一种针对pm2.5微生物气溶胶的智能消毒机器人
技术领域:
1.本发明涉及一种针对pm2.5微生物气溶胶的智能消毒机器人。
背景技术:
2.气溶胶是指液体或固态微粒悬浮于气体介质中所形成的分散体系。在该体系中,细菌、真菌以及病毒等微生物与空气动力学当量直径小于或等于2.5微米的细颗粒物相结合即形成了pm2.5微生物气溶胶。该微生物气溶胶作为常规环境气溶胶的主要组分,其不仅具备常规气溶胶分布不均匀和复杂性等一般特点,还具有侵染性和长期致害性等特有的生物学特性,为近年来公共环境卫生领域重点关注的科学问题。
3.现有诸多研究报道指出,pm2.5微生物形成的气溶胶已成为医院、商场、车站和学校等人员密集场所的主要污染源;在当前,新冠疫情全球化和常态化的严峻形势下,上述人员密集场所的公共卫生问题倍受防疫部门和人民大众的高度重视;然而,目前人员密集场所常见的消毒防疫措施大多采取人工或消毒设备定时、定点的消毒措施,消毒效果不仅存在未知性,还存在防疫成本过高等诸多问题;为此,发明一款针对pm2.5微生物气溶胶的实时监测和精准消毒的高度智能化机器人产品更符合当前疫情防控形势需要。
4.一般情况下,现有的pm2.5微生物气溶胶检测设备是基于激光散射原理来对环境中的微生物气溶胶进行检测,但由于空气环境中的杂质较多,在检测过程中其他类别的微小颗粒均会对检测结果产生影响,致使检测数据误差较大,检测精准度不能满足现有要求;此外,现有的检测设备大都是固定式的,不便于进行移动和操作,检测设备的功能性较差,当人员密集场所的面积较大时,现有的检测设备工作效率较低,导致检测数据的获取和反馈速率较慢,不能很好的适用于人员密集场所的日常检测消毒工作。
技术实现要素:
5.本发明实施例提供了一种针对pm2.5微生物气溶胶的智能消毒机器人,结构设计合理,基于多个功能组件的相互配合作用,配合控制器的集成控制作用,能够在微生物气溶胶检测处理过程中将空气中的其他微小颗粒物质进行分离和筛除,提升检测处理的精准度,借助atp生物发光理论,通过atp荧光强度值与微生物浓度正相关的函数关系精准计算所处空间的微生物总数,进而根据微生物总数和消毒剂的消毒能力来计算匹配精准剂量的消毒剂;同时还能够丰富整个检测处理消毒机器人的功能性,方便进行移动和操作,进一步加快检测数据的获取反馈处理效率,提高智能消毒机器人的整体工作效率,从而很好的对医院、商场科室或手术室等人员密集场所内的pm2.5微生物气溶胶进行检测处理消毒,保证人员密集场所的安全洁净、降低pm2.5微生物气溶胶的危害,达到实时监测、精准消毒的效果,解决了现有技术中存在的问题。
6.本发明为解决上述技术问题所采用的技术方案是:
7.一种针对pm2.5微生物气溶胶的智能消毒机器人,包括壳体,在壳体内设有收集瓶,在壳体上连接有分级采集组件,所述分级采集组件包括与壳体相连的采集管道,在采集
管道内设有多个不同数量级的过滤网,所述过滤网用于分离出不同规格的微小颗粒并将pm2.5微生物气溶胶传输到收集瓶,所述收集瓶通过隔膜泵与采集管道相连;在采集管道上设有荧光反应组件,所述荧光反应组件包括atp检测瓶,在atp检测瓶内设有荧光仪,在atp检测瓶上连接有试剂瓶和反应酶瓶,所述荧光反应组件用于对pm2.5微生物气溶胶进行荧光检测;在壳体上还设有消毒组件,所述消毒组件包括雾化器,在雾化器上通过加压泵连接有伸缩管道,在伸缩管道上连接有喷头,所述喷头通过翻转电机与伸缩管道相连,以实现消毒方向的自动调节,在伸缩管道的顶部设有与喷头相配合的限位板;在壳体的顶部设有检测组件,所述检测组件用于检测医院科室的环境参数,所述检测组件包括相配合设置的温度传感器、湿度传感器和气压传感器;在壳体内底部设有供电组件,所述供电组件包括ups电源,所述ups电源通过稳压器连接有锂电池;在壳体内还设有控制器,所述控制器通过驱动器与荧光仪、喷头和翻转电机相连,所述控制器通过触发器与加压泵和隔膜泵相连,在控制器上通过无线收发器与上位机相连以实现远程控制,所述控制器通过ad转换器与检测组件相连;在壳体的底部设有agv小车,以带动消毒机器人移动。
8.在控制器上还连接有指令输入器和计时器,所述指令输入器向控制器输入控制指令,所述计时器用于记录对应检测时间节点;所述控制器的型号为stm32f103c8t6,在控制器上设有64个引脚,所述控制器通过一号引脚与锂电池相连,所述控制器通过四号引脚与指令输入器相连,所述控制器通过十五号引脚与ad转换器相连,所述控制器通过二十号引脚和二十一号引脚与无线收发器相连,所述控制器通过三十三号引脚和三十四号引脚与触发器相连,所述控制器通过三十八号引脚与驱动器相连,所述控制器通过四十五号引脚与计时器相连。
9.所述稳压器用于向锂电池持续稳定进行充电,所述稳压器的型号为lm317,在稳压器上设有三个引脚,所述稳压器通过一号引脚与ups电源相连,在稳压器的一号引脚和二号引脚之间设有第四电容和第五电阻,在稳压器的二号引脚和三号引脚之间设有第五电容和第六电阻,所述稳压器的三号引脚与锂电池相连,所述锂电池与控制器的一号引脚相连。
10.所述指令输入器的型号为tlp290,在指令输入器上设有四个引脚,所述指令输入器的一号引脚为监测指令输入引脚,在指令输入器的一号引脚和二号引脚之间并联有第九电阻、第十电阻和第四电容,在指令输入器的三号引脚和四号引脚之间并联有第五电容和第八电阻,所述指令输入器的三号引脚与控制器的四号引脚相连。
11.所述ad转换器的型号为ad8551,在ad转换器上设有8个引脚,所述ad转换器通过六号引脚与控制器的十五号引脚相连,所述ad转换器通过三号引脚与湿度传感器、温度传感器和气压传感器相连;所述湿度传感器的型号为kzws-01,所述温度传感器的型号为sht20,所述气压传感器的型号为mik-p300。
12.所述无线收发器的型号为esp8266,在无线收发器上设有8个引脚,所述无线收发器通过四号引脚与控制器的二十一号引脚相连,所述无线收发器通过八号引脚与控制器的二十号引脚相连。
13.所述触发器的型号为fds9945,所述触发器的二号引脚与控制器的三十八号引脚相连,所述触发器的三号引脚与控制器的三十七号引脚相连,在触发器的五号引脚上连接有加压泵,在触发器的八号引脚上连接有隔膜泵;驱动器的型号为uln2003,在驱动器上设有16个引脚,所述驱动器通过一号引脚与控制器的三十八号引脚相连,在驱动器的十六号
引脚上连接有第一继电器,在第一继电器上设有相并联的第一电阻和第一二极管,在第一继电器上设有设备接口,所述设备接口用于电气连接荧光仪、翻转电机和喷头。
14.所述计时器的型号为ds1302,在计时器上设有8个引脚,所述计时器的六号引脚和七号引脚之间设有相并联的第四电阻和第四电容,所述计时器的七号引脚与控制器的四十五号引脚相连。
15.在收集瓶上连接有废料桶和介质采样桶;在检测组件外部罩设有绝缘挡板,以消除电气干扰。
16.在avg小车底部通过联轴器与多个万向轮相连,以实现万向轮的同步联动。
17.本发明采用上述结构,通过分级采集组件将不同规格的微小颗粒进行分离并将pm2.5微生物气溶胶传输到收集瓶;通过荧光反应组件来对pm2.5微生物气溶胶进行荧光检测,从而确定气溶胶的具体状态和参数;通过消毒组件根据荧光检测结果来控制雾化器和加压泵对医院科室进行有效消毒;通过翻转电机来实现消毒方向的自动全方位调节;通过检测组件来检测医院科室的环境参数,为消毒组件的动作提供反馈和依据;通过供电组件使控制器长时间平稳运行,具有高效精准、安全实用的优点。
附图说明:
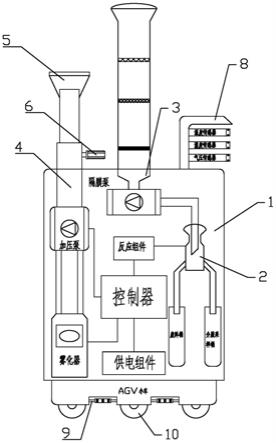
18.图1为本发明的结构示意图。
19.图2为本发明的消毒组件的结构示意图。
20.图3为图2的侧视图。
21.图4为本发明的荧光反应组件的结构示意图。
22.图5为本发明的供电组件的结构示意图。
23.图6为本发明的控制原理图。
24.图7为本发明的控制器的电气原理图。
25.图8为本发明的稳压器的电气原理图。
26.图9为本发明的指令输入器的电气原理图。
27.图10为本发明的ad转换器的电气原理图。
28.图11为本发明的气压传感器的结构示意图。
29.图12为本发明的温度传感器的结构示意图。
30.图13为本发明的湿度传感器的结构示意图。
31.图14为本发明的无线收发器的电气原理图。
32.图15为本发明的触发器的电气原理图。
33.图16为本发明的驱动器的电气原理图。
34.图17为本发明的计时器的电气原理图。
35.图中,1、壳体,2、收集瓶,3、采集管道,4、伸缩管道,5、喷头,6、翻转电机,7、限位板,8、绝缘挡板,9、联轴器,10、万向轮。
具体实施方式:
36.为能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本发明进行详细阐述。
37.如图1-17中所示,一种针对pm2.5微生物气溶胶的智能消毒机器人,包括壳体1,在壳体1内设有收集瓶2,在壳体1上连接有分级采集组件,所述分级采集组件包括与壳体1相连的采集管道3,在采集管道3内设有多个不同数量级的过滤网,所述过滤网用于分离出不同规格的微小颗粒并将pm2.5微生物气溶胶传输到收集瓶2,所述收集瓶2通过隔膜泵与采集管道3相连;在采集管道3上设有荧光反应组件,所述荧光反应组件包括atp检测瓶,在atp检测瓶内设有荧光仪,在atp检测瓶上连接有试剂瓶和反应酶瓶,所述荧光反应组件用于对pm2.5微生物气溶胶进行荧光检测;在壳体上还设有消毒组件,所述消毒组件包括雾化器,在雾化器上通过加压泵连接有伸缩管道4,在伸缩管道4上连接有喷头5,所述喷头5通过翻转电机6与伸缩管道4相连,以实现消毒方向的自动调节,在伸缩管道4的顶部设有与喷头5相配合的限位板7;在壳体1的顶部设有检测组件,所述检测组件用于检测医院科室的环境参数,所述检测组件包括相配合设置的温度传感器、湿度传感器和气压传感器;在壳体1内底部设有供电组件,所述供电组件包括ups电源,所述ups电源通过稳压器连接有锂电池;在壳体1内还设有控制器,所述控制器通过驱动器与荧光仪、喷头5和翻转电机6相连,所述控制器通过触发器与加压泵和隔膜泵相连,在控制器上通过无线收发器与上位机相连以实现远程控制,所述控制器通过ad转换器与检测组件相连;在壳体1的底部设有agv小车,以带动消毒机器人移动。
38.在控制器上还连接有指令输入器和计时器,所述指令输入器向控制器输入控制指令,所述计时器用于记录对应检测时间节点;所述控制器的型号为stm32f103c8t6,在控制器上设有64个引脚,所述控制器通过一号引脚与锂电池相连,所述控制器通过四号引脚与指令输入器相连,所述控制器通过十五号引脚与ad转换器相连,所述控制器通过二十号引脚和二十一号引脚与无线收发器相连,所述控制器通过三十三号引脚和三十四号引脚与触发器相连,所述控制器通过三十八号引脚与驱动器相连,所述控制器通过四十五号引脚与计时器相连。
39.所述稳压器用于向锂电池持续稳定进行充电,所述稳压器的型号为lm317,在稳压器上设有三个引脚,所述稳压器通过一号引脚与ups电源相连,在稳压器的一号引脚和二号引脚之间设有第四电容和第五电阻,在稳压器的二号引脚和三号引脚之间设有第五电容和第六电阻,所述稳压器的三号引脚与锂电池相连,所述锂电池与控制器的一号引脚相连。
40.所述指令输入器的型号为tlp290,在指令输入器上设有四个引脚,所述指令输入器的一号引脚为监测指令输入引脚,在指令输入器的一号引脚和二号引脚之间并联有第九电阻、第十电阻和第四电容,在指令输入器的三号引脚和四号引脚之间并联有第五电容和第八电阻,所述指令输入器的三号引脚与控制器的四号引脚相连。
41.所述ad转换器的型号为ad8551,在ad转换器上设有8个引脚,所述ad转换器通过六号引脚与控制器的十五号引脚相连,所述ad转换器通过三号引脚与湿度传感器、温度传感器和气压传感器相连;所述湿度传感器的型号为kzws-01,所述温度传感器的型号为sht20,所述气压传感器的型号为mik-p300。
42.所述无线收发器的型号为esp8266,在无线收发器上设有8个引脚,所述无线收发器通过四号引脚与控制器的二十一号引脚相连,所述无线收发器通过八号引脚与控制器的二十号引脚相连。
43.所述触发器的型号为fds9945,所述触发器的二号引脚与控制器的三十八号引脚
相连,所述触发器的三号引脚与控制器的三十七号引脚相连,在触发器的五号引脚上连接有加压泵,在触发器的八号引脚上连接有隔膜泵;驱动器的型号为uln2003,在驱动器上设有16个引脚,所述驱动器通过一号引脚与控制器的三十八号引脚相连,在驱动器的十六号引脚上连接有第一继电器,在第一继电器上设有相并联的第一电阻和第一二极管,在第一继电器上设有设备接口,所述设备接口用于电气连接荧光仪、翻转电机和喷头。
44.所述计时器的型号为ds1302,在计时器上设有8个引脚,所述计时器的六号引脚和七号引脚之间设有相并联的第四电阻和第四电容,所述计时器的七号引脚与控制器的四十五号引脚相连。
45.在收集瓶2上连接有废料桶和介质采样桶;在检测组件外部罩设有绝缘挡板8,以消除电气干扰。
46.在avg小车底部通过联轴器9与多个万向轮10相连,以实现万向轮10的同步联动。
47.本发明实施例中的一种针对pm2.5微生物气溶胶的智能消毒机器人的工作原理为:基于多个功能组件的相互配合作用,配合控制器的集成控制作用,能够在微生物气溶胶检测处理过程中将空气中的其他微小颗粒物质进行分离和筛除,提升检测处理的精准度,借助atp生物发光理论,通过atp荧光强度值与微生物浓度正相关的函数关系精准计算所处空间的微生物总数,进而根据微生物总数和消毒剂的消毒能力来计算匹配精准剂量的消毒剂;同时还能够丰富整个检测处理消毒机器人的功能性,方便进行移动和操作,进一步加快检测数据的获取反馈处理效率,提高智能消毒机器人的整体工作效率,从而很好的对医院、商场科室或手术室等人员密集场所内的pm2.5微生物气溶胶进行检测处理消毒,保证人员密集场所的安全洁净、降低pm2.5微生物气溶胶的危害。
48.在整体方案中,主要包括壳体1,在壳体1内设有收集瓶2,在壳体1上连接有分级采集组件,分级采集组件包括与壳体1相连的采集管道3,在采集管道3内设有多个不同数量级的过滤网,用于分离出不同规格的微小颗粒并将pm2.5微生物气溶胶传输到收集瓶2,收集瓶2通过隔膜泵与采集管道3相连;在采集管道3上设有荧光反应组件,荧光反应组件包括atp检测瓶,在atp检测瓶内设有荧光仪,在atp检测瓶上连接有试剂瓶和反应酶瓶,用于对pm2.5微生物气溶胶进行荧光检测;在壳体上还设有消毒组件,所述消毒组件包括雾化器,在雾化器上通过加压泵连接有伸缩管道4,在伸缩管道4上连接有喷头5,所述喷头5通过翻转电机6与伸缩管道4相连,以实现消毒方向的自动调节,在伸缩管道4的顶部设有与喷头5相配合的限位板7;在壳体1的顶部设有检测组件,所述检测组件用于检测医院科室的环境参数,所述检测组件包括相配合设置的温度传感器、湿度传感器和气压传感器;在壳体1内底部设有供电组件,所述供电组件包括ups电源,所述ups电源通过稳压器连接有锂电池;在壳体1内还设有控制器,所述控制器通过驱动器与荧光仪、喷头5和翻转电机6相连,所述控制器通过触发器与加压泵和隔膜泵相连,在控制器上通过无线收发器与上位机相连以实现远程控制,所述控制器通过ad转换器与检测组件相连;在壳体1的底部设有agv小车,以带动消毒机器人移动;在单片机控制器的集成控制原理下,将多个功能组件进行统一驱动控制,来实现医院科室内的pm2.5微生物气溶胶的检测和处理。
49.进一步的,核心组件为内部的控制器,控制器的型号为stm32f103c8t6,在控制器上设有64个引脚,所述控制器通过一号引脚与锂电池相连,所述控制器通过四号引脚与指令输入器相连,所述控制器通过十五号引脚与ad转换器相连,所述控制器通过二十号引脚
和二十一号引脚与无线收发器相连,所述控制器通过三十三号引脚和三十四号引脚与触发器相连,所述控制器通过三十八号引脚与驱动器相连,所述控制器通过四十五号引脚与计时器相连,从而构成了整体硬件电路,并依靠上述整体硬件电路来实现对多个功能组件的自动控制。
50.特别说明的,本发明实施例中的一种针对pm2.5微生物气溶胶的智能消毒机器人不仅可以适用于医院各个科室,还能够应用于其他洁净程度要求的场合和环境;使用时只需要将机器人移动到指定位置。
51.优选的,稳压器用于向锂电池持续稳定进行充电,所述稳压器的型号为lm317,在稳压器上设有三个引脚,所述稳压器通过一号引脚与ups电源相连,在稳压器的一号引脚和二号引脚之间设有第四电容和第五电阻,在稳压器的二号引脚和三号引脚之间设有第五电容和第六电阻,所述稳压器的三号引脚与锂电池相连,所述锂电池与控制器的一号引脚相连,在稳压器和锂电池的相互配合作用下,可以保证控制器长时间平稳工作。
52.优选的,指令输入器的型号为tlp290,在指令输入器上设有四个引脚,所述指令输入器的一号引脚为监测指令输入引脚,在指令输入器的一号引脚和二号引脚之间并联有第九电阻、第十电阻和第四电容,在指令输入器的三号引脚和四号引脚之间并联有第五电容和第八电阻,所述指令输入器的三号引脚与控制器的四号引脚相连,从而能够向控制器传输控制指令,来快速触发控制器进入工作状态,避免控制器出现误操作;同时,控制器可以根据指令输入器输入的控制指令来反馈触发信号,形成闭环控制,减少外部条件的干扰。
53.优选的,ad转换器的型号为ad8551,在ad转换器上设有8个引脚,所述ad转换器通过六号引脚与控制器的十五号引脚相连,所述ad转换器通过三号引脚与湿度传感器、温度传感器和气压传感器相连;所述湿度传感器的型号为kzws-01,所述温度传感器的型号为sht20,所述气压传感器的型号为mik-p300;能够检测医院科室内的环境参数,并转换成控制器可识别的数据类型传输到控制器,保证控制器能够准确检测医院科室的环境参数,为pm2.5微生物气溶胶的检测和处理提供数据支撑。
54.优选的,无线收发器的型号为esp8266,在无线收发器上设有8个引脚,所述无线收发器通过四号引脚与控制器的二十一号引脚相连,所述无线收发器通过八号引脚与控制器的二十号引脚相连,在上位机和控制器之间建立无线通讯,实现对控制器远程控制,使检测数据进行上传,方便用户进行掌握。
55.优选的,触发器的型号为fds9945,所述触发器的二号引脚与控制器的三十八号引脚相连,所述触发器的三号引脚与控制器的三十七号引脚相连,在触发器的五号引脚上连接有加压泵,在触发器的八号引脚上连接有隔膜泵;驱动器的型号为uln2003,在驱动器上设有16个引脚,所述驱动器通过一号引脚与控制器的三十八号引脚相连,在驱动器的十六号引脚上连接有第一继电器,在第一继电器上设有相并联的第一电阻和第一二极管,在第一继电器上设有设备接口,所述设备接口用于电气连接荧光仪、翻转电机和喷头,可以精准控制机器人上每个功能组件的动作,来完成pm2.5微生物气溶胶的检测和处理。
56.在avg小车底部通过联轴器9与多个万向轮10相连,以实现万向轮10的同步联动,方便avg小车带动机器人自由移动,到达指定位置来进行检测处理和消毒;相较于现有技术中的固定式检测设备,更为实用灵活,使用更加便利,方便用户进行操作。
57.实际使用时,将机器人放置在待检测处理的应用场景中,指令输入器向控制器传
输控制指令,控制器进入工作状态;经过采集管道3和不同数量级的过滤网,将pm2.5微生物气溶胶注入到收集瓶2中来进行检测处理,在试剂瓶和反应酶瓶的夹持下,对pm2.5微生物气溶胶进行荧光检测;然后根据检测得到的数据结果来调节消毒组件的位置和动作来完成消毒操作,并且喷头5可以通过翻转电机6来实现消毒方向的自动调节,可以实现全方位无死角消毒。
58.进一步的,检测组件内的湿度传感器、温度传感器和气压传感器可以精准检测出环境参数,可以更好的进行调节控制来对医院科室进行消毒;并且检测组件外部还设有绝缘挡板8,可以消除传感器直接的电气干扰,提升检测数据的精准度。
59.综上所述,本发明实施例中的一种针对pm2.5微生物气溶胶的智能消毒机器人基于多个功能组件的相互配合作用,配合控制器的集成控制作用,能够在微生物气溶胶检测处理过程中将空气中的其他微小颗粒物质进行分离和筛除,提升检测处理的精准度,借助atp生物发光理论,通过atp荧光强度值与微生物浓度正相关的函数关系精准计算所处空间的微生物总数,进而根据微生物总数和消毒剂的消毒能力来计算匹配精准剂量的消毒剂;同时还能够丰富整个检测处理消毒机器人的功能性,方便进行移动和操作,进一步加快检测数据的获取反馈处理效率,提高智能消毒机器人的整体工作效率,从而很好的对医院、商场科室或手术室等人员密集场所内的pm2.5微生物气溶胶进行检测处理消毒,保证人员密集场所的安全洁净、降低pm2.5微生物气溶胶的危害,方便进行普及推广。
60.上述具体实施方式不能作为对本发明保护范围的限制,对于本技术领域的技术人员来说,对本发明实施方式所做出的任何替代改进或变换均落在本发明的保护范围内。
61.本发明未详述之处,均为本技术领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
