一种基于六轴外固定支架的骨骼正畸电子处方构建方法
1.本发明涉及骨骼畸形矫正技术领域,特别是涉及一种基于六轴外固定支架的骨骼正畸电子处方构建方法。
背景技术:
2.六轴外固定支架作为一种典型的先进环形外固定器,自泰勒兄弟1994年设计成品以来,已被全球矫形外科医生广泛采用。该六轴外固定支架是一种改进的ilizarov机架,它由两个环组成,在万向节处由六个可调伸缩螺杆连接。这使得外固定架能够像六足机器人一样同时矫正复杂的多维度畸形。医生可以在计算机辅助下精确地控制矫正过程。
3.治疗算法是对基于六轴外固定支架的治疗过程的规划,目前,对于不同矫正模式下的电子处方及其相应的矫正治疗算法的研究较少。临床进行畸形矫正时,治疗算法的选择往往受到矫正模式的困扰,因为它严重依赖于对疾病类型的诊断,十分耗时。同时,多种复杂的矫正模式也会造成治疗冗余,过多的人工诊断和人工测量更是影响了治疗精度。
技术实现要素:
4.为克服现有治疗算法的上述缺陷,本发明提出了一种基于六轴外固定支架的骨骼正畸电子处方构建方法。该治疗算法基于支架安装和参数测量的执行顺序,更符合临床实际需求,可以有效地纠正不同类型的畸形,同时减少一些诊断测量,削弱了人工诊断误差的影响。
5.为了实现上述目的,本发明提供了一种基于六轴外固定支架的骨骼正畸电子处方构建方法,六轴外固定支架由近端环、远端环以及用于连接近端环、远端环的六根螺杆组成,其中,近端环用于固定断骨的近端骨段,远端环用于固定断骨的远端骨段;
6.骨骼畸形治疗算法,包括以下步骤:
7.s101.采集断骨的第一骨骼畸形参数、近端环的第一移位安装参数、远端环的第二移位安装参数,获取近端骨段与远端骨段的第一位姿关系,近端骨段与近端环的第二位姿关系,远端骨段与近端环的第三位姿关系;
8.s102.基于第一位姿关系、第二位姿关系、第三位姿关系,根据逆运动学算法,获得六根螺杆的第一长度;
9.s103.采集断骨矫正后的目标骨骼参数,根据第一骨骼畸形参数获取参数变化范围,通过定义畸形矫治速度并对参数变化范围进行插值,获得若干个连续的矫治状态以及每个矫治状态对应的第二骨骼畸形参数;
10.s104.基于第二骨骼畸形参数,根据s101-s102的方法,获取每个矫治状态对应的每根螺杆的第二长度,并根据畸形矫治速度、第二长度,构建用于对断骨进行骨骼畸形治疗的电子处方。
11.优选地,在采集断骨的第一骨骼畸形参数的过程中,根据x线正侧位片或临床检查测量,获取第一骨骼畸形参数;
12.以近端骨段为参考点,获取第一位姿关系。
13.优选地,在获取第一长度的过程中,还包括以下步骤:
14.s2001.以断骨的骨断端中点为原点,分别建立近端骨段的第一坐标系和远端骨段的第二坐标系;
15.s2002.以近端环和远端环的几何中心为原点,分别建立近端环的第三坐标系和远端环的第四坐标系;
16.s2003.基于第一坐标系,根据第二坐标系获取第一位姿关系;
17.s2004.根据第一坐标系和第三坐标系获取第二位姿关系;根据第二坐标系和第四坐标系获取第三位姿关系;
18.s2005.采集第三坐标系的第一螺杆连接点矢量以及第四坐标系的第二螺杆连接点矢量;
19.s2006.根据第一位姿关系、第一螺杆连接点矢量,获取近端环的第一螺杆连接点到近端骨段的第一坐标系矢量;
20.s2007.根据第二螺杆连接点矢量、第二位姿关系、第三位姿关系,获取远端环的第二螺杆连接点到远端骨段的第二坐标系矢量;
21.s2008.通过对第一坐标系矢量和第二坐标系矢量分别去绝对值后进行解算,获取第一长度。
22.优选地,第一位姿关系的表达式为:
[0023][0024]
第二位姿关系的表达式为:
[0025]mih1b1
=t
h1b1mih1
(i=1~6);
[0026]
第三位姿关系的表达式为:
[0027]mih2b1
=t
b2b1
t
h2b2
t
h1b1mih2
(i=1~6);
[0028]
第一长度的表达式为:
[0029]
li=||m
ih1b1-m
ih2b1
||=||t
h1b1mih1-t
b2b1
t
h2b2
t
h1b1mih2
||(i=1~6);
[0030]
其中,m、u表示环上各螺杆连接点在各坐标系下矢量,可利用环结构尺寸求得,r表示移位参数矩阵,a表示成角参数矩阵,t表示位姿关系矩阵,h1表示支架近端环,h2表示支架远端环,b1表示近端骨段,b2则表示远段骨段。
[0031]
优选地,在采集断骨的第一骨骼畸形参数的过程中,还包括以下步骤:
[0032]
基于近端骨段、远端骨段,组装六轴外固定支架;
[0033]
采集每根螺杆的第一长度,根据正运动学算法,以近端骨段为参考点,获取近端环与远端环的第四位姿关系;
[0034]
根据第一移位安装参数、第二移位安装参数,获取第二位姿关系、第三位姿关系;
[0035]
基于第四位姿关系、第二位姿关系、第三位姿关系,获取第一骨骼畸形参数。
[0036]
优选地,在获取第一骨骼畸形参数的过程中,还包括以下步骤:
[0037]
s3001.采集近端环的第一移位安装参数、旋转安装参数,并利用六轴外固定支架在中位状态下的高度,获取远端环的第二移位安装参数;
[0038]
s3002.根据第一移位安装参数、第二移位安装参数、旋转安装参数,获得第四位姿
关系;
[0039]
s3003.根据第一移位安装参数,获取第二位姿关系,根据第二位移安装参数,获取第三位姿关系;
[0040]
s3004.根据第二位姿关系、第三位姿关系、第四位姿关系,获取第一骨骼畸形参数。
[0041]
优选地,第四位姿关系的表达式为:
[0042]rh1h2
=t
h1h2uh1
;
[0043]
第二位姿关系的表达式为:
[0044][0045]
第三位姿关系的表达式为:
[0046][0047]
第一骨骼畸形参数的表达式为:
[0048]rb2b1
=t
h1b1
t
h1h2
t
h2b2ub2
;
[0049]
其中,m、u表示环上各螺杆连接点在各坐标系下矢量,可利用环结构尺寸求得,r表示移位参数矩阵,a表示成角参数矩阵,t表示位姿关系矩阵。
[0050]
优选地,第一骨骼畸形参数包括移位畸形参数、成角畸形参数、旋转畸形参数。
[0051]
用于实现骨骼正畸电子处方构建方法的骨骼正畸电子处方构建系统,包括,
[0052]
数据采集模块,用于采集断骨的第一骨骼畸形参数、近端环的第一移位安装参数、远端环的第二移位安装参数,其中,根据x线正侧位片或临床检查测量,获取第一骨骼畸形参数;
[0053]
第一数据处理模块,用于获取近端骨段与远端骨段的第一位姿关系,近端骨段与近端环的第二位姿关系,远端骨段与近端环的第三位姿关系;
[0054]
第二数据处理模块,用于基于第一位姿关系、第二位姿关系、第三位姿关系,根据逆运动学算法,获得六根螺杆的第一长度;
[0055]
矫治状态构建模块,用于采集断骨矫正后的目标骨骼参数,根据第一骨骼畸形参数获取参数变化范围,通过定义畸形矫治速度并对参数变化范围进行插值,获得若干个连续的矫治状态以及每个矫治状态对应的第二骨骼畸形参数;
[0056]
处方编辑模块,用于基于第二骨骼畸形参数,根据第一数据处理模块和第二数据处理模块,获取每个矫治状态对应的每根螺杆的第二长度,并根据畸形矫治速度、第二长度,构建用于对断骨进行骨骼畸形治疗的电子处方。
[0057]
优选地,数据采集模块,还用于以断骨的骨断端中点为原点,分别建立近端骨段的第一坐标系和远端骨段的第二坐标系;
[0058]
以近端环和远端环的几何中心为原点,分别建立近端环的第三坐标系和远端环的第四坐标系;
[0059]
基于第一坐标系,根据第二坐标系获取第一位姿关系;
[0060]
根据第一坐标系和第三坐标系获取第二位姿关系;根据第二坐标系和第四坐标系
获取第三位姿关系;
[0061]
采集第三坐标系的第一螺杆连接点矢量以及第四坐标系的第二螺杆连接点矢量;
[0062]
根据第一位姿关系、第一螺杆连接点矢量,获取近端环的第一螺杆连接点到近端骨段的第一坐标系矢量;
[0063]
根据第二螺杆连接点矢量、第二位姿关系、第三位姿关系,获取远端环的第二螺杆连接点到远端骨段的第二坐标系矢量;
[0064]
通过对第一坐标系矢量和第二坐标系矢量分别去绝对值后进行解算,获取第一长度。
[0065]
本发明公开了以下技术效果:
[0066]
本发明相对于现有技术,优势在于:更符合临床实际需求和操作,可以有效地纠正畸形。同时,在治疗优先模式下减少了对畸形参数的测量,削弱了人工测量误差对处方精度和畸形矫正效果的影响。
附图说明
[0067]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还根据这些附图获得其他的附图。
[0068]
图1为本发明所述的六轴外固定支架示意图;
[0069]
图2为本发明所述的骨骼畸形参数示意图;
[0070]
图3为本发明所述的移位安装参数示意图;
[0071]
图4为本发明示意图,a为测量优先示意图,b为治疗优先示意图;
[0072]
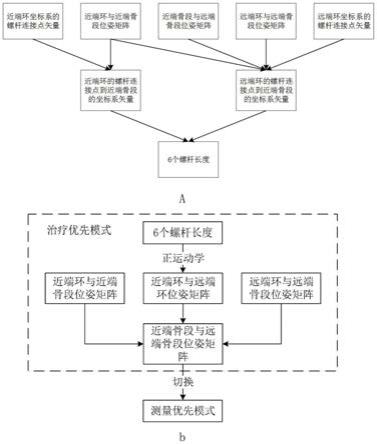
图5为本发明原理框图,a为测量优先示意图,b为治疗优先示意图;
[0073]
图中1.近端骨段,2.近端环,3.螺杆,4.远端环,5.远端骨段。
具体实施方式
[0074]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0075]
如图1-5所示,本发明提供了一种基于六轴外固定支架的骨骼正畸电子处方构建方法,六轴外固定支架由近端环2、远端环4以及用于连接近端环2、远端环4的六根螺杆3组成,其中,近端环2用于固定断骨的近端骨段1,远端环4用于固定断骨的远端骨段5;
[0076]
骨骼畸形治疗算法,包括以下步骤:
[0077]
s101.采集断骨的第一骨骼畸形参数、近端环2的第一移位安装参数、远端环4的第二移位安装参数,获取近端骨段1与远端骨段5的第一位姿关系,近端骨段1与近端环2的第二位姿关系,远端骨段5与近端环2的第三位姿关系;
[0078]
s102.基于第一位姿关系、第二位姿关系、第三位姿关系,根据逆运动学算法,获得六根螺杆3的第一长度;
[0079]
s103.采集断骨矫正后的目标骨骼参数,根据第一骨骼畸形参数获取参数变化范围,通过定义畸形矫治速度并对参数变化范围进行插值,获得若干个连续的矫治状态以及每个矫治状态对应的第二骨骼畸形参数;
[0080]
s104.基于第二骨骼畸形参数,根据s101-s102的方法,获取每个矫治状态对应的每根螺杆3的第二长度,并根据畸形矫治速度、第二长度,构建用于对断骨进行骨骼畸形治疗的电子处方。
[0081]
进一步地,在采集断骨的第一骨骼畸形参数的过程中,根据x线正侧位片或临床检查测量,获取第一骨骼畸形参数;
[0082]
以近端骨段1为参考点,获取第一位姿关系。
[0083]
进一步地,在获取第一长度的过程中,还包括以下步骤:
[0084]
s2001.以断骨的骨断端中点为原点,分别建立近端骨段1的第一坐标系和远端骨段5的第二坐标系;
[0085]
s2002.以近端环2和远端环4的几何中心为原点,分别建立近端环2的第三坐标系和远端环4的第四坐标系;
[0086]
s2003.基于第一坐标系,根据第二坐标系获取第一位姿关系;
[0087]
s2004.根据第一坐标系和第三坐标系获取第二位姿关系;根据第二坐标系和第四坐标系获取第三位姿关系;
[0088]
s2005.采集第三坐标系的第一螺杆连接点矢量以及第四坐标系的第二螺杆连接点矢量;
[0089]
s2006.根据第一位姿关系、第一螺杆连接点矢量,获取近端环2的第一螺杆连接点到近端骨段1的第一坐标系矢量;
[0090]
s2007.根据第二螺杆连接点矢量、第二位姿关系、第三位姿关系,获取远端环4的第二螺杆连接点到远端骨段5的第二坐标系矢量;
[0091]
s2008.通过对第一坐标系矢量和第二坐标系矢量分别去绝对值后进行解算,获取第一长度。
[0092]
进一步地,第一位姿关系的表达式为:
[0093][0094]
第二位姿关系的表达式为:
[0095]mih1b1
=t
h1b1mih1
(i=1~6);
[0096]
第三位姿关系的表达式为:
[0097]mih2b1
=t
b2b1
t
h2b2
t
h1b1mih2
(i=1~6);
[0098]
第一长度的表达式为:
[0099]
li=||m
ih1b1-m
ih2b1
||=||t
h1b1mih1-t
b2b1
t
h2b2
t
h1b1mih2
||(i=1~6);
[0100]
其中,m、u表示环上各螺杆连接点在各坐标系下矢量,可利用环结构尺寸求得,r表示移位参数矩阵,a表示成角参数矩阵,t表示位姿关系矩阵,h1表示支架近端环,h2表示支架远端环,b1表示近端骨段,b2则表示远段骨段。
[0101]
进一步地,在采集断骨的第一骨骼畸形参数的过程中,还包括以下步骤:
[0102]
基于近端骨段1、远端骨段5,组装六轴外固定支架;
[0103]
采集每根螺杆3的第一长度,根据正运动学算法,以近端骨段1为参考点,获取近端环2与远端环4的第四位姿关系;
[0104]
根据第一移位安装参数、第二移位安装参数,获取第二位姿关系、第三位姿关系;
[0105]
基于第四位姿关系、第二位姿关系、第三位姿关系,获取第一骨骼畸形参数。
[0106]
进一步地,在获取第一骨骼畸形参数的过程中,还包括以下步骤:
[0107]
s3001.采集近端环1的第一移位安装参数、旋转安装参数,并利用六轴外固定支架在中位状态下的高度,获取远端环4的第二移位安装参数;
[0108]
s3002.根据第一移位安装参数、第二移位安装参数、旋转安装参数,获得第四位姿关系;
[0109]
s3003.根据第一移位安装参数,获取第二位姿关系,根据第二位移安装参数,获取第三位姿关系;
[0110]
s3004.根据第二位姿关系、第三位姿关系、第四位姿关系,获取第一骨骼畸形参数。
[0111]
进一步地,第四位姿关系的表达式为:
[0112]rh1h2
=t
h1h2uh1
;
[0113]
第二位姿关系的表达式为:
[0114][0115]
第三位姿关系的表达式为:
[0116][0117]
第一骨骼畸形参数的表达式为:
[0118]rb2b1
=t
h1b1
t
h1h2
t
h2b2ub2
;
[0119]
其中,m、u表示环上各螺杆连接点在各坐标系下矢量,可利用环结构尺寸求得,r表示移位参数矩阵,a表示成角参数矩阵,t表示位姿关系矩阵。
[0120]
进一步地,第一骨骼畸形参数包括移位畸形参数、成角畸形参数、旋转畸形参数。
[0121]
进一步地,用于实现骨骼正畸电子处方构建方法的骨骼正畸电子处方构建系统,包括,
[0122]
数据采集模块,用于采集断骨的第一骨骼畸形参数、近端环2的第一移位安装参数、远端环4的第二移位安装参数,其中,根据x线正侧位片或临床检查测量,获取第一骨骼畸形参数;
[0123]
第一数据处理模块,用于获取近端骨段1与远端骨段5的第一位姿关系,近端骨段1与近端环2的第二位姿关系,远端骨段5与近端环2的第三位姿关系;
[0124]
第二数据处理模块,用于基于第一位姿关系、第二位姿关系、第三位姿关系,根据逆运动学算法,获得六根螺杆3的第一长度;
[0125]
矫治状态构建模块,用于采集断骨矫正后的目标骨骼参数,根据第一骨骼畸形参
数获取参数变化范围,通过定义畸形矫治速度并对参数变化范围进行插值,获得若干个连续的矫治状态以及每个矫治状态对应的第二骨骼畸形参数;
[0126]
处方编辑模块,用于基于第二骨骼畸形参数,根据第一数据处理模块和第二数据处理模块,获取每个矫治状态对应的每根螺杆3的第二长度,并根据畸形矫治速度、第二长度,构建用于对断骨进行骨骼畸形治疗的电子处方。
[0127]
进一步地,数据采集模块,还用于以断骨的骨断端中点为原点,分别建立近端骨段1的第一坐标系和远端骨段5的第二坐标系;
[0128]
以近端环2和远端环4的几何中心为原点,分别建立近端环2的第三坐标系和远端环4的第四坐标系;
[0129]
基于第一坐标系,根据第二坐标系获取第一位姿关系;
[0130]
根据第一坐标系和第三坐标系获取第二位姿关系;根据第二坐标系和第四坐标系获取第三位姿关系;
[0131]
采集第三坐标系的第一螺杆连接点矢量以及第四坐标系的第二螺杆连接点矢量;
[0132]
根据第一位姿关系、第一螺杆连接点矢量,获取近端环2的第一螺杆连接点到近端骨段1的第一坐标系矢量;
[0133]
根据第二螺杆连接点矢量、第二位姿关系、第三位姿关系,获取远端环4的第二螺杆连接点到远端骨段5的第二坐标系矢量;
[0134]
通过对第一坐标系矢量和第二坐标系矢量分别去绝对值后进行解算,获取第一长度。
[0135]
实施例1:本发明是一种基于六轴外固定支架的骨骼正畸电子处方构建方法。其特征在于:由两大部分组成,包括测量优先算法和治疗优先算法。
[0136]
所述测量优先算法,其主要参数有骨骼畸形参数,近端环移位安装参数,远端环移位安装参数,首先通过骨骼畸形参数计算远近端骨的位姿关系矩阵,再通过近端环移位安装参数计算近端骨与近端环的位姿关系矩阵,通过远端环移位安装参数计算远端骨与远端环的位姿关系矩阵。以近端骨与近端环的位姿关系矩阵和近端环坐标系内的矢量计算近端环坐标系与近端骨坐标系的矢量关系。以远近骨位姿关系矩阵、远端骨与远端环的位姿关系矩阵和远端环坐标系内的矢量计算远端环坐标系与近端骨坐标系的矢量关系。两种矢量关系通过逆运动学运算即可计算出6根螺杆的长度。根据治疗前所测量的骨骼畸形参数和治疗目标可形成畸形参数的数值变化范围,通过定义畸形矫治速度并对数值范围进行插值可获得若干个连续的矫治状态并得到对应的畸形参数,利用上述方法可确定每个矫治状态下六轴外固定支架的螺杆长度,即用于指导支架调整以实现畸形矫治的电子处方。
[0137]
所述治疗优先算法,其主要参数有6根螺杆的长度、近端环移位安装参数、远端环移位安装参数。首先基于6根螺杆的长度以正运动学计算出远近端环的位姿关系矩阵、通过近端环移位安装参数计算近端骨与近端环的位姿关系矩阵,通过远端环移位安装参数计算远端骨与远端环的位姿关系矩阵。将三个位姿关系矩阵进行关系运算即可求解出远近端骨的位姿关系矩阵,进而得出骨骼畸形参数。将此畸形参数作为初值,将矫正后的目标畸形参数作为终值,插值后采用测量优先方法即可得出电子处方。
[0138]
实施例2:本发明公开的一种基于六轴外固定支架的骨骼正畸电子处方构建方法,由两大部分组成:测量优先算法、治疗优先算法。二者根据临床实际需求,分别提供了不同
使用模式下的骨骼畸形矫正方案。
[0139]
六轴外固定支架以并联机构为本体,通过调节连接远、近固定环的6根螺杆长度即可改变与支架固连的骨段之间的相对位姿,实现对多平面中包括移位、成角和旋转等畸形的同步矫治。
[0140]
测量优先算法通过测量骨骼畸形参数,近端环移位安装参数与远端环移位安装参数,进而计算出远、近骨段的位姿关系,近端骨与近端环的位姿关系,远端骨与远端环的位姿关系,最终以z算法求解,获得6根螺杆的长度。根据治疗前所测量的骨骼畸形参数和治疗目标可形成畸形参数的数值变化范围,通过定义畸形矫治速度并对数值范围进行插值可获得若干个连续的矫治状态并得到对应的畸形参数,利用上述方法可确定每个矫治状态下六轴外固定支架的螺杆长度,即用于指导支架调整以实现畸形矫治的电子处方。
[0141]
治疗优先算法则免于对骨骼畸形参数的直接测量,而是通过测量6根螺杆长度,再使用正运动学计算近端环与远端环的位姿关系,根据近端环移位安装参数与远端环移位安装参数计算近端骨与近端环的位姿关系,远端骨与远端环的位姿关系,最终根据三个位姿关系求得骨骼畸形参数。据此畸形参数和矫正后的目标畸形参数,采用测量优先方法即可得出电子处方。
[0142]
下面结合附图对一种基于六轴外固定支架的骨骼正畸电子处方构建方法做进一步的说明。
[0143]
如图1所示近端骨段1被近端环2固定,远端骨段5被远端环2固定,近端环1与远端环2由螺杆3连接。
[0144]
如图2、图3所示,以骨断端中点为原点分别建立远近骨段坐标系x
b2yb2zb2
和x
b1yb1zb1
,同时以两环几何中心为原点分别建立两环坐标系x
h1yh1zh1
和x
h2yh2zh2
,且都以近端为参考。则骨骼畸形参数包括移位畸形参数x1、y1、z1,成角畸形参数α1、β1和旋转畸形参数γ1。移位安装参数包括近端环移位安装参数x2、y2、z2,近端环旋转安装参数γ2。同时利用支架中位状态下的高度可根据z2计算获得远端环移位安装参数z3。
[0145]
如图4的a图中,在测量优先模式下,首先测量骨骼畸形参数和机架参数,并在术前确定移位安装参数。建立如图2、图3所示的远端骨段5、近端骨段1和远端环4、近端环2的坐标系后,以近端骨段1为参考,有6个畸形参数,包括移位x1、y1、z1和成角α1、β1,通过对六轴外固定支架的运动学分析,以及x线正侧位片或临床检查测量出γ1,可按式(1)描述远近骨段坐标系的位姿关系。同时,通过式(2)和式(3)还可以用5个移位安装参数,其中移位x2、y2、z2、z3和成角γ2来描述各环及其对应骨段之间的平移和旋转。因此,通过式(4)可以计算出近端骨段1坐标系与近端环2坐标系之间的位姿关系,式(5)可以计算出近端骨段1坐标系与远端环4坐标系之间的位姿关系。根据式(6)可以得到每个伸缩杆在初始状态下的长度。最后根据治疗前所测量的骨骼畸形参数和治疗目标可形成畸形参数的数值变化范围,通过定义畸形矫治速度并对数值范围进行插值可获得若干个连续的矫治状态并得到对应的畸形参数,利用上述方法可确定每个矫治状态下六轴外固定支架的螺杆长度,即用于指导支架调整以实现畸形矫治的电子处方。
[0146]
[0147][0148][0149]mih1b1
=t
h1b1mih1
(i=1~6)
ꢀꢀꢀꢀꢀ
(4)
[0150]mih2b1
=t
b2b1
t
h2b2
t
h1b1
mih2(i=1~6)
ꢀꢀꢀꢀꢀ
(5)
[0151]
li=||m
ih1b1-m
ih2b1
||=||t
h1b1mih1-t
b2b1
t
h2b2
t
h1b1mih2
||(i=1~6)
ꢀꢀꢀꢀꢀꢀꢀ
(6)
[0152]
式中,m、u表示环上各螺杆连接点在各坐标系下矢量,可利用环结构尺寸求得。r表示移位参数矩阵,a表示成角参数矩阵,t表示位姿关系矩阵。
[0153]
测量优先算法原理框图如图5的a图所示,其初始主要需要三个位姿关系矩阵,分别是远端骨段5和远端环4、近端骨段1和近端环2、近端骨段1和远端骨段5,根据位姿关系矩阵得到远端环4和近端环2的螺杆连接点到近端骨段1的坐标系矢量m,进而通过对矢量取绝对值,解算6个螺杆3的长度矢量。
[0154]
如图4的b图,在治疗优先模式下,可以在远近骨段处直接组装六轴外固定支架,只需测量6个螺杆3的长度和移位x2、y2、z2、z3与成角γ2等安装参数。与其他模式相比,治疗优先模式可以通过改进的计算方法间接获得畸形参数,从而避免了畸形参数的测量,大大简化了诊断程序。基于正运动学分析,可以基于6个螺杆3的长度得到两个环之间的位姿关系式(7)。远端环4和近端环2与其对应的骨段之间的关系式(8)、(9)可以基于安装参数来确定。然后在式(10)中得到由平移坐标x
213
,y
213
,z
213
和角坐标α
213
,β
213
,γ
213
组成的矩阵t
213
。这些坐标表示矫正前的骨骼畸形参数。最终,根据计算出的骨骼畸形参数和矫正目标畸形参数,可将电子处方作为测量优先模式进行计算。
[0155]rh1h2
=t
h1h2uh1
ꢀꢀ
(7)
[0156][0157][0158]rb2b1
=t
h1b1
t
h1h2
t
h2b2ub2
ꢀꢀ
(10)
[0159]
式中,m、u表示环上各螺杆连接点在各坐标系下矢量,可利用环结构尺寸求得。r表示移位参数矩阵,a表示成角参数矩阵,t表示位姿关系矩阵。
[0160]
治疗优先算法原理框图如图5的b图所示,其初始主要需要三个位姿关系矩阵,分别是远端骨段5和远端环4、近端骨段1和近端环2,以及通过正运动学算法和6个螺杆3的长度计算的近端环2和远端环4的位姿关系矩阵,根据三个位姿关系矩阵得到近端骨段1和远端骨段5的位姿关系矩阵,进而转换为测量优先模式计算。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。