1.本技术涉及吸盘装置的领域,尤其是涉及一种机械手用电动吸盘装置。
背景技术:
2.众所周知,吸盘上下料机械手是一种用于辅助工作人员对材料进行上下料操作,以便有效降低操作人员劳动强度,提高生产效率,避免安全隐患的辅助装置,其在上下料机械手领域中得到广泛的使用。
3.然而,当工件被吸附到吸盘上的时候,受惯性影响工件会继续向上移动对吸盘进行推压,从而造成工件与吸盘本体接触后发生相互挤压的情况,容易造成工件的损坏。
技术实现要素:
4.为了减少吸取工件时工件发生损坏的情况,本技术提供一种机械手用电动吸盘装置。
5.本技术提供的一种机械手用电动吸盘装置,采用如下的技术方案:
6.一种机械手用电动吸盘装置,包括用于与机械手臂连接的固定板,所述固定板连接有安装板,所述安装板的底部设有吸盘本体,所述吸盘本体通过缓冲组件与安装板连接。
7.通过采用上述技术方案,在吸取工件时,吸盘本体产生吸力,工件吸到吸盘本体上后受到惯性会对吸盘本体进行推压,通过缓冲组件的设置,可以对吸盘本体进行缓冲,从而减小工件与吸盘本体之间的相互挤压,进而减小工件和吸盘本体受损的可能性,提高吸盘本体的使用寿命。
8.可选的,所述缓冲组件包括缓冲销和卡头,所述缓冲销设于吸盘本体上,所述缓冲销穿过安装板且与安装板滑移连接,所述缓冲销远离吸盘本体的一端与卡头固定连接。
9.通过采用上述技术方案,使得吸盘本体具有浮动的效果,能够对吸取上来的工件进行缓冲,减少工件与吸盘本体接触后发生相互挤压的情况,从而减小工件和吸盘本体发生损坏的可能性。
10.可选的,所述缓冲销的外侧套设有弹性件,所述弹性件设于安装板与吸盘本体之间。
11.通过采用上述技术方案,弹性件能够对吸盘本体进一步进行缓冲,减少吸盘本体向上移动后与安装板发生碰撞的情况,从而减小吸盘本体发生损坏的可能性。
12.可选的,所述吸盘本体为电磁吸盘。
13.通过采用上述技术方案,当工件为铁制品时,通过对吸盘本体进行通电,吸盘本体充磁,充磁后的吸盘本体靠近工件时,即可将工件吸取上来;通过对吸盘本体进行断电,吸盘本体消磁,消磁后的吸盘本体失去磁性,工件可从电磁吸盘处掉落。此外,当吸盘本体消磁后,吸附于吸盘本体上的铁屑也能掉落下来,便于吸盘本体的清理。
14.可选的,所述安装板的底端设有第一爪夹和第二爪夹,所述第一爪夹和第二爪夹设于吸盘本体的两侧,所述安装板上设有第一驱动件,所述第一驱动件的输出端与第一爪
夹固定连接。
15.通过采用上述技术方案,当目标工件被吸取到吸盘本体上的时候,第一驱动件启动,带动第一爪夹朝向第二爪夹移动,直至第一爪夹和第二爪夹分别与工件的两侧抵接,可以减小工件从吸盘本体上掉落下来的可能性。
16.可选的,所述安装板上设有第二驱动件,所述第二驱动件的输出端与第二爪夹固定连接。
17.通过采用上述技术方案,当目标工件被吸取到吸盘本体上的时候,第二驱动件启动,带动第二爪夹朝向第一爪夹移动,直至第一爪夹和第二爪夹分别与工件的两侧抵接,可以减小工件从吸盘本体上掉落下来的可能性。
18.可选的,所述固定板上设有驱动安装板旋转的驱动机构,所述驱动机构与安装板连接。
19.通过采用上述技术方案,驱动机构启动可以带动安装板在水平方向上进行旋转,安装板带动吸盘本体在水平方向上进行旋转,实现了吸盘本体在水平方向上进行角度调节的目的,从而便于工件的吸取和运输。
20.可选的,所述驱动机构包括旋转电机和回转减速器,所述旋转电机和回转减速器设于固定板上,所述旋转电机的输出端与回转减速器的输入端固定连接,所述回转减速器的输出端与安装板固定连接。
21.通过采用上述技术方案,回转减速器与旋转电机连接能够有效地降低旋转电机的转速,便于对吸盘本体在水平方向上的角度进行调节,除此之外,还能够增加旋转电机的转矩,从而便于带动安装板进行旋转。
22.综上所述,本技术包括以下至少一种有益技术效果:
23.通过缓冲组件的设置,可以对吸盘本体进行缓冲,减少工件与吸盘本体接触后发生相互挤压的情况,从而减小工件和吸盘本体发生损坏的可能性;
24.通过弹性件的设置,能够对吸盘本体进一步进行缓冲,减少吸盘本体向上移动后与安装板发生碰撞的情况,从而减小吸盘本体发生损坏的可能性;
25.通过第一爪夹和第二爪夹的设置,可以减小工件从吸盘本体上掉落下来的可能性,一方面减少工件受损的情况发生,另一方面减少工件掉落造成的安全隐患。
附图说明
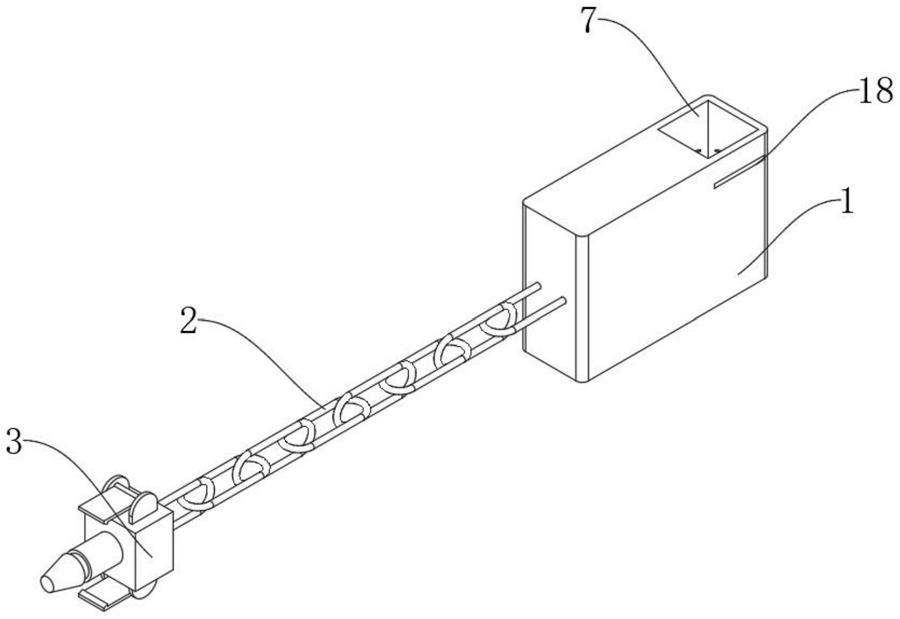
26.图1是本技术实施例的整体结构示意图。
27.图2是体现本技术实施例中第一滑轨和第二滑轨的结构示意图。
28.附图标记说明:1、固定板;11、法兰盖;2、吸盘本体;21、缓冲组件;211、缓冲销;212、卡头;213、弹性件;3、驱动机构;31、旋转电机;32、回转减速器;4、安装板;41、第一滑轨;411、第一滑块;4111、第一爪夹;42、第二滑轨;421、第二滑块;4211、第二爪夹;43、第一驱动件;44、第二驱动件;5、工件。
具体实施方式
29.以下结合附图1-2,对本技术作进一步详细说明。
30.本技术实施例公开一种机械手用电动吸盘装置。参照图1,一种机械手用电动吸盘
装置,包括固定板1,固定板1的一端与机械手臂固定连接,另一端连接有吸盘本体2。通过机械手臂带动固定板1在水平方向和竖直方向上进行移动,从而实现吸盘本体2在水平方向和竖直方向上的移动,进而便于吸盘本体2对工件5进行吸取和运输。
31.参照图1,固定板1上设有驱动吸盘本体2旋转的驱动机构3,所述驱动机构3包括旋转电机31和回转减速器32,回转减速器32固定连接于固定板1远离机械手臂的一端,固定板1上通过螺栓固定连接有法兰盖11,旋转电机31竖直设置且固定安装于法兰盖11上,旋转电机31的输出端与回转减速器32的输入端同轴固定,回转减速器32的输出端固定连接有安装板4,吸盘本体2与安装板4连接。
32.通过启动旋转电机31带动安装板4在水平方向上进行旋转,安装板4带动吸盘本体2在水平方向上进行旋转,从而实现了吸盘本体2在水平方向上的角度调节,便于工件5的吸取和运输;回转减速器32与旋转电机31连接能够有效地降低旋转电机31的转速,便于对吸盘本体2在水平方向上的角度进行调节,除此之外,还能够增加旋转电机31的转矩,从而便于带动安装板4进行旋转。
33.参照图1,吸盘本体2上设有缓冲组件21,所述缓冲组件21包括缓冲销211和卡头212,缓冲销211固定连接与吸盘本体2上,缓冲销211穿过安装板4且与安装板4滑移连接,缓冲销211远离吸盘本体2的一端与卡头212固定连接。当工件5被吸附到吸盘本体2后的时候,受惯性影响会继续向上移动,从而推动吸盘本体2向上移动,通过缓冲销211的设置,使得吸盘本体2具有浮动的效果,能够对吸取上来的工件5进行缓冲,减少工件5与吸盘本体2接触后发生相互挤压的情况,从而减小工件5和吸盘本体2发生损坏的可能性。
34.参照图1和图2,缓冲销211的外侧套设有弹性件213,弹性件213位于安装板4与吸盘本体2之间。当工件5被吸附到吸盘本体2后的时候,受惯性影响会继续向上移动,从而推动吸盘本体2向上移动,而弹性件213能够对吸盘本体2进一步进行缓冲,减少吸盘本体2向上移动后与安装板4发生碰撞的情况,从而减小吸盘本体2发生损坏的可能性。本实施例中,弹性件213可以是压簧。
35.参照图1,吸盘本体2为电磁吸盘,当工件5为铁制品时,通过对吸盘本体2进行通电,吸盘本体2充磁,充磁后的吸盘本体2靠近工件5时,即可将工件5吸取上来;通过对吸盘本体2进行断电,吸盘本体2消磁,消磁后的吸盘本体2失去磁性,工件5可从吸盘本体2处掉落。此外,当吸盘本体2消磁后,吸附于吸盘本体2上的铁屑也能掉落下来,便于吸盘本体2的清理。
36.参照图2,安装板4的靠近吸盘本体2的一端固定连接有第一滑轨41和第二滑轨42,第一滑轨41的长度方向和第二滑轨42的长度方向相同,第一滑轨41上滑移连接有第一滑块411,第二滑轨42上滑移连接有第二滑块421,第一滑块411的底端固定连接有第一爪夹4111,第二滑块421的底端固定连接有第二爪夹4211,第一爪夹4111和第二爪夹4211安装于吸盘本体2的两侧。安装板4固定连接有第一驱动件43和第二驱动件44,第一驱动件43的输出端与第一爪夹4111固定连接,第二驱动件44的输出端与第二爪夹4211固定连接。本实施例中,第一驱动件43和第二驱动件44可以是气缸。
37.参照图1和图2,当目标工件5被吸取到吸盘本体2上的时候,第一驱动件43启动,带动第一爪夹4111朝向第二爪夹4211移动,与此同时,第二驱动件44启动,带动第二爪夹4211朝向第一爪夹4111移动。第一爪夹4111和第二爪夹4211进行相对移动直至第一爪夹4111与
工件5的一侧抵触,第二爪夹4211与工件5的另一侧抵触后,第一驱动件43和第二驱动件44停止。第一爪夹4111和第二爪夹4211抵住工件5的两侧,对工件5起到辅助夹持的作用,减小工件5从吸盘本体2上掉落下来的可能性,一方面减少工件5受损的情况发生,另一方面减少工件5掉落造成的安全隐患。
38.本技术实施例一种机械手用电动吸盘装置的实施原理为:在使用该电动吸盘装置时,机械手臂带动固定板1在水平方向和竖直方向上进行移动,固定板1带动吸盘本体2移动直至吸盘本体2靠近工件5的上端时,吸盘本体2充磁,将工件5吸取上来,完成工件5的上料。随后,第一驱动件43启动,带动第一爪夹4111朝向第二爪夹4211移动,与此同时,第二驱动件44启动,带动第二爪夹4211朝向第一爪夹4111移动,从而使得第一爪夹4111与工件5的一侧抵触,第二爪夹4211与工件5的另一侧抵触。通过机械手臂可以带动吸盘本体2移动,从而带动工件5进行运输,工件5到达目标下料点时,吸盘本体2消磁,工件5即可掉落到指定位置。
39.在吸取工件5时,工件5受到惯性会对吸盘本体2进行推压,通过缓冲组件21的设置,可以对吸盘本体2进行缓冲,减少工件5与吸盘本体2接触后发生相互挤压的情况,从而减小工件5和吸盘本体2发生损坏的可能性。
40.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。