1.本发明涉及无人飞行器察打发控技术领域,具体涉及一种察打一体无人直升机火控系统。
背景技术:
2.随着国内外察打一体无人机武器系统的快速发展,小型无人直升机以其体积小、成本低、具备垂直起降、悬停能力,对起飞降落的场地要求不高,受到越来越多的用户青睐,可以广泛用于航拍侦查、精确打击、战场监视等任务。传统固定翼无人系统携带弹药、侦测载荷的体积大、重量大、成本高,且火控发射流程时序复杂,因此,需设计一种低成本、轻量化、操控简化的适用于察打一体无人直升机武器的火控系统,来满足无人直升机前线侦察打击、战场转移期间伴随防御场合的使用。
技术实现要素:
3.有鉴于此,本发明提供了一种察打一体无人直升机火控系统,具有低成本、轻量化、操控简化等优点,能够准确侦察、精确瞄准、连续打击。
4.本发明的技术方案为:一种察打一体无人直升机火控系统,包括:光电吊舱、导弹分配器、导弹抱箍、双向数据链和地面控制站;
5.两枚筒装导弹通过导弹抱箍固定在无人直升机导弹发射架的横向两侧,光电吊舱安装在无人直升机的腹部,用于跟踪目标、测量目标信息;导弹分配器固定在导弹发射架的下端,用于接收地面控制站发出的光电吊舱、筒装导弹操控指令和筒装导弹发射点火指令,并下发光电吊舱、筒装导弹实时工作状态和传递对准位置、姿态信息;其中,无人直升机和地面控制站之间通过双向数据链进行信息交互,导弹发射架固定在无人直升机的腹部。
6.优选地,所述筒装导弹包括:发射筒和安装在发射筒内的多用途导弹。
7.优选地,所述双向数据链包括:机载数据链天线、机载数据链终端、地面数据链终端和地面数据链天线;无人直升机通过机载数据链天线接收地面控制站发出的光电吊舱、筒装导弹操控指令和筒装导弹发射点火指令,通过机载数据链终端将机载数据链天线接收的指令转发给导弹分配器;其中,机载数据链天线设置在无人直升机的尾部,机载数据链终端设置在导弹发射架上;
8.所述地面数据链终端通过地面数据链天线接收机载数据链终端发送的下行数据,通过解析获取到遥测数据和打击载荷图像;其中,遥测数据包括:光电吊舱红外/可见光/激光工作状态、跟踪速率、视线指向角度信息,筒装导弹的姿态信息、导引头工作状态和跟踪数据、传递对准数据。
9.优选地,所述地面控制站包括:控制方舱和设置在控制方舱底部的越野底盘,地面数据链天线和gps天线外置于控制方舱上,控制方舱内设有火控操作席、飞控操作席、配电机柜;其中,gps天线用于定位地面控制站,火控操作席和飞控操作席分别用于操作人员进行火控和飞控操作,配电机柜用于为地面控制站供电。
10.优选地,所述火控操作席上设有火控计算机、操控手柄、键盘鼠标组件和地面数据链终端,火控计算机通过串口、usb口采集操控手柄和键盘鼠标组件操作动作生成的导弹选择、发动机点火、导引头视线转动、目标跟踪与光电吊舱视线偏转、目标跟踪、距离测量的控制指令,同时,地面数据链终端将遥测数据和打击载荷图像发送给火控计算机,火控计算机完成打击载荷图像和遥测数据解析、显示与记录;地面数据链终端依次通过地面数据链天线和机载数据链天线将火控计算机生成的控制指令传输给机载数据链终端;机载数据链终端接收到控制指令后,分别传输给无人直升机的飞控系统、光电吊舱和导弹分配器,打击载荷接收指令解析、执行控制指令相应的动作,实现无人直升机和打击载荷的控制;其中,打击载荷为光电吊舱、导弹分配器和多用途导弹。
11.优选地,所述火控操作席上还设有监控监视器,监控监视器用于执行火控计算机对打击载荷图像和遥测数据的显示。
12.有益效果:
13.1、本发明的火控系统,通过双向数据链实现地面控制站与无人直升机之间的通信,便于进行光电侦察信息共享及地面控制站发送控制指令;地面控制站的操作人员可控制光电吊舱完成打击目标搜索和确认以及参数测量;导弹发射架的使用,可将筒装导弹通过导弹抱箍安装在无人直升机腹部的左右两侧,且便于拆装;导弹分配器便于实现火力打击导弹选择、向地面控制站报告当前的载弹状态、响应地面控制站发送的命令,并将地面控制站发送的控制指令转发发送给筒装导弹;从而提供了一种具有低成本、轻量化、操控简化等优点,能够准确侦察、精确瞄准、连续打击的火控系统。
14.2、本发明中火控操作席上设置的火控计算机,可结合多用途导弹导弹的发射工作时序、无人直升机反馈给地面控制站的数据完成发射传递对准,实时计算多用途导弹的发射包络,便于对多用途导弹一键发射;其综合光电吊舱、载机(无人直升机)和多用途导弹的信息和导弹弹道特征,能够实现一种低成本、操作简便的火控操作,可完成武器系统航拍侦查、精度打击等任务。
附图说明
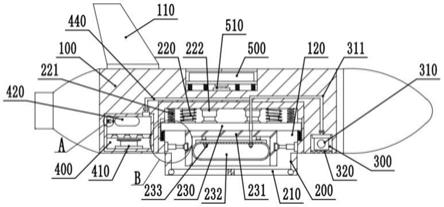
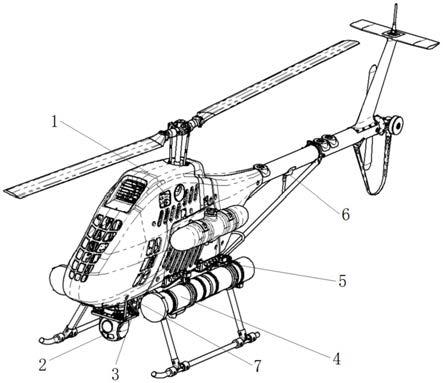
15.图1为本发明察打一体无人直升机火控系统的机载端实施示意图。
16.图2为本发明察打一体无人直升机火控系统地面控制站的外形布局示意图。
17.图3为本发明操作席位的布局示意图。
18.其中,1-无人直升机,2-光电吊舱,3-导弹分配器,4-筒装导弹,5-导弹抱箍,6-机载数据链天线,7-机载数据链终端,8-地面控制站,201-控制方舱,202-地面数据链天线,203-gps天线,301-火控操作席,302-飞控操作席,303-监控监视器,304-火控计算机,305-操控手柄,306-键盘鼠标组件,307-配电机柜,308-地面数据链终端。
具体实施方式
19.下面结合附图并举实施例,对本发明进行详细描述。
20.本实施例提供了一种察打一体无人直升机火控系统,具有低成本、轻量化、操控简化等优点,能够准确侦察、精确瞄准、连续打击。
21.如图1和图2所示,该火控系统包括:光电吊舱2、导弹分配器3、导弹抱箍5、双向数
据链和地面控制站8;
22.两枚筒装导弹4(包括发射筒和发射筒内装载的多用途导弹)通过导弹抱箍5固定在无人直升机1导弹发射架(固定在无人直升机1的腹部)的横向两侧,光电吊舱2安装在无人直升机1的腹部,用于跟踪目标、测量目标信息;导弹分配器3(导弹发控组件)固定在导弹发射架的下端,用于接收地面控制站8发出的光电吊舱2、多用途导弹操控指令和多用途导弹发射点火指令,并下发光电吊舱2、多用途导弹实时工作状态和传递对准位置、姿态信息;其中,无人直升机1和地面控制站8之间通过双向数据链进行信息交互。
23.本实施例中,光电吊舱2是无人直升机火控系统的主要载荷,其上集成有可见光摄像相机、长波非制冷红外热像仪和激光测距机,主要具有无人机对地面目标的搜索、观察、跟踪,定位、测距等功能。
24.本实施例中,双向数据链包括:机载数据链天线6、机载数据链终端7、地面数据链终端308和地面数据链天线202;无人直升机1通过机载数据链天线6(设置在无人直升机1的尾部)接收地面控制站8发出的光电吊舱2、多用途导弹操控指令和多用途导弹发射点火指令,通过机载数据链终端7(设置在导弹发射架上)将机载数据链天线6接收的指令转发给导弹分配器3;
25.地面数据链终端308通过地面数据链天线202可接收机载数据链终端7发送的下行数据,通过解析获取到遥测数据(光电吊舱2红外/可见光/激光工作状态、跟踪速率、视线指向角度信息,筒装导弹4的姿态信息、导引头工作状态和跟踪数据、传递对准数据)和打击载荷图像。
26.本实施例中,地面控制站8采用移动式方案,包括:控制方舱201和设置在控制方舱201底部的越野底盘,地面数据链天线202和gps天线203(用于定位地面控制站8)外置于控制方舱201上,控制方舱201内设有火控操作席301、飞控操作席302和配电机柜307等;
27.如图3所示,火控操作席301上设有监控监视器303、火控计算机304、操控手柄305、键盘鼠标组件306和地面数据链终端308,火控计算机304通过串口、usb口采集操控手柄305和键盘鼠标组件306操作动作生成的导弹选择、发动机点火、导引头视线转动、目标跟踪与光电吊舱2视线偏转、目标跟踪、距离测量等控制指令,同时,地面数据链终端308将遥测数据和打击载荷图像发送到火控操作席301中的火控计算机304,火控计算机304完成打击载荷图像和遥测数据解析、显示与记录;地面数据链终端308依次通过地面数据链天线202和机载数据链天线6将火控计算机304生成的控制指令传输给机载数据链终端7;机载数据链终端7接收到控制指令后,分别传输给无人直升机1的飞控系统(无人直升机1自身携带,且受飞控操作席302控制)、光电吊舱2和导弹分配器3,打击载荷(光电吊舱2、导弹分配器3和多用途导弹)接收指令解析、执行控制指令相应的动作,实现无人直升机1和打击载荷的控制;其中,监控监视器303用于执行火控计算机304对打击载荷图像和遥测数据的显示。
28.本实施例中,火控计算机304所使用的火控软件采用qt creator开发,其为一款跨平台(linux、mac os、windows)的包括项目生成向导、高级c 编辑器的集成开发环境(ide)所开发的软件,该软件可结合多用途导弹发射前的工作流程和原理,开发与多用途导弹、光电吊舱2使用流程匹配的火控软件,具备良好的人机交互界面,操作简便,系统可移植性好;火控操作人员使用火控软件产生指令并显示系统工作状态和载荷图像。
29.本实施例中,飞控操作席302通过飞行控制软件完成无人直升机1平台状态、链路
设备状态等数据解析、显示和记录。
30.该火控系统工作之前,地面控制站8飞控操作人员通过飞控操作席302规划无人直升机1的航迹,无人直升机1按照规划航迹巡飞,并通过双向数据链与地面控制站8进行双向通信,地面控制站8的火控操作人员遥控连接火控计算机304的操控手柄305控制光电吊舱2的视线转动,从而对目标区域进行搜索,当发现疑似目标后使用光电吊舱2锁定并跟踪目标,实时获取目标位置信息和方位信息,光电吊舱2的视线持续跟踪目标;确认跟踪目标后,通过光电吊舱2的激光测距机测量无人直升机1与目标之间的距离,火控操作席301接收光电吊舱2的视线角度信息,并通过双向数据链向导弹分配器3发出打击指令,导弹分配器3控制选定任意一枚筒装导弹4或全部两枚筒装导弹4上电,筒装导弹4上电自检,发射筒前后端保护盖展开,筒装导弹4自检完成后向火控计算机304反馈自检结果,火控计算机304启动惯组传递对准,为确保筒装导弹4发射时刻具备正确的导航解算初始条件,动基座对准采用“速度 位置”匹配法进行子惯导传递对准;
31.火控系统控制筒装导弹4的导引头视线自动对向目标区域,操作人员切换至导引头视场画面,调整跟踪波门锁定目标;地面控制站8中火控操作席301上的火控计算机304计算并显示是否允许多用途导弹攻击,操作人员通过操控手柄305,击发导弹发射按钮,火控计算机304采集发射指令后通过地面数据链终端308自动完成打击目标参数和发动机点火指令等上行指令、数据发送,导弹分配器3接收到机载数据链终端7接收的地面指令和目标参数,向筒装导弹4转发,待筒装导弹4反馈完成参数装订后,导弹分配器3通过其自带的继电器完成固体火箭发动机点火;固体火箭发动机点火后推动多用途导弹离轨飞向目标;地面控制站8的火控计算机304完成导弹发射后,可显示画面并切换至光电吊舱2侦查画面,从而继续对目标观察,评估多用途导弹打击效果;也可切换至另一枚多用途导弹的导引头视场画面,按上述步骤执行导弹发射,实施对目标连续打击。
32.综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。