1.本实用新型公开的属于智慧农业技术领域,具体为一种自适应行进速度的施肥播种系统。
技术背景
2.在智慧农业技术领域中,机械化播种、施肥效率提高,由于机器行进速度不定,不能保证施肥或播种的均匀性,降低了肥料和种子的利用率。由此可知,现需要一种能够根据机器行进速度实时自动调整施肥量的播种控制装置。
3.目前,应用于施肥播种机上的施肥播种装置大多为机械式或手动调节式,完成排肥量调节操作需要加装特定的直流电机控制器,且需要操作人员手动调节,该方案无法根据车速自动调节排量,并且操作繁琐,无法根据行进速度自动调整排量,即对行进速度无自适应性;排种量调节装置大多为机械式结构,由地轮提供动力,通过特定机械结构完成,若需要改变传动比则需要重新设计机械结构,造价高,不能实现无级调速。
4.为此,我们提出了一种自适应行进速度的施肥播种系统,以解决上述问题。
技术实现要素:
5.本实用新型的目的在于提供一种自适应行进速度的施肥播种系统,以解决上述技术背景中提出的传统的施肥播种系统自动化程度低、机械结构复杂、无法完成无级调速、对行进速度不具有自适应性的问题。
6.为了实现上述目的,本实用新型提供如下技术方案为:一种自适应行进速度的施肥播种系统,其特征是,包括测速系统安装支架、编码器、联轴器、霍尔传感器、磁钢、主控制器、步进电机控制器、驱动电机、液晶显示屏、红外键盘、控制系统电器盒;
7.所述的测速系统安装支架前端连接有编码器,侧端连接有霍尔传感器,所述编码器转轴上安装有联轴器,所述的联轴器表面安装有磁钢,所述的编码器和霍尔传感器电性输出连接有主控制器,所述的主控制器电性输出连接有步进电机控制器和液晶显示屏,所述的主控制器输入连接有红外键盘,所述的步进电机控制器电性输出连接有驱动电机,所述的主控制器、步进电机控制器和液晶显示屏均分装在控制系统电器盒内。
8.优选的,所述的测速系统安装支架前端有编码器定位螺孔和定位圆孔,侧端有霍尔传感器定位直槽孔,后端有四个对称分布的定位直槽孔和一个地轮轴定位圆孔,所述的编码器定位圆孔与地轮轴定位圆孔同心。
9.优选的,所述的编码器通过螺纹连接安装于测速系统安装支架前端定位圆孔。
10.优选的,所述的霍尔传感器通过螺纹连接安装于测速系统安装支架侧端霍尔传感器定位直槽孔,霍尔传感器正对磁钢,且二者距离为8mm。
11.优选的,所述的联轴器一端安装于编码器转轴,另一端连接本实用新型自适应行进速度的施肥播种系统外部农机地轮轴,并通过螺纹连接紧固。
12.优选的,所述的磁钢共有三个,胶合安装于联轴器外表面,相邻两个磁钢夹角为
120
°
。
13.优选的,所述的驱动电机由步进电机和行星齿轮减速机组成,行星齿轮减速机通过螺纹连接安装于步进电机输出轴上,步进电机最大扭矩为14n.m,行星齿轮减速机速比系数为1∶6。
14.优选的,所述的驱动电机控制本实用新型自适应行进速度的施肥播种系统外部农机的排肥轴或者排种轴正常旋转。
15.优选的,所述的主控制器为stm32单片机。
16.与现有技术相比,本实用新型的有益效果是:通过红外键盘和封装在控制系统电器盒上的液晶显示屏可以方便的输入和读取想要的亩均排量,且本实用新型自适应行进速度的施肥播种系统工作期间不需要人工参与,避免了传统施肥播种系统自动化程度低的问题;本实用新型自适应行进速度的施肥播种系统配备测速装置,根据机器实时行进速度实时调节驱动电机转速,即对速度具有较强的自适应性,避免了传统施肥播种系统无法根据机器行进速度实时调节排量、肥料连续性差的问题,同时可实现无级调速。
附图说明
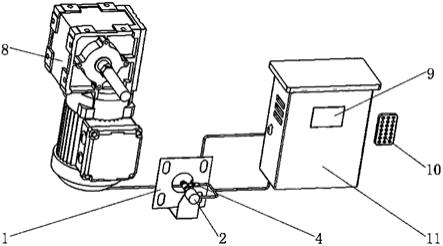
17.图1为本实用新型结构示意图;
18.图2为本实用新型控制系统电器盒内部结构示意图;
19.图3为本实用新型测速系统安装支架结构示意图;
20.图4为本实用新型局部结构示意图;
21.图5为本实用新型原理框图。
22.附图中:
23.→
表示控制信号传递路线;
24.其中:1.测速系统安装支架、2.编码器、3.联轴器、4.霍尔传感器、5.磁钢、6.主控制器、7.步进电机控制器、8.驱动电机、9.液晶显示屏、10.红外键盘、11.控制系统电器盒。
具体实施方式
25.下面将结合本实用新型实例中的附图,对本实用新型实例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.请阅读图1
‑
5,本实用新型提供一种技术方案:一种自适应行进速度的施肥播种系统,包括测速系统安装支架1,所述的测速系统安装支架1前端连接有编码器2,侧端连接有霍尔传感器4,所述编码器2转轴上安装有联轴器3,所述的联轴器3表面安装有磁钢5,所述的编码器2和霍尔传感器4电性输出连接有主控制器6,所述的主控制器6电性输出连接有步进电机控制器7和液晶显示屏9,所述的主控制器6输入连接有红外键盘10,所述的步进电机控制器7电性输出连接有驱动电机8,所述的主控制器6、步进电机控制器7和液晶显示屏9均分装在控制系统电器盒11内。
27.其中,所述的测速系统安装支架1前端有编码器定位螺孔和定位圆孔,侧端有霍尔传感器定位直槽孔,后端有四个对称分布的定位直槽孔和一个地轮轴定位圆孔,所述的编
码器定位圆孔与地轮轴定位圆孔同心,方便编码器2和霍尔传感器3的安装;
28.所述的编码器2通过螺纹连接安装于测速系统安装支架1前端定位圆孔,编码器2主轴随地轮轴同步旋转,以此测得机器行进速度;
29.所述的霍尔传感器4通过螺纹连接安装于测速系统安装支架1侧端霍尔传感器定位直槽孔,霍尔传感器4正对磁钢,且二者距离为8mm,保证霍尔传感器能准确检测到磁钢经过,保证测得速度的准确性;
30.所述的联轴器3一端安装于编码器2转轴,另一端连接本实用新型自适应行进速度的施肥播种系统外部地轮轴,并通过螺纹连接紧固,起到保护编码器2的作用;
31.所述的磁钢5共有三个,胶合安装于联轴器3外表面,相邻两个磁钢5夹角为120
°
,联轴器3转一圈霍尔传感器4将输出三个脉冲信号;
32.所述的驱动电机8由步进电机和行星齿轮减速机组成,行星齿轮减速机通过螺纹连接安装于步进电机输出轴上,步进电机最大扭矩为14n.m,行星齿轮减速机速比系数为1∶6,步进电机配合减速机使用可增加步进电机输出力矩,可提升本实用新型自适应行进速度的施肥播种系统整体负载效应,所述的驱动电机8控制本实用新型自适应行进速度的施肥播种系统外部农机的排肥轴或者排种轴正常旋转,可实现无级调速;
33.所述的主控制器6为stm32单片机。
34.工作原理:当需要进行施肥或播种时,操作人员先通过红外键盘10向主控制器6输入亩均施肥量或亩均播种量,并可在液晶显示屏9上查看到输入信息,确认输入无误后本实用新型自适应行进速度的施肥播种系统启动。
35.由于田间工作振动较大,编码器2会产生一定误差,但其灵敏度较高,霍尔传感器4为非接触式测量,抗干扰能力强,但灵敏度有限,因此选取霍尔传感器4为主测速传感器,编码器2为辅助测速传感器,即以霍尔传感器4测得的数据计算出的速度(下文称霍尔传感器速度)为标准,以编码器2测得的数据计算出的速度(下文称编码器速度)为修正值,修正霍尔传感器速度,最终得出机器实时行进速度。
36.主控制器6实时读取编码器2和霍尔传感器4传递的数据信号,主控制器6计算出机器实时行进速度,并在液晶显示屏9上实时显示。
37.主控制器6将根据实时行进速度和设定排肥量或排种量为基准,自动控制步进电机控制器7,该控制方式通过脉冲频率调制(即pfm)方式实现,即主控制器6向步进电机控制器7输出不同频率的脉冲信号;步进电机控制器7将驱动驱动电机8完成启停、加速、减速、匀速等相应动作,液晶显示屏9上实时显示当前动作信息,以此达到根据机器实时行进速度变化自动调节排肥轴或排种轴转速的目的,实现根据速度大小实时控制排量的功能,即排量对速度具有自适应性。
38.以上是本实用新型的设计结构和所具备的实时控制排量功能的具体实施方式。
39.尽管已经示出和描述了本实用新型的实施例,显然对于本领域的普通技术人员而言,在不脱离本实用新型的原理和精神的情况下对这些实施例进行多种变化、修改、替换和变型,都应落入到本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。