1.本发明涉及液压系统智能控制领域,尤其涉及一种基于负载实时位移的液压系统定位控制方法及系统。
背景技术:
2.现阶段,液压系统中经常需要对注射成型的模具执行往复式的开合模动作,而一个完整的开合模动作一般都包括启动、保持和停止三个阶段,而三个阶段的速度也并不相同,启动阶段的速度逐渐加快,加速到设定速度后保持匀速状态,并在停止阶段时逐渐减速直至动作停止,运动对象在启动和停止阶段分别会出现加速和减速的过渡过程。但是,现有的液压系统中无论是启动阶段还是停止阶段其速度都是无法调控的,容易导致开合模动作在启动阶段加速过快或在停止阶段减速过快的情况,速度变化过快使得开合模动作稳定性差,容易导致模具出现变形的情况。
技术实现要素:
3.为了克服现有技术的不足,本发明的目的之一在于提供一种基于负载实时位移的液压系统定位控制方法,可对开合模实现高精度的定位动作智能控制,提高整个开合模动作的稳定性。
4.本发明的目的之二在于提供一种基于负载实时位移的液压系统定位控制系统。
5.本发明的目的之三在于提供一种电子设备。
6.本发明的目的之四在于提供一种存储介质。
7.本发明的目的之一采用如下技术方案实现:
8.一种基于负载实时位移的液压系统定位控制方法,包括:
9.接收实时监控反馈所得的实时位置参数,根据实时位置参数确定运动对象当前所处阶段;
10.调用预设位置参数以及预设位置所对应的阀体的压力/流量数据,并结合运动对象当前所处阶段对当前位置下的运动对象进行控制算法分析以获得当前位置所对应的阀体的压力/流量数据,并输出对应的调制信号以自动对运动对象的运动状态进行修正调整。
11.进一步地,获取运动对象的实时位置的方法为:
12.利用位移传感器测量运动对象的运动位置以获得运动对象的实时位置。
13.进一步地,获得所述压力/流量数据的方法为:
14.利用装设在用于控制运动对象活动的阀体上的压力传感器或流量传感器来测量压力/流量数据。
15.进一步地,所述预设位置参数包括运动对象在启动阶段/停止阶段的起点和终点位置。
16.进一步地,所述控制算法所对应公式为:
17.y=(y
2-y1)(x-x1)/(x
2-x1) y1;
18.其中,x为运动对象的实时位置,x1为运动对象在启动阶段/停止阶段的起点位置,x2为运动对象在启动阶段/停止阶段的终点位置,且x1≤x≤x2;y为运动对象在当前位置所对应的压力/流量数据,y1为运动对象在启动阶段/停止阶段的起点位置所对应的压力/流量数据,y2为运动对象在启动阶段/停止阶段的终点位置所对应的压力/流量数据,且0≤y≤y2。
19.进一步地,输出所述调制信号后,还包括:
20.判断所述调制信号是否超过设定阈值,若超过,则将所述调制信号经过限幅电路以输出低于或等于设定阈值的信号,再根据限幅后的信号执行对应的修正操作。
21.进一步地,还包括:
22.实时判断所述压力/流量数据是否超过预设范围,若超过则发起故障报警提示并控制运动对象执行自动暂停操作。
23.本发明的目的之二采用如下技术方案实现:
24.一种基于负载实时位移的液压系统定位控制系统,执行如上述的基于负载实时位移的液压系统定位控制方法,包括:
25.信号采集模块,用于扫描各采样元件的反馈信号以获得运动对象的位置参数以及运动对象所处位置所对应的阀体的压力/流量数据;
26.定位监控模块,用于调用预设位置参数以及预设位置所对应的阀体的压力/流量数据,并结合运动对象当前所处阶段对当前位置下的运动对象进行分析以获得当前位置所对应的阀体的压力/流量数据,并输出对应的调制信号;
27.动作增益控制模块,用于按照预设的增益参数控制运动对象运行,并根据所述调制信号对运动对象的运行状态进行修正调整。
28.本发明的目的之三采用如下技术方案实现:
29.一种电子设备,其包括处理器、存储器及存储于所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述基于负载实时位移的液压系统定位控制方法。
30.本发明的目的之四采用如下技术方案实现:
31.一种存储介质,其上存储有计算机程序,所述计算机程序被执行时实现上述的基于负载实时位移的液压系统定位控制方法。
32.相比现有技术,本发明的有益效果在于:
33.利用位移传感器测量所得的实时位置作为系统输入信息,通过对位置的闭环控制来对速度控制,由预先设定好的位置和反馈回的实际测量差值,即根据预先设定的位置和测量位置以及动态的误差,通过构建加减速模式的控制算法,系统将输入信息经智能控制算法分析处理之后,最后由plc输出pwm波,完成驱动比例压力阀、伺服阀动作来完成整个闭环控制,实现对开合模高精度定位动作的智能控制。
附图说明
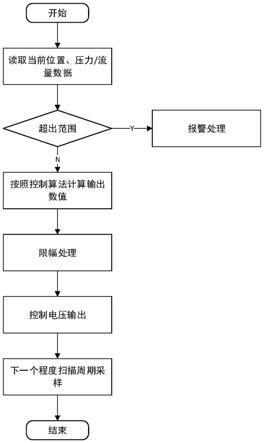
34.图1为本发明基于负载实时位移的液压系统定位控制方法的流程示意图;
35.图2为本发明运动对象执行开合模动作时的速度与位移的关系图。
具体实施方式
36.下面,结合附图以及具体实施方式,对本发明做进一步描述,需要说明的是,在不相冲突的前提下,以下描述的各实施例之间或各技术特征之间可以任意组合形成新的实施例。
37.实施例一
38.本实施例提供一种基于负载实时位移的液压系统定位控制方法,本实施例的控制方法以可编程控制器为核心,联合位移传感器、压力传感器、伺服阀来控制液压系统(液压油缸),对注射成型设备的开合模动作(往复式直线运动)进行控制,实现对开合模高精度定位动作的智能控制。
39.如图1所示,本实施例的液压系统定位控制方法具体包括如下步骤:
40.步骤s1:接收实时监控反馈所得的实时位置参数,根据实时位置参数确定运动对象当前所处阶段;
41.步骤s2:调用预设位置参数以及预设位置所对应的阀体的压力/流量数据,并结合运动对象当前所处阶段对当前位置下的运动对象进行分析以获得当前位置所对应的阀体的压力/流量数据,并输出对应的调制信号以自动对运动对象的运动状态进行修正调整。
42.本实施例的运动对象为液压系统中的动模板,而该动模板可以由对应阀体来控制其移动,其阀体可以是比例压力阀、伺服阀等,从而实现液压系统中合膜机构执行开合模动作。
43.本实施例利用位移传感器来测量运动对象的运动位置从而获得运动对象的实时位置;此外,本实施例还在用于控制运动对象活动的阀体上装设压力传感器或流量传感器,利用压力传感器来测量伺服阀输出的压力数据,利用流量传感器来测量伺服阀输出的流量数据,通过压力数据/流量数据可获知运动对象的运动速度。
44.本实施例的运动控制算法的核心是采用样条插值法把目标点进一步细化,分段控制,运动的初始位置可以根据实际需要进行调整,使运动曲线更加平滑,然后在运动过程中可按需进行调节,最终达到高速高精的设计要求。结合图2对控制算法的运行方法进行说明,具体为:
45.步骤s21:将所述预设位置参数以及预设位置所对应的压力/流量数据分别进行差值运算以获得运动对象的加速/减速速率;其中,所述预设位置参数包括运动对象在启动阶段/停止阶段的起点和终点位置;
46.步骤s22:将速率以及运动对象的实时位置导入公式一中进行控制算法的分析计算以获得运动对象在当前位置所对应的压力/流量数据,从而获知运动对象在当前阶段所对应的速度。
47.其所述控制算法所对应公式为:
48.y=(y
2-y1)(x-x1)/(x
2-x1) y1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
公式一;
49.其中,x为运动对象的实时位置,x1为运动对象在启动阶段/停止阶段的起点位置,x2为运动对象在启动阶段/停止阶段的终点位置,且x1≤x≤x2;y为运动对象在当前位置所对应的压力/流量数据,y1为运动对象在启动阶段/停止阶段的起点位置所对应的压力/流量数据,y2为运动对象在启动阶段/停止阶段的终点位置所对应的压力/流量数据,且0≤y≤y2。
50.假设根据实时位置确定运动对象当前处于启动阶段,x1为运动对象在启动阶段的起点位置,x2为运动对象在启动阶段的终点位置,y1为运动对象在启动阶段的起点位置所对应的压力/流量数据,y2为运动对象在启动阶段的终点位置所对应的压力/流量数据;差值运算后(y
2-y1)/(x
2-x1)的比值代表启动阶段的加速速率,再结合运动对象当前位置即可计算出运动对象处于当前位置时阀体所对应的压力/流量数据,相当于获知运动对象处于当前位置下所对应的速度;将运动对象处于当前位置时计算所得的阀体对应的压力/流量数据以及通过传感器直接读取的压力/流量数据进行比对,即可获知二者的偏差,根据二者偏差执行自动修正机构的动作。
51.本实施例经过公式一计算出运动对象在当前位置时阀体对应的压力/流量数据后,最后可输出对应的pwm波形,完成驱动比例压力阀、伺服阀动作来完成整个闭环控制,实现对开合模高精度定位动作的智能控制。
52.在一些实施例中,在输出所述调制信号后,还包括:
53.判断所述调制信号是否超过设定阈值,若超过,则将所述调制信号经过限幅电路进行限幅处理,最终输出低于或等于设定阈值的信号,再根据限幅后的信号执行对应的修正操作。
54.在一些实施例中,还需对实时检测所得数据进行异常监控,即判断检测所得的阀体的压力/流量数据是否超过预设范围,若超过,则发起故障报警提示并控制运动对象执行自动暂停操作,以实时监控系统的运行状况和检测系统故障。
55.本实施例的定位控制方法对运动对象的启动和停止阶段的过渡过程进行专门而有效的加减速控制,可保证运动对象的运动平稳性,避免冲击和振荡,实现启动时不失步,停止时不超程的目的。
56.实施例二
57.本实施例提供一种基于负载实时位移的液压系统定位控制系统,该控制系统执行如实施例一所述的基于负载实时位移的液压系统定位控制方法,其定位控制系统具体包括如下模块:
58.信号采集模块,用于扫描各采样元件的反馈信号以获得运动对象的位置参数以及运动对象所处位置所对应的阀体的压力/流量数据;其中各采样元件包括用于测量运动对象的运动位置以获得运动对象的实时位置的位移传感器,以及装设在用于控制运动对象活动的阀体上的压力传感器或流量传感器,利用压力传感器或流量传感器来测量压力/流量数据;
59.定位监控模块,用于调用预设位置参数以及预设位置所对应的阀体的压力/流量数据,并结合运动对象当前所处阶段对当前位置下的运动对象进行分析以获得当前位置所对应的阀体的压力/流量数据,并输出对应的调制信号;
60.动作增益控制模块,用于按照预设的增益参数控制运动对象运行,并根据所述调制信号对运动对象的运行状态进行修正调整。
61.实施例三
62.本实施例提供一种电子设备,其包括处理器、存储器及存储于所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现实施例一中的基于负载实时位移的液压系统定位控制方法;另外,本实施例还提供一种存储介质,其上存
储有计算机程序,所述计算机程序被执行时实现上述的基于负载实时位移的液压系统定位控制方法。
63.本实施例中的设备及存储介质与前述实施例中的方法是基于同一发明构思下的两个方面,在前面已经对方法实施过程作了详细的描述,所以本领域技术人员可根据前述描述清楚地了解本实施例中的设备及存储介质的结构及实施过程,为了说明书的简洁,在此就不再赘述。
64.上述实施方式仅为本发明的优选实施方式,不能以此来限定本发明保护的范围,本领域的技术人员在本发明的基础上所做的任何非实质性的变化及替换均属于本发明所要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
