1.本实用新型涉及水上救生工具领域,更具体地说,本实用新型涉及一种水上智能救生系统。
背景技术:
2.根据调查各大水上景区,水库每年都有溺水身亡的事件发生,现实中大量案例表明,泳池边的专业救生员通常只能在溺水发生30-40秒才观察到溺水事件,而且观测到的几率也只有60%,更多的溺水者被发现时,往往已经错过了抢救的“黄金时间”,对于河流、水库等一些户外场所常常因为施救者不懂正确的施救方法以及没有可以操控的救生设备而使溺水者错过最佳救援时间,造成悲剧的发生。
3.传统救生圈只有漂浮功能,不具有动力装置,只有当救援人员将救生圈抛投在落水者附近时才可发挥作用,且在抛投时易受风速、水速的影响,出现抛投不准的问题,在营救落水者过程消耗了大量的时间,救援效率较低。所以一款智能、高效、准确的救援系统就显得尤为重要。
技术实现要素:
4.为了克服现有技术的上述缺陷,本实用新型的实施例提供一种水上智能救生系统,通过xx,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种水上智能救生系统,包括救生船本体、超声波模块、电源模块、人体红外感应模块和语音识别模块,所述救生船本体采用u型结构设计,且救生船本体的尾部采用圆柱形结构设计,该尾部的内部安装有动力部,所述动力部的内部安装有推进器,所述救生船本体的顶部安装有控制器,所述控制器上设置有信号转换器,所述救生船本体的顶部位于控制器的前侧安装有报警器,所述超声波模块包括安装在报警器的前侧的第一超声波传感器和设置在控制器两侧的第二超声波传感器,所述人体红外感应模块包括设置在第一超声波传感器一侧的红外传感器,所述语音识别模块具体为一种设置在第一超声波传感器另一侧的语音识别器,所述救生船本体的顶部靠近两个第二超声波传感器的后侧位置处均设置有船体把手,所述救生船本体的前端部设置有u型凹槽,所述u型凹槽的内部安装有安全气囊,所述救生船本体的内部安装有用于对安全气囊充气的气泵,所述电源模块具体为一种安装在靠近动力部前侧部分的蓄电池。
6.在一个优选地实施方式中,所述推进器包括安装在动力部内部的马达,所述马达的输出轴端部靠近救生船本体的尾部位置处连接有螺旋桨,且动力部的内部对应防水隔板所在的外部连接有用于防水的防水隔板。
7.在一个优选地实施方式中,所述船体把手的两端部与救生船本体的顶部之间均通过螺栓固定连接。
8.在一个优选地实施方式中,所述救生船本体上的信号转换器通过蓝牙信号或红外信号与外部手机终端控制连接。
9.在一个优选地实施方式中,所述安全气囊整体为u型结构,且安全气囊的两外侧壁均设置有气囊把手。
10.在一个优选地实施方式中,所述救生船本体的顶部对应蓄电池和控制器的外部均设置有凹槽,该凹槽的顶部连接有防水密封盖。
11.在一个优选地实施方式中,所述救生船本体的尾端位于动力部的后侧位置处连接有防护网,所述防护网为金属网状结构,且防护网的四个边角处与救生船本体的尾端部边缘之间均通过螺钉固定连接。
12.本实用新型的有益效果:
13.1、设计的救生船本体采用上下对称的设计方法,这样使得救生船本体在遭遇风浪或其他因素导致的船体倾覆后,仍然能够继续正常工作,克服了传统救生船翻滚后不能正常工作的弊端,独特的圆润艇体设计,有效的解决了撞水面的阻力,使船体能轻松在3-4级风浪情况下沿遥控路线行驶,整体呈现流线型,重心稳,符合优化流体力学机身设计;
14.2、救生船本体前方设计有一个u型凹槽,安全气囊存放于u型凹槽中,当到达溺水者附近时,救生船本体弹出安全气囊,增加救生船浮力,采用气囊的设计极大的缩减了救生设备的体积从而提高救援速度及避障能力,救生气囊把手位于u型对称设计的两侧,扶搭载方便,便于溺水者抓住气囊,安全性更高,救生船本体尾部呈圆柱状结构设置,内部安装有两个螺旋桨推进器,救生船本体上的左右两侧各安装有一个船体把手,方便落水者抓取,推进器为螺旋桨推进器,且推进器外侧安装有防护网,可防止异物缠绕,设置的控制器上的信息接收器用于接收手机发送的无线信号,并将信号发送至控制器,控制器在接收到无线信号后,控制推进器工作;
15.3、本救生船本体增加了人体红外感应模块、语音识别模块、超声波模块和报警器,当有人落水时,救生船本体可通过人体红外感应或者落水者所发出的求救信号定位落水者的位置,并且可以迅速行驶到落水者旁边,瞬间弹出安全气囊,使溺水者获救,救生船本体还可以通过岸上人员操作手机终端远程控制救生船本体运动实现对落水者的施救,报警器用于当救生船识别到溺水者时可及时向周围环境发出报警信号使得附近人员能及时发现落水者,在一定程度上解决了溺水者发现不及时的问题,位于救生船本体两侧和前方的超声波传感器,根据声波发射和接受的时间差计算每个超声波模块到障碍物的距离,采用“三点定位算法”对障碍物的位置进行确定。
附图说明
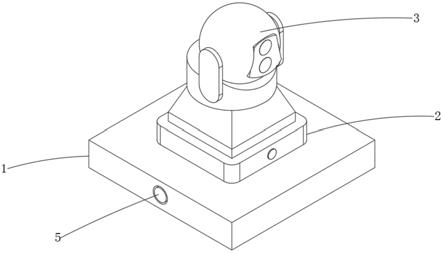
16.图1为本实用新型的整体结构示意图。
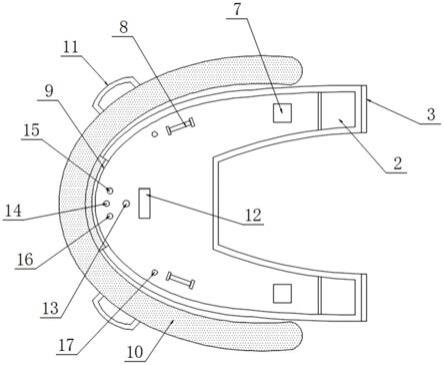
17.图2为本实用新型中安全气囊收起时的结构示意图。
18.图3为本实用新型中动力部的内部结构示意图。
19.图4为本实用新型的控制电路图。
20.附图标记为:1、救生船本体;2、动力部;3、防护网;4、马达;5、防水隔板;6、螺旋桨;7、蓄电池;8、船体把手;9、u型凹槽;10、安全气囊;11、气囊把手;12、控制器;13、报警器;14、第一超声波传感器;15、红外传感器;16、语音识别器;17、第二超声波传感器。
4级风浪情况下沿遥控路线行驶,整体呈现流线型,重心稳,符合优化流体力学机身设计,救生船本体1前方设计有一个u型凹槽9,安全气囊10存放于u型凹槽9中,当到达溺水者附近时,救生船本体1弹出安全气囊10,增加救生船浮力,采用气囊的设计极大的缩减了救生设备的体积从而提高救援速度及避障能力,救生气囊把手11位于u型对称设计的两侧,扶搭载方便,便于溺水者抓住气囊,安全性更高,救生船本体1尾部呈圆柱状结构设置,内部安装有两个螺旋桨推进器,且救生圈本体1的横截面的面积随着靠近尾端的距离的减小而减小,救生船本体1上的左右两侧各安装有一个船体把手8,方便落水者抓取,推进器为螺旋桨推进器,且推进器外侧安装有防护网3,可防止异物缠绕,一个螺旋桨对应连接一个马达,设置的控制器上的信息接收器用于接收手机发送的无线信号,并将信号发送至控制器,控制器在接收到无线信号后,控制推进器工作;
31.且本救生船本体1增加了人体红外感应模块、语音识别模块、超声波模块和报警器13,当有人落水时,救生船本体1可通过人体红外感应或者落水者所发出的求救信号定位落水者的位置,并且可以迅速行驶到落水者旁边,瞬间弹出安全气囊10,使溺水者获救,救生船本体1还可以通过岸上人员操作手机终端远程控制救生船本体1运动实现对落水者的施救,报警器13用于当救生船识别到溺水者时可及时向周围环境发出报警信号使得附近人员能及时发现落水者,在一定程度上解决了溺水者发现不及时的问题,位于救生船本体1两侧和前方的超声波传感器,根据声波发射和接受的时间差计算每个超声波模块到障碍物的距离,采用“三点定位算法”对障碍物的位置进行确定。
32.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
33.其次:本实用新型公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本实用新型同一实施例及不同实施例可以相互组合;
34.最后:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。