1.本发明属于无人驾驶技术领域,可用于无人驾驶压路机角度的自动控制,确切说是无人驾驶压路机角度自动控制系统。
背景技术:
2.随着无人驾驶技术的快速发展,无人驾驶压路机开始在基础设施、能源、水利等工程实际中投入使用。无人驾驶压路机转向角的测量精度直接影响其行进作业过程,直接影响着碾压作业的质量,更关系到安全问题。对无人驾驶压路机的转向测量和控制是保证其正常施工作业的关键,因此无人驾驶压路机转向角的在线测量技术,在无人驾驶压路机中必不可少。在转向角测量技术领域,目前主要有基于dsp、基于单片机以及基于pc机等几种测量平台,在传感器的选择上有拉线式位移传感器、角度传感器和激光传感器等。
3.激光位移传感器测量角度,是利用安装于车体的激光位移传感器发射激光,照射固定于前钢轮车架上的反光板(铁板),通过记录并处理从光脉冲发出到返回被接收所经历的时间,即可测定目标距离。但是,采用激光位移传感器,存在精度不够高,车辆转向角误差在0.07~0.11度之间;环境要求高,受光照、灰尘、温度与湿度等使用环境影响;工作温度要求在-10~ 45℃之间,不可结露、结冰,白炽灯,受光面照度要求在3,000lx以下;安装使用需要焊接到车体,对车体改动,工作量较大,通用性差成本较高等诸多缺陷。
技术实现要素:
4.为了克服目前现有技术的缺点,本发明的目的在于提供无人驾驶压路机角度自动控制系统,可以满足精度和效率要求的压路机转向角在线测量技术,其测量车辆转向角误差可控制在0.08度内,工作温度在-40~ 85℃,轴的最大负载在轴向20n、径向80n,不受光照灰尘影响,对车体改动较小、成本较低、安装便捷,适合对大部分无人驾驶车辆进行装配。
5.为了实现上述目的,本发明通过下述技术方案实现:
6.无人驾驶压路机角度自动控制系统,其特征在于:角度自动控制系统包括l型安装架、可伸缩气缸、编码器、t型安装架固定卡、t型安装架;
7.在无人驾驶压路机的前车体底部设置一块l型安装架,在l型安装架上设置有可伸缩气缸安装孔;在无人驾驶压路机的后车体底部两侧的油管上设置两块t型安装架固定卡,在所述两块t型安装架固定卡之间设置t型安装架,在所述t型安装架中心的大圆孔处设置编码器。
8.可伸缩气缸一端固定在l型安装架上设置的可伸缩气缸安装孔上,另一端连接编码器;随车辆转向带动可伸缩气缸伸缩,从而带动编码器轴转动,通过编码器输出无人驾驶压路机工程机械的前车体转向角的数据,供无人驾驶控制使用。
9.在所述t型安装架上,设置有三个小圆孔及一个大圆孔,其三个小圆孔为安装编码器的固定孔,大圆孔为编码器轴的安放孔。
10.所述t型安装架的安装姿态,必须保持与车体铰接处转向中心轴垂直,编码器与车
转轴的中心对准,保障安装的编码器轴与车体转向中心轴能保持重合,减小车辆转向时对编码器的损伤。
11.l型安装架1、t型安装架、t型安装架固定卡,均采用厚度3~7mm的铝材。
12.安装方法:将编码器与t型安装架组合,再与车体铰接一侧相固定;在车体铰接另一侧转向梁上打孔,采用攻丝固定一个l型安装架;将可伸缩气缸一端连接编码器,另一端与l型安装架固定,当车辆转向时带动编码器轴转动,输出数据确定压路机或装载机的转向角。本发明的有益效果主要表现在以下方面:
13.一、本发明无人驾驶压路机的角度自动控制系统,可以满足精度和效率要求的压路机转向角在线测量技术,其测量车辆转向角误差可控制在0.08度内。
14.二、本发明无人驾驶压路机的角度自动控制系统,工作温度在-40~ 85℃,轴的最大负载在轴向20n、径向80n,不受光照灰尘影响。
15.三、本发明无人驾驶压路机的角度自动控制系统,对车体改动较小、成本较低、安装便捷,适合对大部分无人驾驶车辆进行装配的优点。
附图说明
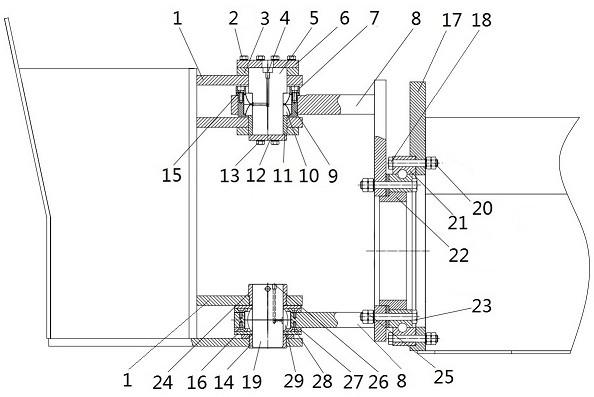
16.图1为本发明控制系统主视图;
17.图2为本发明控制系统俯视图。
18.图中标记:1为l型金属板,2为可伸缩气缸,3为编码器,4为t型安装架固定卡,5为t型安装架。
具体实施方式
19.实施例1:无人驾驶压路机角度自动控制系统
20.其特征在于:角度自动控制系统包括l型安装架1、可伸缩气缸2、编码器3、t型安装架固定卡4、t型安装架5;
21.在无人驾驶压路机的前车体底部设置一块l型安装架1,在l型安装架1上设置有可伸缩气缸2安装孔;在无人驾驶压路机的后车体底部两侧的油管上设置两块t型安装架固定卡4,在所述两块t型安装架固定卡4之间设置t型安装架5;在所述t型安装架5中心的大圆孔处设置编码器3。
22.可伸缩气缸2一端固定在l型安装架1上设置的可伸缩气缸2安装孔上,另一端连接编码器3;随车辆转向带动可伸缩气缸2伸缩,从而带动编码器3轴转动,通过编码器3输出无人驾驶压路机工程机械的前车体转向角的数据,供无人驾驶控制使用。
23.在所述t型安装架5上,设置有三个小圆孔及一个大圆孔,其三个小圆孔为安装编码器3的固定孔,大圆孔为编码器3轴的安放孔。所述t型安装架5的安装姿态,必须保持与车体铰接处转向中心轴垂直,编码器3与车转轴的中心对准,保障安装的编码器3轴与车体转向中心轴能保持重合,减小车辆转向时对编码器3的损伤。
24.l型安装架1、t型安装架5、t型安装架固定卡4,均采用厚度3~7mm的铝材。
25.安装方法:将编码器3与t型安装架5组合,再与车体铰接一侧相固定;在车体铰接另一侧转向梁上打孔,采用攻丝固定一个l型安装架1;将可伸缩气缸2一端连接编码器3,另一端与l型安装架1固定,当车辆转向时带动编码器3轴转动,输出数据确定压路机或装载机
的转向角。
技术特征:
1.无人驾驶压路机角度自动控制系统,其特征在于:角度自动控制系统包括l型安装架(1)、可伸缩气缸(2)、编码器(3)、t型安装架固定卡(4)、t型安装架(5);在无人驾驶压路机的前车体底部设置一块l型安装架(1),在l型安装架(1)上设置有可伸缩气缸(2)安装孔;在无人驾驶压路机的后车体底部两侧的油管上设置两块t型安装架固定卡(4),在所述两块t型安装架固定卡(4)之间设置t型安装架(5);在所述t型安装架(5)中心的大圆孔处设置编码器(3)。2.根据权利要求1所述无人驾驶压路机角度自动控制系统,其特征在于:可伸缩气缸(2)一端固定在l型安装架(1)上设置的可伸缩气缸(2)安装孔上,另一端连接编码器(3);随车辆转向带动可伸缩气缸(2)伸缩,从而带动编码器(3)轴转动,通过编码器(3)输出无人驾驶压路机工程机械的前车体转向角的数据,供无人驾驶控制使用。3.根据权利要求1所述无人驾驶压路机角度自动控制系统,其特征在于:在所述t型安装架(5)上,设置有三个小圆孔及一个大圆孔,其三个小圆孔为安装编码器(3)的固定孔,大圆孔为编码器(3)轴的安放孔。4.根据权利要求1所述无人驾驶压路机角度自动控制系统,其特征在于:所述t型安装架(5)的安装姿态,必须保持与车体铰接处转向中心轴垂直,编码器(3)与车转轴的中心对准,保障安装的编码器(3)轴与车体转向中心轴能保持重合,减小车辆转向时对编码器(3)的损伤。
技术总结
无人驾驶压路机角度自动控制系统,包括L型安装架、可伸缩气缸、编码器、T型安装架固定卡、T型安装架;在无人驾驶压路机的前车体底部设置一块L型安装架,在L型安装架上设置有可伸缩气缸安装孔;在后车体底部两侧的油管上设置两块T型安装架固定卡,在所述两块T型安装架固定卡之间设置T型安装架;在所述T型安装架中心的大圆孔处设置编码器。通过编码器输出无人驾驶压路机工程机械的前车体转向角的数据,供无人驾驶控制使用。优点在于:测量车辆转向角误差在0.08度内、工作温度在-40~ 85℃、不受光照灰尘影响;对车体改动较小、成本较低、安装便捷,适合对大部分无人驾驶车辆进行装配。适合对大部分无人驾驶车辆进行装配。适合对大部分无人驾驶车辆进行装配。
技术研发人员:沈晓钧 刘天云 杨振彪
受保护的技术使用者:陕西省引汉济渭工程建设有限公司
技术研发日:2022.03.30
技术公布日:2022/5/20
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。