1.本发明涉及一种焊接装置及使用方法,具体涉及一种可实现旋转的激光焊接装置及其焊接方法。
背景技术:
2.激光焊接是利用高能量密度的激光束作为热源的一种高效精密焊接方法,是激光材料加工技术应用的重要方法之一。激光焊接可以采用连续或脉冲激光束加以实现,激光焊接的原理可分为热传导型激光焊接和激光深熔焊接。功率密度小于104~105w/cm2为热传导焊,此时熔深浅、焊接速度慢;功率密度大于105~107w/cm2时,金属表面受热作用下凹成“孔穴”,形成深熔焊,具有焊接速度快、深宽比大的特点。其中热传导型激光焊接原理为:激光辐射加热待加工工件表面,工件表面热量通过热传导向工件内部扩散,通过控制激光脉冲的宽度、能量、峰功率和重复频率等激光参数,使工件熔化,形成特定的熔池。
3.激光深熔焊接主要涉及用于齿轮焊接和冶金薄板焊接用的激光焊接机;激光深熔焊接一般采用连续激光光束完成材料的连接,其冶金物理过程与电子束焊接极为相似,即能量转换机制是通过“小孔”(key-hole)结构来完成的。在足够高的功率密度激光照射下,材料产生蒸发并形成小孔。这个充满蒸气的小孔犹如一个黑体,几乎吸收全部的入射光束能量,孔腔内平衡温度达2500℃左右,热量从这个高温孔腔外壁传递出来,使包围着这个孔腔四周的金属熔化。小孔内充满在光束照射下壁体材料连续蒸发产生的高温蒸汽,小孔四壁包围着熔融金属,液态金属四周包围着固体材料(而在大多数常规焊接过程和激光传导焊接中,能量首先沉积于工件表面,然后靠传递输送到工件内部)。孔壁外液体流动和壁层表面张力与孔腔内连续产生的蒸汽压力相持并保持着动态平衡。光束不断进入小孔,小孔外的材料在连续流动,随着光束移动,小孔始终处于流动的稳定状态。也就是说,小孔和围着孔壁的熔融金属,随着前导光束的前进速度向前移动,熔融金属充填着小孔移开后留下的空隙并随之冷凝,于是形成焊缝。上述过程发生的很快,进而使焊接速度很容易达到每分钟数米。
4.罩轮毂作为房车等重载车型变速机的重要组成部分,其每个焊接位置的焊接质量对房车整体的使用性能有着重要的作用,其焊缝通常为圆弧曲线而非直线,焊接过程中需要采用边旋转边焊接的方式,故其焊接存在一定的难度。传统的罩轮毂焊接一般采用二保焊和氩弧焊,但二保焊在焊接过程中存在飞溅较大、烟尘污染严重、焊接变形量大等问题;氩弧焊也存在操作要求高、生产效率低的问题,且两者均不易实现自动化控制,这些问题给罩轮毂的批量自动化生产带来了严重的不利影响。
技术实现要素:
5.本发明的目的是解决传统的焊接工件采用二保焊时,焊接飞溅较大、烟尘污染严重且焊接变形量大,而采用氩弧焊时,操作要求高且生产效率低,且两种焊接方法均难以实现焊接工件批量自动化生产的技术问题,而提供一种可实现旋转的激光焊接装置及其焊接
方法,有效解决焊接工件及其组件在焊接中的问题,尤其是有效解决罩轮毂在焊接中的问题。
6.为解决上述技术问题,本发明所采用的技术方案为:
7.一种可实现旋转的激光焊接装置,其特殊之处在于:包括三轴运动机构、焊接机构和光学焊接头;
8.三轴运动机构包括底座、设置在底座上的滑动架、设置在滑动架上且用于驱动滑动架沿y轴方向移动的第一驱动单元以及设置在滑动架上的滑动板、固定安装在滑动板的转接机构、设置在转接机构上且用于驱动滑动板沿x轴方向移动的第二驱动单元;
9.转接机构包括连接板、滚珠丝杠、设置在滚珠丝杠上的上下滑块、第二驱动电机以及固定设置在连接板两端的两个限位块;
10.滚珠丝杠穿过两个限位块,其一端与第二驱动电机的输出连接,第二驱动电机驱动滚珠丝杠带动上下滑块在两个限位块之间移动;
11.光学焊接头设置在上下滑块上,第二驱动电机通过上下滑块带动光学焊接头沿z轴方向移动;
12.焊接机构设置在底座上且位于光学焊接头的下方,其包括从下至上依次连接的转台、四爪卡盘和定位工装,以及一个设置在底座上且驱动转台的第一驱动电机,转台设置在底座上,四爪卡盘的卡爪用于夹持定位工装;
13.滑动架与底座上之间设置有第一滑动组件,滑动板与滑动架之间设置有第二滑动组件。
14.进一步地,所述滑动架包括设置在底座上的两个立梁、与两个立梁上端分别固连的横梁;
15.第一滑动组件包括设置在底座两侧的一对第一滑轨以及分别设置在两个立梁下端的一对第一滑槽;
16.第一滑轨与第一滑槽相适配;
17.第二滑动组件包括设置在横梁上的一对第二滑轨以及分别设置在滑动板下且与一对第二滑轨相适配的一对第二滑槽。
18.进一步地,所述第一驱动单元和第二驱动单元结构相同,均包括驱动电机、齿条、与齿条相啮合的齿轮及由齿形带、与齿形带相适配的主动带轮、从动带轮组成的传动结构;
19.第一驱动单元的齿条为两个,分别设置在底座的两个侧壁上;
20.第一驱动单元的驱动电机为两个,分别固定设置在两个立梁上,其输出端分别与主动带轮连接;从动带轮与齿轮通过轴承同轴设置在立梁上;第一驱动单元的驱动电机通过传动结构带动立梁沿y轴方向滑动;
21.第二驱动单元的齿条为两个,分别设置在横梁上的一对第二滑轨之间;
22.第二驱动单元的驱动电机设置在连接板上,其输出端与第二驱动单元的主动带轮连接,从动带轮与齿轮通过轴承同轴设置在滑动板上;第二驱动单元的齿轮与横梁上的齿条啮合;第二驱动单元的驱动电机通过传动结构带动滑动板沿x轴方向滑动。
23.进一步地,所述光学焊接头的压缩空气气嘴和氩气保护气嘴分别设置在其两侧;
24.光学焊接头的压缩空气气嘴和氩气保护气嘴均用于连接外部气源;
25.光学焊接头的旋钮设置在光学焊接头的正面侧壁上,用于调节光学焊接头输出光
斑的大小;
26.光学焊接头的下方设置有遮光板,遮光板沿光学焊接头的输出光路设置,其上设置有过光孔,用于光学焊接头的输出激光通过;光学焊接头用于安装光纤。
27.进一步地,所述第一驱动电机、第二驱动电机、第一驱动单元和第二驱动单元的驱动电机均为伺服电机。
28.进一步地,还包括控制模块;控制模块分别与第一驱动电机、第二驱动电机、第一驱动单元和第二驱动单元的驱动电机、压缩空气气嘴与氩气保护气嘴的控制装置电连接。
29.另外,本发明还提供一种可实现旋转的激光焊接方法,其特征在于,包括以下步骤:
30.步骤1:焊接前准备
31.1.1)根据焊接工件的规格确定焊接深度及位置;
32.1.2)对焊接工件的焊接部位进行清洁;
33.步骤2:调试
34.2.1)将定位工装装夹于四爪卡盘上,然后将焊接工件进行定位;
35.2.2)调整焊接机构的位置、压缩空气及氩气气源;
36.2.3)连接控制模块;
37.2.4)设置焊接参数;
38.步骤3:焊接
39.按压控制模块的开始按钮,开始焊接;
40.步骤4:焊接质量检查,确定质量无异后,执行步骤5;
41.步骤5:重复步骤3和步骤4进行连续焊接,直至将所有焊接工件完成。
42.进一步地,步骤1中,焊接工件为罩轮毂;
43.步骤1.1)中,根据焊接工件的规格确定焊接深度具体为:
44.罩轮毂及其组件的厚度为2mm时,焊接深度为1.5-2mm;
45.罩轮毂及其组件的厚度为3mm时,焊接深度为2.5-3mm。
46.进一步地,步骤2.1)具体为:用百分表测试并调整四爪卡盘,使定位工装的端面圆跳动小于0.05mm,将擦拭干净的待焊接罩轮毂及其组件套装进定位工装。由于罩轮毂及其组件的焊缝只有0.1mm的间隙,定位工装的圆跳动小于0.05mm,这样可以保证罩轮毂及其组件在旋转过程中,使光学焊接头的光斑中心和焊缝中心保持完全重合,进而保证了焊接熔深和精确度。
47.进一步地,步骤2.2)中的气源为压缩空气气源和氩气气源,步骤2.2)具体为:
48.2.2.1)调整光学焊接头上的旋钮,将光学焊接头的圆形输出光斑直径调整为2.5mm;光斑调整在2.5mm是为了结合光纤的输出功率来调整功率密度,进一步满足熔深要求,避免罩轮毂及其组件被焊穿或者熔深不够;
49.2.2.2)调整压缩空气气源,确保其干燥且压力大于0.2mp;压缩空气压力大于0.2mpa可以在焊接过程中有效的保护光学焊接头的前端保护镜片,压力太小焊接时飞溅容易烧伤前端保护镜片;
50.2.2.3调整三轴运动机构,将光学焊接头移动至起始焊接位置,并调节遮光板的下沿与待焊接工件需焊接位置的高度,两者的高度差为132mm-133mm;焊接工作距离调整到
132mm-133mm是为了有足够的离焦量,同时也避免飞溅烧伤前端保护镜片;
51.2.2.4)调整氩气气源的流量为18-20l/min,并保证氩气保护气嘴正对光斑位置,且氩气保护气嘴与光斑的高度距离为15-20mm;氩气流量18-20l/min,并且正对光斑高度为15-20mm,可以在焊接过程中更好的保护熔池,使罩轮毂焊接后焊缝更加平滑均匀,压力太大会使熔池在焊接过程中波动太大,罩轮毂焊后焊道表面褶皱不平,压力太小或者位置不对会使罩轮毂的焊道表面氧化,造渣加剧,焊后表面焊渣严重且焊道内部容易产生气孔及夹杂的缺陷。
52.2.2.5)调节转台的速度为10r/min。转台速度为10r/min提供了合适的焊接速度,是为了在合适的激光功率输出下,更好的满足罩轮毂的熔深和表面要求,速度过快会出现熔深不够或者焊接气孔,过慢会出现熔深过深或者热影响区过大,变形量加大的缺陷。
53.与现有技术相比,本发明技术方案的有益效果是:
54.本发明一种可实现旋转的激光焊接装置及其焊接方法,采用激光作为焊接热源,能耗低且污染很小,极大的减少了能耗且焊接过程无烟尘飞溅等,真正实现了环保生产;激光焊接的过程是快热快冷的过程,因此给焊接工件及其组件本身带来的热影响很小,所以焊接工件及其组件的变形量就很小,极大的保证了焊接工件及其组件的公差精度;焊接工件及其组件被焊接的表面平整光滑美观且无需二次加工,可直接进行装配;尤其是罩轮毂,在整个出光焊接过程控制中,完成一个罩轮毂及其组件的焊接可控制在6-7s,耗时短、效率高且操作方便,很容易实现自动化焊接;从而有效的解决了罩轮毂及其组件在焊接中的问题。
附图说明
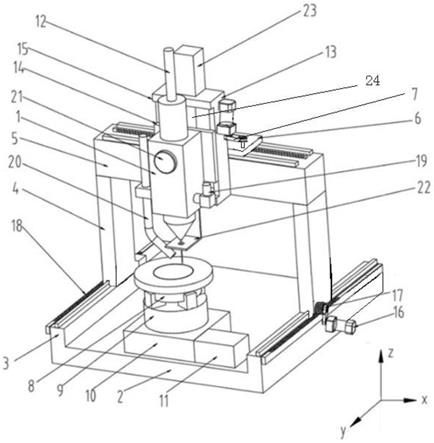
55.图1为本发明一种可实现旋转的激光焊接装置实施例的结构示意图;
56.图中附图标记为:
57.1-光学焊接头,2-底座,3-底梁,4-立梁,5-横梁,6-滑动板,7-齿形带,8-定位工装,9-四爪卡盘,10-转台,11-第一驱动电机,12-光纤,13-连接板,14-上下滑块,15-限位块,16-驱动电机,17-齿轮,18-齿条,19-压缩空气气嘴,20-氩气保护气嘴,21-旋钮,22-遮光板,23-第二驱动电机,24-滚珠丝杠。
具体实施方式
58.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明技的术方案,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
59.如图1所示,一种可实现旋转的激光焊接装置,包括三轴运动机构、焊接机构和光学焊接头1;三轴运动机构包括底座2、设置在底座2上的滑动架、设置在滑动架上且用于驱动滑动架沿y轴方向移动的第一驱动单元以及设置在滑动架上的滑动板6、固定安装在滑动板6的转接机构、设置在转接机构上且用于驱动滑动板6沿x轴方向移动的第二驱动单元;滑动架包括设置在底座2上的两个立梁4、与两个立梁4上端分别固连的横梁5;
60.其中,转接机构包括连接板13、滚珠丝杠24、设置在滚珠丝杠24上的上下滑块14、
第二驱动电机23以及固定设置在连接板13两端的两个限位块15;滚珠丝杠24穿过两个限位块15,其一端与第二驱动电机23的输出连接,第二驱动电机23驱动滚珠丝杠24带动上下滑块14在两个限位块15之间移动;光学焊接头1设置在上下滑块14上,第二驱动电机23通过上下滑块14带动光学焊接头1沿z轴方向移动;
61.焊接机构设置在底座2上且位于光学焊接头1的下方,其包括从下至上依次连接的转台10、四爪卡盘9和定位工装8,以及一个设置在底座2上且驱动转台10的第一驱动电机11,转台10设置在底座2上,四爪卡盘9的卡爪用于夹持定位工装8;
62.另外,滑动架与底座2上之间设置有第一滑动组件,滑动板6与滑动架之间设置有第二滑动组件。第一滑动组件包括设置在底座2两侧的一对第一滑轨以及分别设置在两个立梁4下端的一对第一滑槽;第一滑轨与第一滑槽相适配;
63.第二滑动组件包括设置在横梁5上的一对第二滑轨以及分别设置在滑动板6下且与一对第二滑轨相适配的一对第二滑槽。
64.本实施实施例中,第一驱动单元和第二驱动单元结构相同,均包括驱动电机16、齿条18、与齿条18相啮合的齿轮17及由齿形带7、与齿形带7相适配的主动带轮、从动带轮组成的传动结构;第一驱动电机11、第二驱动电机23、第一驱动单元和第二驱动单元的驱动电机16均为伺服电机。
65.第一驱动单元的齿条18为两个,分别设置在底座2的两个侧壁上;第一驱动单元的驱动电机16为两个,分别固定设置在两个立梁4上,其输出端分别与主动带轮连接;从动带轮与齿轮17通过轴承同轴设置在立梁4上;第一驱动单元的驱动电机16通过传动结构带动立梁4沿y轴方向滑动;
66.第二驱动单元的齿条18为两个,分别设置在横梁5上的一对第二滑轨之间;第二驱动单元的驱动电机16设置在连接板13上,其输出端与第二驱动单元的主动带轮连接,从动带轮与齿轮17通过轴承同轴设置在滑动板6上;第二驱动单元的齿轮17与横梁5上的齿条18啮合;第二驱动单元的驱动电机16通过传动结构带动滑动板6沿x轴方向滑动。
67.为了进一步说明,本实施例中,在底座2的两个侧壁上,还可以设置两个底梁3,两个底梁3可以与底座2一体制成,两个底梁3的外侧分别设置有第一驱动单元的两个齿条18,两个底梁3上分别设置有一对第一滑轨;两个立梁4的下端分别设置有一对第一滑槽,分别在两个立梁4上设置两个驱动电机16,第一驱动单元的两个从动带轮的中心轴分别穿过两个立梁4上的轴承(其中,轴承与从动带轮同轴设置),并与对应的齿轮17同轴连接,第一驱动单元的两个驱动电机16输出端与其两个主动带轮分别连接;主动带轮通过齿形带7转动两个从动带轮,进而使得两个立梁4分别沿两个底梁3上的一对第一滑轨运动(即带动两个立梁4沿y轴方向移动)。
68.四爪卡盘9与定位工装8相配合,四爪卡盘9就是用来装夹并调整定位工装8的端面圆跳动小于0.05mm;定位工装8用于装夹焊接工件,其可以直接夹装在四爪卡盘9上,目的是为了实现不同工件的快速上下装夹与定位,并确保焊接作业的连续性和稳定性,同时提高焊接位置的精确度;四爪卡盘9和转台10通过4个安装孔机械连接在一起,四爪卡盘9的方向是垂直向上,也就是沿z轴正方向上;转台10和第一驱动电机11是通过固定安装孔机械连接,其中第一驱动电机11是l型伺服电机,目的是实现转台10转速的大跨度和高精度的均匀转动。
69.光学焊接头1用于安装光纤12;三轴运动机构带动光学焊接头1实现对焊接工件的焊接。
70.本实施例中,焊接工件为罩轮毂及其组件,并且光学焊接头1的压缩空气气嘴19和氩气保护气嘴20分别设置于光学焊接头1的两侧,压缩空气气嘴19为了保护光学焊接头1前端的光学镜片,氩气保护气嘴20的目的是为了实现焊接过程中对熔池的保护,隔绝空气减少焊接缺陷和杂质并减少飞溅和烟尘;压缩空气气嘴19和氩气保护气嘴20均通过空气软管和外界气源连接,压缩空气气嘴19连接空压机,氩气保护气嘴20连接氩气罐。
71.光学焊接头1上还安装有光纤12与遮光板22;光学焊接头1的旋钮21设置在光学焊接头1的正面侧壁上,用于调节光学焊接头1输出光斑的大小;遮光板22沿光学焊接头1的输出光路设置,遮光板22上设置有过光孔,用于光学焊接头1的输出光穿过;遮光板22的作用就是避免焊接过程中,焊接的反射光入射至光学焊接头1内部的光学镜片和腔体中,对光学镜片和腔体造成损伤,进而会影响光源形成的光斑质量。
72.最后的控制模块里面集成了光纤12的控制线信号、第一驱动电机11、第二驱动电机23、第一驱动单元的驱动电机16、第二驱动单元的驱动电机16以及压缩空气气嘴19与氩气保护气嘴20的控制装置电连接,从而可以通过程序实现控制光纤12打开或关闭激光;另外控制模块里面还集成了压缩空气气嘴19和氩气保护气嘴20的电磁阀信号,控制压缩空气气嘴19和氩气保护气嘴20的电磁阀开启或停止,来实现两种气体的通或断;本实施例中,第一驱动电机11、第二驱动电机23、第一驱动单元和第二驱动单元的驱动电机16均为伺服电机,其各自信号都是统一接入控制模块中,来实现三轴运动机构带动光学焊接头1在x、y、z三个方向上的移动和速度,并控制多个伺服电机的启动、停止和转动速度。
73.另外,本发明还提供了一种可实现旋转的激光焊接方法,其特征在于,包括以下步骤:
74.步骤1:焊接前准备
75.1.1)根据焊接工件的规格确定焊接深度及位置;
76.根据焊接工件的规格确定焊接深度具体为:
77.当罩轮毂及其组件的厚度为2mm时,要求焊接深度为1.5-2mm;
78.当罩轮毂及其组件的厚度为3mm时,要求焊接深度为2.5-3mm。
79.1.2)对焊接工件的焊接部位进行清洁;
80.步骤2:调试
81.2.1)将定位工装8装夹于四爪卡盘9上,然后将焊接工件进行定位;
82.用百分表测试并调整四爪卡盘9,使定位工装8的端面圆跳动小于0.05mm,将擦拭干净的待焊接罩轮毂及其组件套装进定位工装8。
83.2.2)调整焊接机构的位置、压缩空气及氩气气源;本实施例中的气源为压缩空气气源和氩气气源;
84.2.2.1)调整光学焊接头1上的旋钮21,将光学焊接头1的圆形输出光斑直径调整为2.5mm;
85.2.2.2)调整压缩空气气源,确保其干燥且压力大于0.2mp;
86.2.2.3调整三轴运动机构,将光学焊接头1移动至起始焊接位置,并调节遮光板21的下沿与待焊接工件需焊接位置的高度,两者的高度差为132mm-133mm;
87.2.2.4)调整氩气气源的流量为18-20l/min,并保证氩气保护气嘴20正对光斑位置,且氩气保护气嘴20与光斑的高度距离为15-20mm;
88.2.2.5)调节转台10的速度为10r/min。
89.2.3)连接控制模块;
90.2.4)设置焊接参数;
91.步骤3:焊接
92.按压控制模块的开始按钮,开始焊接;
93.步骤4:焊接质量检查,确定质量无异后,执行步骤5;
94.步骤5:重复步骤3和步骤4进行连续焊接,直至将所有焊接工件焊接完成。
95.本实施例中的待焊接工件为罩轮毂及其组件,为了进一步说明可实现旋转的激光焊接方法,本实施例举例说明如下:
96.1)焊接前准备:
97.确定罩轮毂及其组件需要焊接位置及规格,并用工业酒精擦拭、清洗轮毂及其组件的焊接部位内外两侧。
98.轮毂及其组件的具体规格目前分为三种:
99.1、待焊接轮毂及其组件的厚度2mm时,其焊接深度要求1.5-2mm;
100.2、待焊接轮毂及其组件的厚度3mm,焊接深度要求1.5-2mm;3、待焊接轮毂及其组件的厚度3mm,焊接深度要求2.5-3mm;
101.2)调试焊接机构
102.将定位工装8装夹于四爪卡盘9上,用百分表测试并调整四爪卡盘9使定位工装8在转动过程中端面圆跳动<0.05mm,将擦拭干净的罩轮毂及其组件套装进定位工装8中。
103.调整光学焊接头1上的旋钮21,将光学焊接头1的圆形光斑直径调整为2-2.5mm,调整压缩空气气嘴19,确保其干燥且压力>0.2mp,调整三轴运动机构,将光学焊接头1移动至起始焊接位置,并调节焊接头遮光板22的下沿与罩轮毂需焊接位置高度距离差至133mm,调整氩气或保护气体流量至20l/min,并保证氩气保护气嘴20正对光斑位置且高度距离20mm。
104.通过控制模块实现激光的输出功率和光学焊接头1运动路径可控,且装取罩轮毂及其组件后可连续自动焊接。并调节转台10速度至10r/min,根据不同规格罩轮毂及其组件调节光纤12的输出功率,其输出功率一般为1800w、2200w及2800w;
105.3)出光焊接
106.按压控制模块的开始按钮,佩戴防护眼镜观察出光焊接。
107.4)焊接质量检查
108.焊接轮毂及其组件一圈结束后,控制光学焊接头1抬高至设定高度,拿取工件,检查焊接部位质量,确保焊接部位焊道光滑,平整,均匀,无夹杂气孔裂纹等缺陷。
109.5)连续焊接
110.确定质量无异后放入成品区,再拿取相同规格的罩轮毂,套装至定位工装8,重复步骤3)和步骤4),进而实现连续焊接,直至所有待焊接的罩轮毂及其组件的焊接完成。
111.另外,本发明还提供了一种可实现旋转的激光焊接方法,其特征在于,包括以下步骤:
112.步骤1:焊接前准备
113.1.1)根据焊接工件的规格确定焊接深度及位置;
114.根据焊接工件的规格确定焊接深度具体为:
115.当罩轮毂及其组件的厚度为2mm时,焊接深度为1.5-2mm;
116.当罩轮毂及其组件的厚度为3mm时,焊接深度为2.5-3mm。
117.1.2)对焊接工件的焊接部位进行清洁;
118.步骤2:调试
119.2.1)将定位工装装夹于四爪卡盘上,然后将焊接工件进行定位;
120.用百分表测试并调整四爪卡盘,使定位工装的端面圆跳动小于0.05mm,将擦拭干净的待焊接罩轮毂及其组件套装进定位工装。
121.2.2)调整焊接机构的位置、压缩空气及氩气气源;本实施例中的气源为压缩空气气源和氩气气源;
122.2.2.1)调整光学焊接头上的旋钮,将光学焊接头的圆形输出光斑直径调整为2.5mm;光斑调整在2.5mm是为了结合光纤12的输出功率来调整功率密度,进一步满足熔深要求,避免罩轮毂及其组件被焊穿或者熔深不够。
123.2.2.2)调整压缩空气气源,确保其干燥且压力大于0.2mp;压缩空气的压力大于0.2mpa可以在焊接过程中有效的保护光学焊接头1的前端保护镜片,压力太小焊接时飞溅容易烧伤前端保护镜片。
124.2.2.3调整三轴运动机构,将光学焊接头移动至起始焊接位置,并调节遮光板的下沿与待焊接工件需焊接位置的高度,两者的高度差为132mm-133mm;焊接工作距离调整到132mm-133mm是为了有足够的离焦量,同时也避免飞溅烧伤前端保护镜片。
125.2.2.4)调整氩气气源的流量为18-20l/min,并保证氩气保护气嘴正对光斑位置,且氩气保护气嘴与光斑的高度距离为15-20mm;氩气流量18-20l/min,并且正对光斑高度为15-20mm,可以在焊接过程中更好的保护熔池,使罩轮毂焊接后焊缝更加平滑均匀,压力太大会使熔池在焊接过程中波动太大,罩轮毂焊后焊道表面褶皱不平,压力太小或者位置不对会使罩轮毂的焊道表面氧化,造渣加剧,焊后表面焊渣严重且焊道内部容易产生气孔及夹杂的缺陷。
126.2.2.5)调节转台10的速度为10r/min。转台10速度为10r/min提供了合适的焊接速度,是为了在合适的激光功率输出下,更好的满足罩轮毂的熔深和表面要求,速度过快会出现熔深不够或者焊接气孔,过慢会出现熔深过深或者热影响区过大,变形量加大的缺陷。
127.2.3)连接控制模块;
128.2.4)设置焊接参数;
129.步骤3:焊接
130.按压控制模块的开始按钮,开始焊接;
131.步骤4:焊接质量检查,确定质量无异后,执行步骤5;
132.步骤5:重复步骤3和步骤4进行连续焊接,直至将所有焊缝焊接完成。
133.本实施例中的待焊接工件为罩轮毂及其组件,为了进一步说明可实现旋转的激光焊接方法,本实施例举例说明如下:
134.1)焊接前准备:
135.确定罩轮毂及其组件需要焊接位置及规格,并用工业酒精擦拭、清洗轮毂及其组
件的焊接部位内外两侧。
136.轮毂及其组件的具体规格目前分为三种:
137.1、待焊接轮毂及其组件的厚度2mm时,其焊接深度要求1.5-2mm;
138.2、待焊接轮毂及其组件的厚度3mm,焊接深度要求1.5-2mm;3、待焊接轮毂及其组件的厚度3mm,焊接深度要求2.5-3mm;
139.2)调试焊接机构
140.将定位工装8装夹于四爪卡盘9上,用百分表测试并调整四爪卡盘9使定位工装8在转动过程中端面圆跳动<0.05mm,将擦拭干净的罩轮毂及其组件套装进定位工装8中。
141.调整光学焊接头1上的旋钮21,将光学焊接头1的圆形光斑直径调整为2.5mm,调整压缩空气气嘴19,确保其干燥且压力>0.2mp,调整三轴运动机构,将光学焊接头1移动至起始焊接位置,并调节焊接头遮光板22的下沿与罩轮毂需焊接位置高度距离差至133mm,调整氩气或保护气体流量至20l/min,并保证氩气保护气嘴20正对光斑位置且高度距离20mm。
142.通过控制模块实现激光的输出功率和光学焊接头1运动路径可控,且装取罩轮毂及其组件后可连续自动焊接。并调节转台10速度至10r/min,根据不同规格罩轮毂及其组件调节光纤12的输出功率,其输出功率一般为1800w、2200w及2800w;
143.6)出光焊接
144.按压控制模块的开始按钮,佩戴防护眼镜观察出光焊接。
145.7)焊接质量检查
146.焊接轮毂及其组件一圈结束后,控制光学焊接头1抬高至设定高度,拿取工件,检查焊接部位质量,确保焊接部位焊道光滑,平整,均匀,无夹杂气孔裂纹等缺陷。
147.8)连续焊接
148.确定质量无异后放入成品区,再拿取相同规格的罩轮毂,套装至定位工装8,重复步骤3)和步骤4),进而实现连续焊接,直至所有待焊接的罩轮毂及其组件焊接完成。
149.以上所述仅为本发明的实施例,并非对本发明保护范围的限制,凡是利用本发明说明书以及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
