1.本发明涉及拉刀技术领域,尤其涉及可设定参数型主轴松拉刀位置状态检测机构。
背景技术:
2.拉刀是用于拉削的成形刀具。刀具表面上有多排刀齿,各排刀齿的尺寸和形状从切入端至切出端依次增加和变化。当拉刀作拉削运动时,每个刀齿就从工件上切下一定厚度的金属,最终得到所要求的尺寸和形状。
3.现有技术的主轴松拉刀位置状态检测机构难以自动对感应铁的移动进行控制,同时当感应铁停止移动时,感应铁自身的稳定性较差,容易影响检测效果,所以我们提出一种可设定参数型主轴松拉刀位置状态检测机构,用于解决上述提出的问题。
技术实现要素:
4.基于背景技术存在主轴松拉刀位置状态检测机构难以自动对感应铁的移动进行控制,同时当感应铁停止移动时,感应铁自身的稳定性较差,容易影响检测效果技术问题,本发明提出了可设定参数型主轴松拉刀位置状态检测机构。
5.本发明提出的可设定参数型主轴松拉刀位置状态检测机构,包括主体与内部中空的底座,所述底座的顶部与主体的底部固定连接,所述底座的顶部固定连接有控制箱,所述主体的右侧转动连接有螺纹管,且螺纹管内螺纹连接有螺纹柱,所述螺纹柱的左端延伸至主体内并固定连接有感应铁,所述主体的顶部内壁固定连接有感应式传感器,所述底座的底部内壁固定安装有电机,且电机输出轴的外壁滑动套设有控制套,所述底座的左侧内壁滑动连接有按钮,且按钮的左侧延伸至底座外,所述底座内设有控制机构与限制机构。
6.优选的,所述控制机构包括控制板、转动环、空心板、配合柱、齿轮柱、齿条、t型板、定位杆、活动板、连接杆与启动套,所述控制板滑动连接在底座的后侧内壁,且控制板的左侧设有斜面,所述按钮的右侧固定连接有梯形板,且梯形板的斜面与控制板相接触,所述转动环转动套设在控制套的外壁,且控制套的左侧滑动连接在底座的左侧内壁,所述控制套的底部与控制板的顶部固定连接,所述空心板固定连接在转动环的顶部,所述空心板内滑动连接有锁定板,且锁定板的右侧固定连接有所述一号弹簧,一号弹簧的一端与空心板的右侧内壁固定连接,所述底座的左侧设有延伸孔,且延伸孔与锁定板活动连接,配合柱转动连接在底座的顶部内壁,所述齿轮柱转动连接在底座的底部内壁,所述齿条滑动连接在底座的底部内壁,且齿条与齿轮柱相啮合,所述t型板滑动连接在底座的前侧内壁,所述定位杆转动连接在t型板的底部,且定位杆的左端与齿条的右侧固定连接,所述活动板滑动连接在控制箱的前侧内壁,所述连接杆转动连接在活动板的左侧,所述启动套固定套设在螺纹管的外壁,控制机构实现自动控制感应铁进行移动的作用。
7.优选的,所述t型板的顶部固定连接有活动带,且活动带的一端与活动板的左侧固定连接,所述控制箱的后侧内壁转动连接有引导柱,且引导柱的外壁与活动带相接触,当t
型板进行移动时,t型板通过活动带可以控制活动板进行移动。
8.优选的,所述启动套的右侧转动连接有万向轮,且万向轮与连接杆的左端固定连接,当连接杆进行移动时,通过万向轮可以控制启动套进行转动。
9.优选的,所述配合柱的底部固定连接有与控制套相适配的延伸柱,且配合柱与控制套活动连接,所述配合柱的外壁与齿轮柱的外壁固定套设有同一个传动带,当配合柱与控制套进行连接时,控制套可以带动连接柱进行转动,同时配合柱通过传动带可以带动齿轮柱进行转动。
10.优选的,所述限制机构包括l型板、接触板、三号弹簧与搭配板,所述l型板固定连接在齿条的顶部,所述接触板滑动连接在底座的右侧内壁,所述三号弹簧固定连接在接触板的底部,且三号弹簧的一端与底座的底部内壁固定连接,所述搭配板固定连接在接触板的顶部,限制机构起到当感应块停止移动时,对感应块进行固定,保证检测的效果。
11.优选的,所述搭配板的顶部固定连接有多个立板,且立板与活动板的左侧活动接触,通过立板与活动板进行接触,实现对活动板的移动进行限制的作用。
12.优选的,所述接触板的顶部设有多个斜面板,且l型板的底部设有与斜面板相适配的三角板,三角板的斜面与斜面板的斜面活动接触,当l型板进行移动时,l型板通过三角板与斜面板进行接触,可以推动接触板循环向下进行移动的作用。
13.优选的,所述底座的顶部内壁固定连接有二号弹簧,且二号弹簧的一端与转动环的顶部固定连接,所述控制箱的右侧内壁固定连接有四号弹簧,且四号弹簧的一端与活动板的底部固定连接,通过二号弹簧的弹力方便推动转动环进行回位,通过四号弹簧的弹力方便拉动活动板进行回位。
14.本发明的有益效果是:
15.1、通过按动按钮进行移动,按钮通过梯形板推动控制板进行上升,同时控制板通过转动环带动空心板进行移动,此时锁定板通过一号弹簧的弹力与延伸孔进行连接,此时锁定板限制转动环的移动;
16.2、同时随着转动环的移动,转动环带动控制套与配合柱进行连接,此时电机的输出轴通过控制套引导配合柱进行转动,并且配合柱通过传动带控制齿轮柱进行转动,此时齿轮柱通过齿条与定位杆推动t型板进行上升,同时t型板通过活动带拉动活动板向左进行移动,此时活动板推动连接杆进行移动,同时连接杆通过万向轮推动控制启动套进行转动,去启动套控制螺纹管进行转动,当螺纹管进行转动时,螺纹管通过螺纹控制螺纹柱向左进行移动,此时螺纹柱带动感应铁在感应式传感器的表面进行移动,实现调节检测的作用;
17.3、同时随着齿条的移动,齿条通过l型板带动三角板与斜面板进行接触,此时斜面板受到压力推动接触板进行下降,同时接触板同步带动搭配板进行下降,此时活动板与立板脱离接触方便进行移动,当接触板通过三号弹簧的弹力推动搭配板进行回位时,此时立板限制活动板的移动,保证感应铁在进行调节后停止进行移动,保证检测稳定性的作用。
18.通过按动按钮引导控制套与配合柱进行连接,此时电机的输出轴进行转动,实现自动控制感应铁进行移动检测的同时,当感应铁停止移动时对感应铁进行固定,保证检测的稳定性。
附图说明
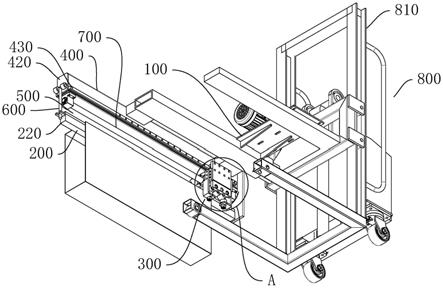
19.图1为本发明提出的可设定参数型主轴松拉刀位置状态检测机构的结构三维图;
20.图2为本发明提出的可设定参数型主轴松拉刀位置状态检测机构的正面剖视图;
21.图3为本发明提出的可设定参数型主轴松拉刀位置状态检测机构的控制套的结构俯视图;
22.图4为本发明提出的可设定参数型主轴松拉刀位置状态检测机构的万向轮、启动套、活动板与连接杆的结构仰视图;
23.图5为本发明提出的可设定参数型主轴松拉刀位置状态检测机构的空心板、锁定板与一号弹簧的结构示意图。
24.图中:1底座、2控制箱、3主体、4电机、5控制套、6转动环、7按钮、8梯形板、9控制板、10空心板、11锁定板、12一号弹簧、13二号弹簧、14配合柱、15齿轮柱、16传动带、17齿条、18定位杆、19 l型板、20万向轮、21 t型板、22启动套、23接触板、24三号弹簧、25搭配板、26活动板、27引导柱、28活动带、29四号弹簧、30连接杆、31螺纹管、32螺纹柱、33感应铁、34感应式传感器。
具体实施方式
25.下面结合具体实施例对本发明作进一步解说。
26.实施例
27.参考图1-5,本实施例中提出了可设定参数型主轴松拉刀位置状态检测机构,包括主体3与内部中空的底座1,底座1的顶部与主体3的底部固定连接,底座1的顶部固定连接有控制箱2,主体3的右侧转动连接有螺纹管31,螺纹管31通过启动环22的引导进行转动,同时通过自身螺纹可以控制螺纹柱32进行移动,从而控制感应铁33进行移动,且螺纹管31内螺纹连接有螺纹柱32,螺纹柱32的左端延伸至主体1内并固定连接有感应铁33,主体1的顶部内壁固定连接有感应式传感器34,感应式传感器34的型号为bip ad2-t017-01-eb02,感应式传感器34可以通过感应铁33移动的距离进行精确检测,底座1的底部内壁固定安装有电机4,且电机4输出轴的外壁滑动套设有控制套5,控制套5随着转动环6的移动进行移动,实现与配合柱14进行连接,底座1的左侧内壁滑动连接有按钮7,且按钮7的左侧延伸至底座1外,底座1内设有控制机构与限制机构;
28.控制机构包括控制板9、转动环6、空心板10、配合柱14、齿轮柱15、齿条17、t型板21、定位杆18、活动板26、连接杆30与启动套22,控制板9滑动连接在底座1的后侧内壁,且控制板9的左侧设有斜面,按钮7的右侧固定连接有梯形板8,按钮7通过推动杆梯形板8进行移动,方便控制梯形板8的斜面推动控制板9进行上升,从而控制转动环6进行上升,且梯形板8的斜面与控制板9相接触,转动环6转动套设在控制套5的外壁,且控制套5的左侧滑动连接在底座1的左侧内壁,控制套5的底部与控制板9的顶部固定连接,空心板10固定连接在转动环6的顶部,空心板10内滑动连接有锁定板11,空心板10起到限制锁定板11进行横向移动的作用,且锁定板11的右侧固定连接有一号弹簧12,通过一号弹簧12的弹力方便推动锁定板11进行移动,一号弹簧12的一端与空心板10的右侧内壁固定连接,底座1的左侧设有延伸孔,且延伸孔与锁定板11活动连接,配合柱14转动连接在底座1的顶部内壁,齿轮柱15转动连接在底座1的底部内壁,齿条17滑动连接在底座1的底部内壁,齿条17通过定位杆18可以
推动t型板21进行上升,实现拉动活动带28进行移动,从而控制活动板26进行移动,且齿条17与齿轮柱15相啮合,t型板21滑动连接在底座1的前侧内壁,定位杆18转动连接在t型板21的底部,且定位杆18的左端与齿条17的右侧固定连接,活动板26滑动连接在控制箱2的前侧内壁,连接杆30转动连接在活动板26的左侧,启动套22固定套设在螺纹管31的外壁,控制机构实现自动控制感应铁33进行移动的作用;t型板21的顶部固定连接有活动带28,且活动带28的一端与活动板26的左侧固定连接,控制箱2的后侧内壁转动连接有引导柱27,且引导柱27的外壁与活动带28相接触,当t型板21进行移动时,t型板21通过活动带28可以控制活动板26进行移动;启动套22的右侧转动连接有万向轮20,且万向轮20与连接杆30的左端固定连接,当连接杆30进行移动时,通过万向轮20可以控制启动套22进行转动;配合柱14的底部固定连接有与控制套5相适配的延伸柱,且配合柱14与控制套5活动连接,配合柱14的外壁与齿轮柱15的外壁固定套设有同一个传动带16,当配合柱14与控制套5进行连接时,控制套5可以带动连接柱14进行转动,同时配合柱14通过传动带16可以带动齿轮柱15进行转动;
29.限制机构包括l型板19、接触板23、三号弹簧24与搭配板25,l型板19固定连接在齿条17的顶部,接触板23滑动连接在底座1的右侧内壁,三号弹簧24固定连接在接触板23的底部,通过三号弹簧24的弹力方便推动接触板23进行回位,且三号弹簧24的一端与底座1的底部内壁固定连接,搭配板25固定连接在接触板23的顶部,限制机构起到当感应块33停止移动时,对感应块33进行固定,保证检测的效果;搭配板25的顶部固定连接有多个立板,且立板与活动板26的左侧活动接触,通过立板与活动板26进行接触,实现对活动板26的移动进行限制的作用;接触板23的顶部设有多个斜面板,且l型板19的底部设有与斜面板相适配的三角板,三角板的斜面与斜面板的斜面活动接触,当l型板19进行移动时,l型板10通过三角板与斜面板进行接触,可以推动接触板23循环向下进行移动的作用;
30.底座1的顶部内壁固定连接有二号弹簧13,且二号弹簧13的一端与转动环6的顶部固定连接,控制箱2的右侧内壁固定连接有四号弹簧29,且四号弹簧29的一端与活动板26的底部固定连接,通过二号弹簧13的弹力方便推动转动环6进行回位,通过四号弹簧29的弹力方便拉动活动板26进行回位。
31.本实施例中,实际工作时,通过按动按钮7进行移动,按钮7通过梯形板8推动控制板9进行上升,当控制板9进行上升时,控制板9通过转动环6带动空心板10进行移动,此时随着空心板10的移动,锁定板11通过一号弹簧12的弹力与延伸孔进行连接,此时锁定板11限制转动环6的移动,同时随着转动环6的移动,转动环6带动控制套5与配合柱14进行连接,此时启动电机4,电机4的输出轴通过控制套5引导配合柱14进行转动,当配合柱14进行转动时,配合柱14通过传动带16控制齿轮柱15进行转动,当齿轮柱15进行转动时,齿轮柱15通过齿纹控制齿条17向右进行移动,当齿条17进行移动时,齿条17通过定位杆18推动t型板21进行上升,当t型板21进行上升时,t型板21拉动活动带28进行移动,当活动带28进行移动时,活动带28拉动活动板26向左进行移动,此时随着活动板26的移动,活动板6推动连接杆30进行移动,当连接杆30进行移动时,连接杆30通过万向轮20推动控制启动套22进行转动,当启动套22进行转动时,启动套22控制螺纹管31进行转动,当螺纹管31进行转动时,螺纹管31通过螺纹控制螺纹柱32向左进行移动,此时螺纹柱32带动感应铁33在感应式传感器的34的表面进行移动,实现调节检测的作用,同时随着齿条17的移动,齿条17同步带动l型板19进行移动,当l型板19进行移动时,l型板19带动三角板与斜面板进行接触,此时斜面板受到压力
推动接触板23进行下降,当接触板23进行下降时,接触板23同步带动搭配板25进行下降,此时活动板26与立板脱离接触方便进行移动,当接触板23通过三号弹簧24的弹力推动搭配板25进行回位时,此时立板限制活动板26的移动,保证感应铁33在进行调节后停止进行移动,保证检测稳定性的作用。
32.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。