1.本发明属于模式识别领域,涉及一种肌电识别和功能性电刺激技术,特别涉及一种通过健侧手势肌电识别,由外骨骼机器人带动患侧肢体进行健患双侧同步动作的训练方法。并根据健侧肌电识别手势动作,对患侧相应肌肉实施功能性电刺激的镜像训练。通过计算大脑皮层左、右侧运动控制区域脑电信号μ节律时域事件相关去同步特征值之差的绝对值e,作为感觉运动皮层重塑效果的评估指标,指示患者受损的运动控制区是否通过镜像训练得到改善。经过与传统基于肌电识别的外骨骼机器人镜像训练方法对比,验证了镜像训练 功能性电刺激的方法具有更好的效果。
背景技术:
2.镜像疗法(mirror therapy,mt)作为一种常用的康复疗法,通常做法是在患者的手臂或双腿之间放置一面镜子,以促使患者通过健侧肢体运动,镜像产生患侧肢体正常运动的想象,或者在外部机械助力下完成患侧肢体与健侧肢体一样的动作。通过此种方法,可以刺激患者大脑运动感觉皮层重塑。一种较常用且效果良好的运动障碍康复训练方法是功能性电刺激(functional electrical stimulation,fes)技术,通过预先设定的电流脉冲序列从外部刺激患者运动障碍肢体肌肉,不仅可以助力患肢动作,还可改善相应动作肌群的肌梭、腱梭向神经中枢传导感觉信息,促进感觉运动皮层重塑。运动想象能够与实际运动一样激活运动相关脑皮层,促进感觉运动皮层功能的重组或重建,因而被用于脑损伤肢体瘫痪患者的主动康复训练治疗。随着肌电采集传感器的微型化,基于表面肌电信号(surface electromyography,semg)的手势识别技术由于其自然的交互方式成为了手势识别领域中的研究热点之一。目前随着采集技术及处理技术的发展,手势动作的识别准确率可以达到90%以上。脑电信号(electroencephalogram,eeg)是大脑皮层神经元群体电活动的综合效应,是诸多神经元共同活动的结果。事件相关去同步化(event related desychronization,erd)及事件相关同步化(event related synchronization,ers)现象是大量神经元活动在生理电信号上产生共振的结果,表示产生某一频段eeg对应神经元与相关神经元之间的相互作用,其erd值可以反映皮层区域神经的活跃程度。因此通过手势表面肌电信号识别出健侧动作,并根据识别结果控制患侧的外骨骼机器人完成与健侧一样的动作,同时在患侧对应肌肉上施加fes,进一步促进运动障碍的康复具有可行性,而且康复效果能通过对训练前后皮层脑电的erd特征得到验证。
技术实现要素:
3.本发明针对现有技术的不足,提出了一种基于肌电识别的功能性电刺激运动障碍镜像训练方法。
4.基于肌电识别的功能性电刺激运动障碍镜像训练方法,此方法包括如下步骤如下:
5.步骤1.将受试者按单一变量原则,将不同性别受试者随机平均分为a、b两组,人数
相等,a组采用健侧semg识别并由外骨骼机器人机械助力患侧完成镜像训练;b组通过健侧semg识别并由外骨骼机器人机械助力患侧,同时对患侧运动肢体相应肌肉给予fes刺激;上述健侧semg采集点位置和b组fes刺激位置则根据不同的肢体动作做出相应选择。
6.步骤2.对步骤1中两组受试者训练开始前,采集两组受试者双手同时做特定动作运动想象时,左中央c3区及右中央c4区的eeg信号。
7.步骤3.对步骤1已分好组别的受试者进行镜像训练。
8.步骤4.对步骤3经过一个训练周期以后,采集两组受试者双手同时做特定动作运动想象时,左中央c3区及右中央c4区的eeg信号。
9.步骤5.对步骤2、步骤4采集到的eeg数据以8~12hz频段带通滤波预处理后,并计算感觉运动皮层运动控制能力评估指标e。
10.步骤6:对比两组训练方法前后计算得到的e值,分析两种训练方法对感觉运动皮层运动控制能力的改善效果。
11.作为优选,步骤2、4的eeg数据采集具体步骤;
12.2-1.eeg数据的采集。受试者根据视频引导做运动想象,并采集c3、c4导联eeg信号。具体为:运动想象10s后休息10s,共记录10组数据。
13.作为优选,步骤3镜像训练的具体步骤;
14.患侧固定于外骨骼机器人上,通过外骨骼机器人带动患侧手臂完成相应动作;健侧手臂放置肌电采集装置。训练时,a组受试者双手同时做动作,健侧手臂实际执行此动作,而患侧由于运动功能障碍,动作执行不够到位。此时通过采集健侧的semg信号,识别出相应手势动作,控制外骨骼机器人带动患侧进行相应的手势动作。b组受试者在a组基础上同时对患侧“动作的肌肉施加功能性电刺激。受试者均于每天固定时间如上午9:00固定时间进行镜像训练,每次持续20min,每天1次,每周训练5天,连续训练4周。
15.作为优选,评估指标e的计算分析方法如下:
16.滤波后计算所有eeg采样值的均值,并计算差分平方的均值;
[0017][0018]
式(1)中x
ij
为第i次实验进行第j次采样的值,n为实验的次数,aj为第j次采样差分平方的均值,表示为所有组别的第j次采样的平均值;
[0019]
计算能量变化率erd;
[0020][0021][0022]
式(2)中[r,s]为静息区间,r为静息区间所有采样值差分平方的均值;式(3)中[m,n]为运动想象区间。
[0023]
计算c3、c4导联erd之差绝对值e;
[0024]ei
=|erd
c3i-erd
c4i
|
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0025]
式(4)中,erd
c3i
为c3导联第i次采样的能量变化率,erd
c4i
为c4导联第i次采样的能量变化率;ei即为每个组感觉运动皮层控制能力改善的评估指标。
[0026]
作为优选,还包括根据每组受试者训练前后算得的评估标准e,用t检验做差异性
显著分析;
[0027]
具体为:计算两组镜像训练前之间的p值,若p》0.05,则两组数据不具有统计学差异,可视为同一组。根据两组镜像训练前后算得的ei均值e,分别进行组内训练前后对比和组间对比。组内比较时,若镜像训练前后e有下降,且具备统计学差异,p《0.05,则说明此训练方法对感觉运动皮层控制能力改善有效果。组间比较时,若训练后,b组的评估指标e明显小于a组的评估指标e,且两组数据具备统计学差异,p《0.05,则说明b组训练方法较a组训练方法对感觉运动皮层控制能力改善更有效。
[0028]
本发明相对于现有技术的效果:通过健侧手势肌电识别,由外骨骼机器人带动患侧肢体进行健患双侧同步动作,并对患侧对应肌肉施加fes刺激的训练方法,相较于现有的训练方法,对大脑运动感觉皮层活跃度的激活效果更好,能更有效地改善感觉运动皮层的控制能力。同时,通过eeg分析,从神经可塑性角度评价训练效果,是一种同样方便、有效的方式。
附图说明
[0029]
图1为本发明实施的原理框图;
[0030]
图2为本发明实例采集脑电信号位置分布图;
[0031]
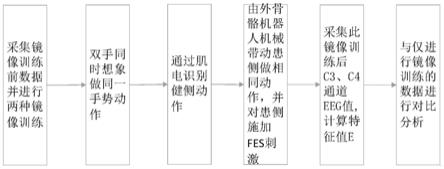
图3为本发明实例的实验范式;
具体实施方式
[0032]
下面结合附图对本发明的实例作详细说明:本实例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程。
[0033]
如图1所示,本实施例包括如下步骤:
[0034]
步骤1,训练前,采集两组受试者双侧同时做“屈肘”运动想象时c3、c4导联的eeg值。c3、c4导联采集位置如图2所示。具体过程如下:
[0035]
被试坐在扶椅正中,由显示屏播放“屈肘”动作的视频引导被试双手同时做“屈肘”运动想象,并采集c3、c4导联eeg信号。具体为:运动想象10s后休息10s,共记录10组数据,作为两组训练前的原始数据。
[0036]
步骤2,将受试者按单一变量原则,按不同性别受试者随机平均分为a、b两组,使每组相同性别的人数相等,a组采用健侧semg识别并由外骨骼机器人机械助力患侧完成训练;b组为通过健侧semg识别并由外骨骼机器人机械助力患侧,同时对患侧运动肢体相应肌肉给予fes刺激。具体周期及训练方法如下:
[0037]
受试者患侧固定于外骨骼机器人上,通过外骨骼机器人带动患侧手臂完成相应动作。健侧手臂放置肌电采集装置。训练时,受试者双手同时做“屈肘”动作,健侧手臂实际执行此动作,而患侧由于运动功能障碍,动作执行不够到位。此时通过采集健侧的semg信号,识别出相应手势动作,控制外骨骼机器人带动患侧进行相应的手势动作。b组同时对患侧“屈肘”动作的肌肉施加功能性电刺激。
[0038]
a组被试接受机械助力镜像训练,b组被试接受机械助力 fes刺激镜像训练,a、b两组被试均于每天固定时间如上午9:00进行镜像训练,每次持续20min,每天1次,每周训练5天,连续训练4周。
[0039]
步骤3,训练完成后,同步骤1,采集两组受试者镜像训练后双手做“屈肘运动想象”下c3、c4导联的eeg值。总体实验流程如图3所示。
[0040]
步骤4,对两组镜像训练前后采集到的数据进行处理,计算得到控制能力评估指标e如表1所示,通过结果进行对比分析,验证此发明基于肌电识别的功能性电刺激运动障碍镜像训练方法有效;
[0041]
表1
[0042][0043]
具体分析如下:
[0044]
根据表1,分别为a、b两组进行训练前后e的平均值。a、b组内镜像训练前后对比,在训练前,a组被试μ节律下经过四周机械助力镜像训练后b组被试μ节律下经过四周机械助力 fes刺激镜像训练后明显的,a组机械助力镜像训练方法和b组机械助力 fes刺激镜像训练方法对患侧感觉运动皮层重塑均有效果。a、b两组训练前后组间对比,a、b两组训练前的评估指标e经过t检验做差异性分析发现,训练前两组不具有统计学差异(p》0.05),可以视为同一组。经过一个周期的不同训练以后,a、b两组的评估指标e均有改善,同时b组对单侧运动功能障碍患者感觉运动皮层重塑效果最好,如表2所示。基于此,本文提出的基于肌电识别的功能性电刺激运动障碍镜像训练方法对单侧运动功能障碍患者的有效,且效果较肌电识别机械助力的镜像训练方法效果更好;
[0045]
表2
[0046][0047]
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。