,实现对拆卸机构位置的调整,使本技术能够适用于不同间距的套梁螺母拆卸作业。
17.可选的,所述运动机构还包括转动轴和活动杆,每个所述固定板远离活动板的一侧均设有若干所述转动轴,一个所述转动轴上滑动连接有若干所述活动杆,所述活动杆的滑动方向与所述活动板的滑动方向一致,每个所述活动杆上均设有所述滚轮,所述转动轴上设有若干顶紧件,所述顶紧件用于限制所述活动杆的滑动。
18.通过采用上述技术方案,当活动板带动拆卸机构朝两侧运动时,调节活动杆的移动程度,使活动杆也朝两侧伸出,然后通过顶紧件限位,能够使拆除装置被支撑的更加稳定,当箱梁内部的空心腔较窄时,也能够通过上述方式收回活动杆,以此减小拆除装置的横
向占用空间,便于拆除装置在箱梁内移动。
19.可选的,所述活动板靠近所述滚轮的一侧设置有若干支撑轮,所述支撑轮与所述活动板转动连接,所述支撑轮的转动轴线与所述滚轮的转动轴线平行,一个所述支撑轮与一个所述滚轮抵接。
20.通过采用上述技术方案,由于活动板上设有拆卸机构,当活动板朝外伸出后,部分板面会悬空,但活动板上的拆卸机构较重,容易将活动板下压,有导致活动板与滚轮抵碰的可能性,因此设置支撑轮,支撑轮用于与滚轮抵接,在支撑轮的支撑下,活动板被压弯的可能性降低,同时,支撑轮的转动也不会影响滚轮的转动。
21.可选的,所述拆卸机构与所述运动机构可拆卸连接。
22.通过采用上述技术方案,由于每次需要连接的拆卸机构数量不同,因此将拆卸机构与运动机构设置为可拆卸的形式,便于施工人员根据不同情况选择合适数量的拆卸机构进行安装,使本技术装置的适用范围更广。
23.可选的,还包括停存装置,所述停存装置包括活动架和停放板,所述活动架设置于所述天车上,所述停放板固定于所述活动架上,所述停放板位于正在安装的箱梁远离相邻的已安装箱梁的一侧,所述停放板用于承接所有所述拆除装置。
24.通过采用上述技术方案,当拆除装置运作完毕后,启动第一驱动件,将所有拆除装置都移动至停放板上,便可完成对拆除装置和箱梁的分离,拆除装置与停放装置间的安置和分离,实现了拆除装置与架桥机本体之间的可分离设置。
25.可选的,所述活动架包括横架和竖架,所述横架与所述天车滑动连接,所述横架相对于所述天车的滑动方向与所述天车相对于所述主梁的滑动方向一致,所述天车上设有第五驱动件,所述第五驱动件用于驱动所述横架运动,所述竖架与所述横架滑动连接,所述竖架沿竖直方向运动,所述横架上设有第六驱动件,所述第六驱动件用于驱动所述竖架运动,所述停放板一端与所述竖架固定连接、另一端转动连接有挡板,所述停放板上设有第七驱动件,所述第七驱动件用于驱动所述挡板向上翻转,所述挡板与所述竖架之间用于限制所述拆除装置。
26.通过采用上述技术方案,当所有拆除装置停放于停放板上后,通过第七驱动件驱动挡板向上翻转,翻转后的挡板与竖架将所有拆除装置限位于两者之间,降低了拆除装置从停放板下掉落的可能性;在第五驱动件的驱动下,停放板能够在靠近或远离箱梁的方向上运动,便于施工人员调节停放板的位置,当箱梁安装完毕后,提升停放板,使停放板的高度与箱梁上表面位于同一高度,然后下放挡板后,拆除装置能够从停放板上运行至箱梁上,便可进行下一次拆除装置的安装。
27.综上所述,本技术包括以下至少一种有益技术效果:1.拆除装置实现了箱梁的自动拆除,减轻了施工人员的工作量;2.松动组件用于拧松螺母,转动组件用于拆卸,两者相互配合,对套梁所用的螺母进行拆卸;3.停存装置用于在套梁所用的螺母拆卸完毕后,安置和移动拆除装置。
附图说明
28.图1是本技术相关技术的结构示意图;
图2是本技术相关技术的螺母的结构示意图;图3是本技术实施例的整体结构示意图;图4是本技术实施例的拆除装置的结构示意图;图5是本技术实施例的第一驱动件的结构示意图;图6是本技术实施例的转动组件的结构示意图;图7是本技术实施例的松动组件的结构示意图;图8是本技术实施例的设备箱的结构示意图;图9是本技术实施例的配合件与螺母的结构示意图;图10是本技术实施例的停存装置的结构示意图;图11是本技术实施例的限位板的结构示意图;图12是图11中a处的放大示意图。
29.附图标记说明:01、箱梁;011、空心腔;012、连接端;013、螺杆;014、螺母;015、垫板;016、套梁点;017、出口端;1、架桥机;11、主梁;12、支腿;13、天车;131、第五驱动件;2、拆除装置;21、运动机构;211、安置板;2111、固定板;2112、活动板;2113、双向螺杆;2114、转动螺母;2115、支撑轮;2116、设备箱;212、转动轴;2121、顶紧件;213、活动杆;214、滚轮;22、拆卸机构;221、转动组件;2211、配合件;2212、伸缩杆;2213、安放座;2214、第二驱动件;2215、第三驱动件;2216、操作孔;2217、延伸杆;2218、固定套;2219、转盘;2201、传动齿轮;2202、转动环;2203、支撑轴;2204、延长杆;2205、万向轮;222、松动组件;2221、安装板;2222、第四驱动件;23、第一驱动件;231、驱动电机;232、链轮;233、链条;3、停存装置;31、活动架;311、横架;3111、第六驱动件;312、竖架;32、停放板;321、限位板;322、挡板;323、连通孔;324、第七驱动件。
具体实施方式
30.以下结合附图1-12对本技术作进一步详细说明。
31.参照图1和图2,相关技术中,箱梁01为中间设有空心腔011的梁结构;在架桥机吊梁时,会先进行套梁,套梁就是将架桥机的连接端012与箱梁01通过螺杆013、螺母014和垫板015连接,螺杆013固定在架桥机的连接端012上,箱梁01上开有通孔,螺杆013穿过通孔伸入空心腔011内,然后与螺母014螺纹连接,垫板015位于螺母014和箱梁01内壁之间;施工时,一般在箱梁01的两端各设一个套梁点016,每个套梁点016处穿设多根螺杆013,本实施以两个套梁点016为例。
32.本技术实施例公开一种自动卸梁的架桥机。
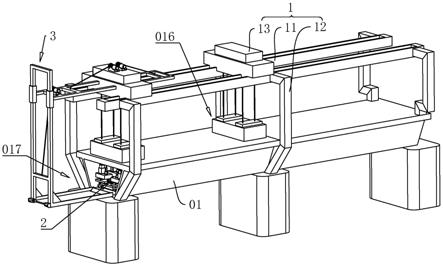
33.参照图3,一种自动卸梁的架桥机包括架桥机1、拆除装置2和停存装置3。
34.参照图3,架桥机1包括主梁11、支腿12和若干天车13,主梁11通过支腿12支撑在桥墩上,天车13在主梁11上运动,天车13的运动方向与主梁11的长度方向一致,同时,天车13的运动方向也与箱梁01的长度方向一致,天车13的数量与套梁点016的数量相同。
35.参照图4,拆除装置2包括运动机构21和若干拆卸机构22。
36.参照图4,运动机构21包括安置板211,转动轴212、活动杆213和若干滚轮214。
37.参照图4,安置板211包括固定板2111和两个活动板2112,固定板2111上焊接有燕尾块,每个活动板2112上均开有燕尾槽,燕尾槽与燕尾块配合,两个活动板2112与固定板
2111滑动连接,放置拆除装置2时,两个活动板2112的分布方向与主梁11的长度方向垂直,活动板2112的滑动方向与两个活动板2112的分布方向一致;固定板2111上通过支座与轴承转动连接有一根双向螺杆2113,双向螺杆2113的中间位置焊接有一个转动螺母2114,转动螺母2114与双向螺杆2113同轴设置,转动螺母2114便于施工人员转动双向螺杆2113,双向螺杆2113的两端各螺纹连接有一个活动板2112,每个活动板2112上可拆卸连接有两个拆卸机构22,在其他实施例中,每个活动板2112上可拆卸连接的拆卸机构22有三个或四个。
38.参照图4,固定板2111远离活动板2112的一侧焊接有两个固定座,两个固定座的分布方向与活动板2112的滑动方向垂直,每个固定座内通过轴承转动连接有一个转动轴212,转动轴212呈柱状,且转动轴212的转动轴线与转动轴212的轴线重合,转动轴212的转动轴线方向与活动板2112的滑动方向平行,每个转动轴212上滑动连接有两个活动杆213,在其他实施例中,每个转动轴212上滑动连接的活动杆213也可以为两个以上;活动杆213为方杆,活动杆213的长度方向与转动轴212的轴线方向一致,两个活动杆213的分布方向与活动杆213的长度方向一致,活动杆213的滑动方向与活动板2112的滑动方向一致;转动轴212套于活动杆213外,转动轴212的两端壁均开设有方孔,一个活动杆213插入至一个方孔内,每个活动杆213均有一端各伸出至转动轴212端部外,每个活动杆213上伸出至转动轴212外的一端焊接有滚轮214,滚轮214的转动轴线与转动轴212的轴线重合。
39.参照图5,转动轴212上设有若干顶紧件2121,顶紧件2121用于限制所述活动杆213滑动,本实施例中,顶紧件2121为螺柱,顶紧件2121与转动轴212螺纹连接,转动轴212的两端各设有一个顶紧件2121,一个顶紧件2121用于顶紧一个活动杆213;在其他实施例中,顶紧件2121为垫块,顶紧件2121通过塞入转动轴212方孔内壁与活动杆213的间隙内,实现对活动杆213运动的限制。
40.参照图5,每个活动板2112靠近滚轮214的一侧均设置有两个支撑轮2115,支撑轮2115与活动板2112通过支座与轴承转动连接,支撑轮2115的转动轴线与滚轮214的转动轴线平行,一个支撑轮2115用于与一个滚轮214抵接。
41.参照图3、图4和图5,本实施例中设有两个拆除装置2,一个拆除装置2用于拆除一个套梁点016处的螺栓,本实施例中,只有一个拆除装置2上设有第一驱动件23,第一驱动件23包括驱动电机231、链轮232和链条233,驱动电机231通过螺钉固定在固定板2111上,驱动电机231的输出端通过联轴器连接有链轮232,设有第一驱动件23的拆除装置2的一个转动轴212上同轴焊接有环状链轮232,两个链轮232通过链条233带动;当吊装箱梁01时,将正在安装的箱梁01远离相邻已安装箱梁01的一端定义为出口端017,当仅有一个拆除装置2上设有第一驱动件23时,设有第一驱动件23的拆除装置2位于远离出口端017的套梁点016处。
42.参照图5,一个拆卸机构22用于拆卸一个套梁所用的螺母014,拆卸机构22设置于运动机构21上,拆卸机构22包括转动组件221和松动组件222。
43.参照图6,转动组件221包括配合件2211、伸缩杆2212、安放座2213、第二驱动件2214和第三驱动件2215。
44.参照图6,配合件2211上开设有操作孔2216,操作孔2216的形状与套梁所用螺母014的外形配合,本实施例中,套梁所用的螺母014为六角螺母014,则操作孔2216为内六角孔,操作孔2216的内壁用于与套梁所用螺母014的周壁抵接;伸缩杆2212包括长方体柱状的延伸杆2217和方管状的固定套2218,固定套2218的内管孔为方孔,延伸杆2217在固定套
2218内管孔内滑动,固定套2218套于延伸杆2217外,延伸杆2217与固定套2218只能相对滑动,不能相对转动,配合件2211焊接于延伸杆2217远离固定套2218的一端。
45.参照图6,安放座2213为空心箱,安放座2213上设有转盘2219,转盘2219与安放座2213的一个板面通过轴承转动连接,固定套2218远离配合件2211的一端与转盘2219焊接,伸缩杆2212的伸缩方向与转盘2219的转动轴线方向一致,转盘2219远离固定套2218的板面焊接延伸柱,延伸柱上同轴焊接有齿轮,齿轮位于安放座2213内腔;第三驱动件2215为电机,第三驱动件2215的转动轴延伸至安放座2213内,第三驱动件2215的转动轴上通过连接器同轴固定有齿轮,连接于第三驱动件2215上的齿轮也伸入至安放座2213内腔,转盘2219上的齿轮与第三驱动件2215上的齿轮通过一个传动齿轮2201传动,传动齿轮2201与安放座2213内腔壁通过轴承转动连接,传动齿轮2201同时与上述两个齿轮啮合,以此实现第三驱动件2215对伸缩杆2212转动的驱动。
46.参照图6,第二驱动件2214为油缸,第二驱动件2214的缸体通过螺钉固定连接于安放座2213设有伸缩杆2212的侧壁上,第二驱动件2214的伸缩方向与伸缩杆2212的伸缩方向一致;延伸杆2217连接配合件2211的一端向内开有环槽,环槽内设有转动轴承,转动轴承外套设有转动环2202,第二驱动件2214的活塞杆与转动环2202通过连接杆连接,连接杆一端与转动环2202焊接、另一端与第二驱动件2214的活塞杆固定连接。
47.参照图7,松动组件222包括安装板2221和第四驱动件2222,安放座2213与安装板2221之间设有支撑轴2203,支撑轴2203位于安放座2213远离伸缩杆2212的侧壁上,支撑轴2203一端与安放座2213焊接、另一端与安装板2221通过轴承转动连接;安放座2213相对于安装板2221的转动轴线,与第三驱动件2215驱动下的配合件2211的转动轴线重合,支撑轴2203上焊接有延长杆2204,延长杆2204朝支撑轴2203外侧延伸;第四驱动件2222为油缸,第四驱动件2222的缸体与安装板2221铰接,第四驱动件2222的活塞杆与延长杆2204铰接,第四驱动件2222和安装板2221的铰接轴线,与第四驱动件2222活塞杆和延长杆2204之间的铰接轴线平行,第四驱动件2222的转动轴线与支撑轴2203的转动轴线平行,第四驱动件2222用于驱动安放座2213转动;安放座2213设有支撑轴2203的侧壁通过螺钉连接有万向轮2205,万向轮2205的轮体与安装板2221抵接,万向轮2205用于支撑悬空的安放座2213。
48.参照图8和图9,安装板2221与活动板2112通过螺栓可拆卸连接,固定板2111上还设置有设备箱2116,用于放置油泵、油箱、电源、传感器、接收器等设备;当拆除装置2放置于箱梁01内时,滚轮214接触箱梁01的空心腔011底壁,伸缩杆2212的伸缩方向沿竖直方向设置,伸缩杆2212带动配合件2211转动,配合件2211的转动轴线与套梁所用螺母014的轴线重合;伸缩杆2212相对于安放座2213的转动轴线,与第三驱动件2215驱动下的伸缩杆2212的转动轴线重合,配合件2211相对与第二驱动件2214活塞杆的转动轴线,与第三驱动件2215驱动下的配合件2211的转动轴线重合。
49.参照图10,停存装置3包括活动架31和停放板32。
50.参照图10,活动架31在靠近出口端017的天车13上滑动,活动架31包括横架311和竖架312;横架311为两根直杆通过连接杆相互连接形成的框架结构,横架311的长度方向沿水平放置设置,横架311相对于天车13的滑动方向,与天车13在主梁11上的滑动方向一致,天车13上设有两个第五驱动件131,第五驱动件131为卷扬机,两个第五驱动件131的绳索各与横架311的一端连接,以此实现对横架311运动的驱动和控制;竖架312为矩形框架,竖架
312与横架311滑动连接,竖架312沿竖直方向滑动,横架311上设有第六驱动件3111,第六驱动件3111为卷扬机,第六驱动件3111的绳索与竖架312连接,第六驱动件3111用于驱动竖架312运动。
51.参照图10,停放板32位于正在安装的箱梁01远离相邻的已安装箱梁01的一侧,停放板32为矩形板状,停放板32的长度方向与横架311的长度方向一致,停放板32的长度方向与运动机构21在箱梁01内的运动方向一致,停放板32长度方向的两侧均焊接有限位板321;承接拆除装置2时,停放板32上板面的高度位于箱梁01空心腔011下方,拆除装置2从箱梁01内运动出来后,停放板32用于承接拆除装置2,停放板32一端与竖架312固定连接、另一端铰接有挡板322,挡板322的铰接轴线沿水平方向设置,挡板322的铰接轴线与两个限位板321的分布方向一致,挡板322能够向上翻转。
52.参照图11和图12,停放板32内开设有连通孔323,连通孔323一端延伸至挡板322的铰接位置处,停放板32上通过螺钉固定连接有第七驱动件324,第七驱动件324为卷扬机,第七驱动件324的绳索伸入连通孔323,然后沿连通孔323伸至挡板322处与挡板322远离竖架312的一端固定,第七驱动件324用于驱动挡板322向上翻转,挡板322与竖架312之间用于限制拆除装置2,停放板32的长度能够停放所有拆除装置2。
53.本技术实施例一种自动卸梁的架桥机的实施原理为:当使用本技术的架桥机1进行架桥操作时,先调节伸缩杆2212的高度,将配合件2211套于套梁螺母014外,然后进行吊装安放箱梁01,当箱梁01安装完毕后,远程操控,启动第四驱动件2222,推动整个转动组件221运动,将套梁用的螺母014拧松,然后启动第三驱动件2215,将螺母014旋转拧下,螺母014落于配合件2211内,然后收回伸缩杆2212,垫板015落在配合件2211上,上述操作均可通过无线设备远程操作;当拆卸完毕后,启动后方拆除装置2的第一驱动件23,第一驱动件23驱动后方的拆除装置2移动,将位于前方的拆除装置2推至停放板32上,然后启动第七驱动件324将挡板322拉起,挡板322、竖架312和限位板321将拆除装置2限制在停放板32上,然后通过第五驱动件131和第六驱动件3111调节停放板32的位置,将停放板32抬升至与箱梁01上端面同一高度处,便于施工人员卸下箱梁01进行二次使用。
54.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。