技术特征:
1.一种基于六轴外固定支架的骨骼正畸电子处方构建方法,其特征在于,所述六轴外固定支架由近端环(2)、远端环(4)以及用于连接所述近端环(2)、所述远端环(4)的六根螺杆(3)组成,其中,所述近端环(2)用于固定断骨的近端骨段(1),所述远端环(4)用于固定所述断骨的远端骨段(5);所述骨骼畸形治疗算法,包括以下步骤:s101.采集所述断骨的第一骨骼畸形参数、所述近端环(2)的第一移位安装参数、所述远端环(4)的第二移位安装参数,获取所述近端骨段(1)与所述远端骨段(5)的第一位姿关系,所述近端骨段(1)与所述近端环(2)的第二位姿关系,所述远端骨段(5)与所述近端环(2)的第三位姿关系;s102.基于所述第一位姿关系、所述第二位姿关系、所述第三位姿关系,根据逆运动学算法,获得六根所述螺杆(3)的第一长度;s103.采集断骨矫正后的目标骨骼参数,根据所述第一骨骼畸形参数获取参数变化范围,通过定义畸形矫治速度并对所述参数变化范围进行插值,获得若干个连续的矫治状态以及每个所述矫治状态对应的第二骨骼畸形参数;s104.基于所述第二骨骼畸形参数,根据所述s101-s102的方法,获取每个所述矫治状态对应的每根所述螺杆(3)的第二长度,并根据所述畸形矫治速度、所述第二长度,构建用于对所述断骨进行骨骼畸形治疗的电子处方。2.根据权利要求1所述的一种基于六轴外固定支架的骨骼正畸电子处方构建方法,其特征在于,在采集所述断骨的所述第一骨骼畸形参数的过程中,根据x线正侧位片或临床检查测量,获取所述第一骨骼畸形参数;以所述近端骨段(1)为参考点,获取所述第一位姿关系。3.根据权利要求1所述的一种基于六轴外固定支架的骨骼正畸电子处方构建方法,其特征在于,在采集所述断骨的所述第一骨骼畸形参数的过程中,还包括以下步骤:基于所述近端骨段(1)、所述远端骨段(5),组装所述六轴外固定支架;采集每根所述螺杆(3)的所述第一长度,根据正运动学算法,以所述近端骨段(1)为参考点,获取所述近端环(2)与所述远端环(4)的第四位姿关系;根据所述第一移位安装参数、所述第二移位安装参数,获取所述第二位姿关系、所述第三位姿关系;基于所述第四位姿关系、所述第二位姿关系、所述第三位姿关系,获取所述第一骨骼畸形参数。4.根据权利要求2或3任一权利要求所述的一种基于六轴外固定支架的骨骼正畸电子处方构建方法,其特征在于,所述第一骨骼畸形参数包括移位畸形参数、成角畸形参数、旋转畸形参数。5.根据权利要求2所述的一种基于六轴外固定支架的骨骼正畸电子处方构建方法,其特征在于,在获取所述第一长度的过程中,还包括以下步骤:s2001.以所述断骨的骨断端中点为原点,分别建立所述近端骨段(1)的第一坐标系和
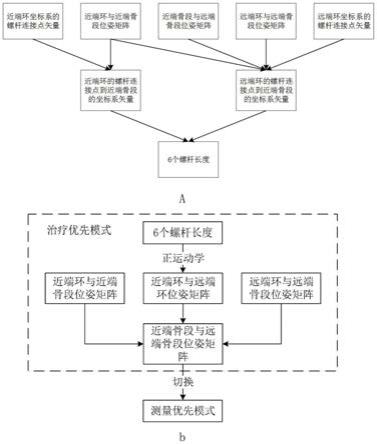
所述远端骨段(5)的第二坐标系;s2002.以所述近端环(2)和所述远端环(4)的几何中心为原点,分别建立所述近端环(2)的第三坐标系和所述远端环(4)的第四坐标系;s2003.基于所述第一坐标系,根据所述第二坐标系获取所述第一位姿关系;s2004.根据所述第一坐标系和所述第三坐标系获取所述第二位姿关系;根据所述第二坐标系和所述第四坐标系获取所述第三位姿关系;s2005.采集所述第三坐标系的第一螺杆连接点矢量以及所述第四坐标系的第二螺杆连接点矢量;s2006.根据所述第一位姿关系、所述第一螺杆连接点矢量,获取近端环(2)的第一螺杆连接点到所述近端骨段(1)的第一坐标系矢量;s2007.根据所述第二螺杆连接点矢量、所述第二位姿关系、所述第三位姿关系,获取远端环(4)的第二螺杆连接点到所述远端骨段(5)的第二坐标系矢量;s2008.通过对所述第一坐标系矢量和所述第二坐标系矢量分别去绝对值后进行解算,获取所述第一长度。6.根据权利要求3所述的一种基于六轴外固定支架的骨骼正畸电子处方构建方法,其特征在于,在获取所述第一骨骼畸形参数的过程中,还包括以下步骤:s3001.采集所述近端环(1)的所述第一移位安装参数、旋转安装参数,并利用所述六轴外固定支架在中位状态下的高度,获取所述远端环(4)的所述第二移位安装参数;s3002.根据所述第一移位安装参数、所述第二移位安装参数、所述旋转安装参数,获得所述第四位姿关系;s3003.根据所述第一移位安装参数,获取所述第二位姿关系,根据所述第二位移安装参数,获取所述第三位姿关系;s3004.根据所述第二位姿关系、所述第三位姿关系、所述第四位姿关系,获取所述第一骨骼畸形参数。7.根据权利要求5所述的一种基于六轴外固定支架的骨骼正畸电子处方构建方法,其特征在于,所述第一位姿关系的表达式为:所述第二位姿关系的表达式为:m
ih1b1
=t
h1b1
m
ih1
(i=1~6);所述第三位姿关系的表达式为:m
ih2b1
=t
b2b1
t
h2b2
t
h1b1
m
ih2
(i=1~6);所述第一长度的表达式为:l
i
=||m
ih1b1-m
ih2b1
||=||t
h1b1
m
ih1-t
b2b1
t
h2b2
t
h1b1
m
ih2
||(i=1~6);其中,m、u表示环上各螺杆连接点在各坐标系下矢量,可利用环结构尺寸求得,r表示移位参数矩阵,a表示成角参数矩阵,t表示位姿关系矩阵,h1表示支架近端环,h2表示支架远
端环,b1表示近端骨段,b2则表示远端骨段。8.根据权利要求6所述的一种基于六轴外固定支架的骨骼正畸电子处方构建方法,其特征在于,所述第四位姿关系的表达式为:r
h1h2
=t
h1h2
u
h1
;所述第二位姿关系的表达式为:所述第三位姿关系的表达式为:所述第一骨骼畸形参数的表达式为:r
b2b1
=t
h1b1
t
h1h2
t
h2b2
u
b2
;其中,m、u表示环上各螺杆连接点在各坐标系下矢量,可利用环结构尺寸求得,r表示移位参数矩阵,a表示成角参数矩阵,t表示位姿关系矩阵。9.根据权利要求1所述的一种基于六轴外固定支架的骨骼正畸电子处方构建方法,其特征在于,用于实现所述骨骼正畸电子处方构建方法的骨骼正畸电子处方构建系统,包括,数据采集模块,用于采集所述断骨的第一骨骼畸形参数、所述近端环(2)的第一移位安装参数、所述远端环(4)的第二移位安装参数,其中,根据x线正侧位片或临床检查测量,获取所述第一骨骼畸形参数;第一数据处理模块,用于获取所述近端骨段(1)与所述远端骨段(5)的第一位姿关系,所述近端骨段(1)与所述近端环(2)的第二位姿关系,所述远端骨段(5)与所述近端环(2)的第三位姿关系;第二数据处理模块,用于基于所述第一位姿关系、所述第二位姿关系、所述第三位姿关系,根据逆运动学算法,获得六根所述螺杆(3)的第一长度;矫治状态构建模块,用于采集断骨矫正后的目标骨骼参数,根据所述第一骨骼畸形参数获取参数变化范围,通过定义畸形矫治速度并对所述参数变化范围进行插值,获得若干个连续的矫治状态以及每个所述矫治状态对应的第二骨骼畸形参数;处方编辑模块,用于基于所述第二骨骼畸形参数,根据所述第一数据处理模块和所述第二数据处理模块,获取每个所述矫治状态对应的每根所述螺杆(3)的第二长度,并根据所述畸形矫治速度、所述第二长度,构建用于对所述断骨进行骨骼畸形治疗的电子处方。10.根据权利要求9所述的一种基于六轴外固定支架的骨骼正畸电子处方构建方法,其特征在于,所述数据采集模块,还用于以所述断骨的骨断端中点为原点,分别建立所述近端骨段(1)的第一坐标系和所述远端骨段(5)的第二坐标系;以所述近端环(2)和所述远端环(4)的几何中心为原点,分别建立所述近端环(2)的第三坐标系和所述远端环(4)的第四坐标系;
基于所述第一坐标系,根据所述第二坐标系获取所述第一位姿关系;根据所述第一坐标系和所述第三坐标系获取所述第二位姿关系;根据所述第二坐标系和所述第四坐标系获取所述第三位姿关系;采集所述第三坐标系的第一螺杆连接点矢量以及所述第四坐标系的第二螺杆连接点矢量;根据所述第一位姿关系、所述第一螺杆连接点矢量,获取近端环(2)的第一螺杆连接点到所述近端骨段(1)的第一坐标系矢量;根据所述第二螺杆连接点矢量、所述第二位姿关系、所述第三位姿关系,获取远端环(4)的第二螺杆连接点到所述远端骨段(5)的第二坐标系矢量;通过对所述第一坐标系矢量和所述第二坐标系矢量分别去绝对值后进行解算,获取所述第一长度。
技术总结
本发明公开一种基于六轴外固定支架的骨骼正畸电子处方构建方法,包括以下步骤:采集断骨的第一骨骼畸形参数、近端环的第一移位安装参数、远端环的第二移位安装参数,获取近端骨段与远端骨段的第一位姿关系,近端骨段与近端环的第二位姿关系,远端骨段与近端环的第三位姿关系,并根据逆运动学算法,获得螺杆的第一长度;采集断骨矫正后的目标骨骼参数,获得若干个连续的矫治状态以及每个矫治状态对应的每根螺杆的第二长度,并根据畸形矫治速度、第二长度,构建用于对断骨进行骨骼畸形治疗的电子处方;本发明削弱了人工测量误差对处方精度和畸形矫正效果的影响,并可有效帮助医生在患者治疗过程中及时修正处方以规避可能存在的治疗风险。的治疗风险。的治疗风险。
技术研发人员:张氢 葛韵斐 冯文宗 孙远韬 李雅华 邱小红 张海天 施俊杰 杨杰 王俊雄 王熙遴
受保护的技术使用者:埃客(上海)医用设备有限公司
技术研发日:2022.01.25
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。