1.本发明涉及一种用于识别、拦截及回收高空坠物的设备及其使用方法,具体涉及一种基于多传感器数据融合的高空坠物拦截设备及其使用方法。
背景技术:
2.近年来,随着高层居民楼渐渐成为城市居住方式的主流,高空坠物引发的人身伤害和财产伤害的风险也逐渐增加,威胁人民群众生命财产安全,引发社会公众高度关注。小到果核、塑料瓶,大到花盆、广告牌等等,许多物件一旦从高空落下,就有可能变成伤人利器。因此,提供一种能够拦截高空坠物的有效设备及其使用方法,对于人民的生命财产安全具有重要意义,目前,现有技术中有一些试图解决高空坠物拦截问题的技术方案,但这些技术方案存在自动化程度低、人工干预依赖性较大,装置复杂繁琐等缺点。
技术实现要素:
3.本发明针对现有技术中存在的不足与缺陷,提供了一种基于多传感器数据融合的高空坠物拦截设备,通过在建筑上布置多种传感器,识别高空坠物,并根据识别结果控制坠物拦截与回收装置对坠物进行精准拦截与自主回收。本发明还提供了一种基于多传感器数据融合的高空坠物拦截设备的使用方法,通过多种传感器数据融合处理发现、判断、识别高空坠物,并根据识别结果控制拦截即回收装置对坠物进行精准拦截与自主回收,其中坠物拦截与回收装置不仅是开合两种状态,其速度、开合角度、拦截位置均可以精细控制,做到精准拦截,且具备自主回收功能,可以在无人工干预或少量干预的前提下完全回收到初始状态。
4.本发明通过以下具体技术方案实现:
5.一种基于多传感器数据融合的高空坠物拦截设备,包括设置在建筑物上用于识别高空坠物的多种传感器、对传感器数据进行分析判断的坠物判断与识别系统、根据识别结果对高空坠物进行拦截并对坠物进行回收的坠物拦截及收回装置,所述的传感器、坠物判断与识别系统、坠物拦截及回收装置之间具有有线或无线的通信链路。
6.进一步地,所述的多种传感器包括活物检测传感器、位置判断传感器、图像采集器;所述坠物拦截与回收装置放置于建筑物的下方,悬空固定在建筑物的外立面上,图像采集器设置在坠物拦截及回收装置上方,方向朝上,用于采集图像数据;活物检测传感器放置于每层楼可抛物位置,用于检测活物;位置判断传感器放置于每层楼可抛物位置的下方、建筑物的外立面上并朝建筑外,用于判断物体坠落位置。
7.进一步地,所述的位置判断传感器为红外传感器、图像采集器为摄像头。
8.进一步地,所述的坠物拦截及回收装置包括:拦截臂、挂网孔、收网传动臂固定座、外收网孔、内收网孔、拦截臂转动轴、转动轴驱动电机、拦截网、收网线、收网传动臂、传动臂穿网孔、收网滑动座、收网滑轨,其中:
9.所述的拦截臂转动轴为两个,固定在建筑物外立面的墙体上,收网滑轨安装在两个拦截臂转动轴之间;
10.所述的拦截臂为两个,每个拦截臂的其中一端固定在其中一个拦截臂转动轴上、拦截臂转动轴与收网滑轨的连接处,每个拦截臂上设置有挂网孔、外收网孔、内收网孔,在拦截臂转动轴上安装有转动轴驱动电机;
11.所述的收网传动臂为两个,每个收网传动臂的其中一端通过收网传动臂固定座固定安装在其中一个拦截臂内侧,另一端通过收网滑动座安装在收网滑轨上,收网滑动座在收网滑轨上可以滑动;所述的收网传动臂上设置有传动臂穿网孔;
12.所述的拦截网通过挂网孔挂在两个拦截臂之间;
13.所述的收网线穿插于拦截网中,外收网孔、内收网孔、传动臂穿网孔用于连接收网线。
14.进一步地,所述的两个拦截臂之间的长度l为l=2b d,其中b表示每个拦截臂的长度,d表示两个拦截臂闭合状态、即贴合在收网滑轨上上时两个臂端之间的距离;所述的收网传动臂长度为c,其长度为拦截臂长度b的一半;
15.所述的外收网孔、内收网孔、传动臂穿网孔均有多个,其数量相同。即:每一个传动臂上的外收网孔与内收网孔数量相等,与每一个收网传动臂上的传动臂穿网孔的数量亦相等,均表示为n。
16.在每个拦截臂上均设置有第1个至第n个外收网孔,表示为w1-wn,在每个拦截臂外侧、长度b上等距排列;在每个拦截臂上均设置有第1个至第n个内收网孔,表示为z1-zn,在每个拦截臂内侧、0至b/2的长度范围等距排列,w1在每个拦截臂上远离拦截臂转动轴一端、z1在每个拦截臂上靠近拦截臂转动轴一端;在每个收网传动臂上均设置有第1个至第n个传动臂穿网孔,表示为l1-ln,在每个收网传动臂上等距排列,每个收网传动臂上l1在靠近收网滑轨一端、ln在远离收网滑轨一端;
17.所述的收网线有多根,第n根的其中一端固定在一侧的收网传动臂的ln处,穿过同侧的拦截臂的zn孔,再穿过wn孔;线的另一端对称连接到另外一侧的收网传动臂的ln处,穿过拦截臂的zn孔,再穿过wn孔;
18.第n根收网线的长度为2b d b/2 (n-n)b/2n=2.5b d (n-n)b/2n。
19.一种基于多传感器数据融合的高空坠物拦截设备的使用方法,包括以下步骤:
20.步骤1:通过部署在建筑物上的多种传感器持续采集数据;
21.步骤2:步骤1中采集的传感器数据通过有线或无线的方式传输给坠物判断与识别系统,由坠物判断与识别系统进行判断与识别,得到判断与识别结果,包括以下步骤:
22.2.1利用活物检测传感器判断是否有坠物可能,当判断结果为有坠物可能时,则发出指令提升图像采集器采样率,并启动图像识别功能,进入步骤2.2;
23.2.2利用图像识别结果判断是否有坠物落下,当判断结果为有坠物落下时,进入步骤2.3;
24.2.3当有坠物落下时,计算并判断坠物的落点以及拦截臂的展开角度,当判断结果为坠物落点在拦截范围内时,发出拦截指令,拦截指令包括拦截及拦截角度数据,进入步骤3;
25.步骤3:根据步骤2的坠物识别与判断结果,当收到拦截指令时,控制拦截臂打开,
并通过指令中的拦截臂展开角度数据确定拦截臂张开的角度,使得所述装置打开到特定位置、角度,从而覆盖坠物落点位置。
26.进一步地,所述步骤2中的2.1包括以下步骤:
27.步骤2.1.1:设置压力阈值为y,若活物传感器检测到可抛物位置有活物或者感受到可抛物位置有超过压力阈值y的额外压力,则开始收集图像采集器数据并对坠物进行判断和识别;
28.步骤2.1.2:通过收集的传感器数据对坠物进行判断:提取可抛物位置部署的传感器的带时间戳数据集;对所述的数据集进行处理:
29.1)每个数据集有n个时间窗口,通过吉布斯采样方式,在n个数据窗口中随机选择k个窗口数据;
30.2)将k个窗口数据的平均值设置为当前的动态阈值tk,将所有历史数据的均值设置为t
all
,若tk≤t
all
,则判断没有检测到有物体靠近、判断结果为“没有抛物可能”;
31.3)若tk》t
all
,则展开进一步判断:
32.3.1)若tk》2t
all
,则判断当前窗口采集到了大量超过阈值的数据,判定为有物体遮挡了活物传感器或站立在了传感器处,判断结果为“有抛物可能”;
33.3.2)若tk≤2t
all
,则认为当前窗口存在超过阈值的数据,检查超过阈值数值出现的时间序列,假设有m个超过阈值的数值,计算时间差之和:
[0034][0035]
若则认为有活物存在,判断结果为“有抛物可能”;
[0036]
若则检查其中时间序号连续的超过阈值tk数据的数量td’,若超过50%m,则判断结果为“有抛物可能”;
[0037]
若不超过50%m,判断为误判,按照随机概率来判断是否存在抛物可能;
[0038]
步骤2.1.3:若2.1.2中判断结果为“有抛物可能”,则打开图像采集器高采样率开关,提升采样率,并启动图像识别功能;否则,根据的概率决定是否提升图像采集器采样率及启动图像识别功能。
[0039]
进一步地,所述步骤2中的2.2包括以下步骤:
[0040]
步骤2.2.1:根据采集的图像识别结果,针对连续两帧图像,分别将图中每个像素点进行二值化处理,每个像素点位置为0或1,并由上至下,由左至右,将所有二值化后的值存储为字符串s1和s2,字符串长度为像素点数量p;
[0041]
步骤2.2.2:对两个字符串s1和s2进行如下操作:
[0042]
对第i个字节,计算:r[i]=s1[i]|s2[i]-s1[i]&s[i],
[0043]
对所有字节进行上述处理后,得到新的字符串r;
[0044]
步骤2.2.3:计算字符串r中比特位为1的数量,记为d;
[0045]
步骤2.2.4:计算d/p值并存入数组q,将字符串r存入数组u中;
[0046]
步骤2.2.5:在收集到k个d/p值和r字符串后,展开如下判断:
[0047]
若k个d/p值的标准差大于或等于则判断结果为“没有坠物落下”;
[0048]
若k个d/p值的则对每两个连续r计算r’=r1[i]|r2[i]-r1[i]&r[i],得到k-1个r’字符串,其中为所有k个d的平均值,trp为预先设置的稳定阈值,将k-1个r’进行异或操作,并计算比特位为1的数量,记为d:
[0049]
1)若或者其中为所有k个d的平均值,trd为预先设置的判定阈值,则判断结果为“有坠物落下”;
[0050]
2)若不满足上述条件,则判断结果为“没有坠物落下”。
[0051]
进一步地,所述步骤2中的2.3包括以下步骤:
[0052]
步骤2.3.1:针对步骤2.2.2中获得的k个r字符串,将每个字符串r转化为c
×
g的01比特矩阵m,其中m[i][j]=r[i*j],且c
×
g=p;
[0053]
步骤2.3.2:将矩阵中所有取值为1的横纵坐标进行平均,得到新的横纵坐标o_i和o_j;
[0054]
步骤2.3.3:对于k个r字符串,计算出k个(o_i,o_j)值,并将相邻的o_i坐标和o_j坐标相减,分别得到k-1个d(o_i)值和d(o_j)值;
[0055]
步骤2.3.4:落点坐标为步骤2.3.4:落点坐标为其中分别表示(o_i)、(o_j)的平均值,tau表示从图形采集器第一次捕捉到坠物直到坠物落到拦截网上的时间;判断落点坐标是否在拦截网完全展开的范围内:分别以两个拦截臂转动轴为坐标原点,向收网滑轨方向为x轴,向垂直于收网滑轨方向为y轴,判断落点坐标(x,y)是否满足x2 y2《b2:若成立,则拦截角度为arctan[y/x];若落点在左拦截臂左侧,则左拦截臂拦截角度为90 arctan[y/x],右拦截臂拦截角度为arctan[y/x];若落点在右拦截臂右侧,则右拦截臂拦截角度为90 arctan[y/x],左拦截臂拦截角度为arctan[y/x];
[0056]
步骤2.3.5:将拦截指令,包括拦截、左/右、拦截角度,发送至两个机械臂。
[0057]
进一步地,所述的步骤3后还包括步骤4,步骤4包括以下步骤:
[0058]
拦截网上安装有压力传感器,当拦截臂展开后,检测拦截网所安装的压力传感器数值是否大于预先设定的阈值try:
[0059]
1)若成立,则判断为拦截到坠物,向服务器发送拦截成功通知;
[0060]
2)若不成立,发送机械臂闭合指令。
[0061]
本发明具有以下显著的、有益的技术效果:
[0062]
1、本发明提供的基于多传感器数据融合的高空坠物拦截设备,通过在建筑上布置多种传感器,识别高空坠物,并根据识别结果控制坠物拦截与回收装置对坠物进行精准拦截与自主回收,可以完全实现自动化、无人工干预。整套装置简单、快捷,易于安装,平时处于闭合状态,不破坏建筑物的外观和美观。
[0063]
2、本发明提供了的一种基于多传感器数据融合的高空坠物拦截设备的使用方法,
通过多种传感器数据融合处理发现、判断、识别高空坠物发,并根据识别结果控制拦截装置对坠物进行精准拦截与自主回收,其中坠物拦截与回收装置不仅是开合两种状态,其速度、开合角度、拦截位置均可以精细控制,做到精准拦截,且具备自主回收功能,可以在无人工干预或少量干预的前提下完全回收到初始状态。
附图说明
[0064]
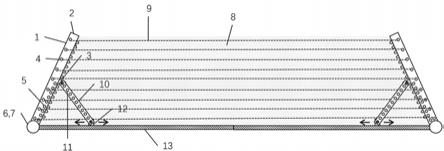
图1:坠物拦截与回收装置结构示意图;
[0065]
图2:收网线连接安装示意图;
[0066]
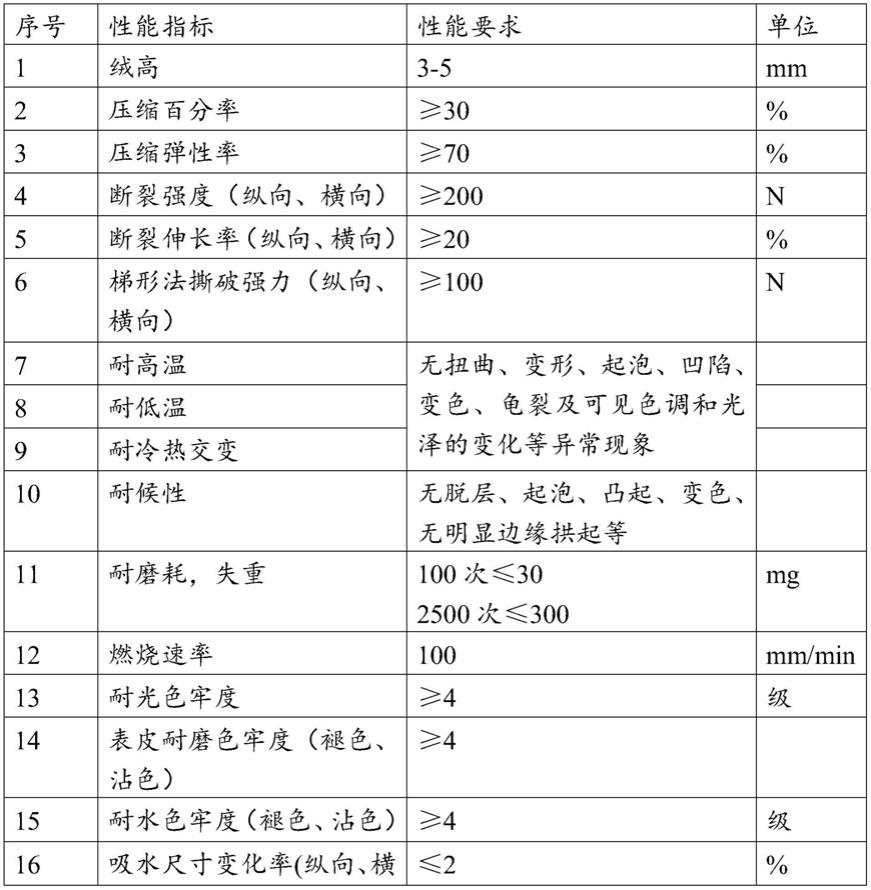
其中:1-拦截臂、2-挂网孔、3-收网传动臂固定座、4-多个外收网孔、5-多个内收网孔、6-拦截臂转动轴、7-转动轴驱动电机、8-拦截网、9-收网线、10-收网传动臂、11-传动臂穿网孔、12-收网滑动座、13-收网滑轨,14-第1根收网线,15-第2根收网线。
具体实施方式
[0067]
在本部分将结合具体实施例对本发明所提供的设备、装置和方法进行进一步详细、具体解释与说明。需要指出的,本部分所提供的实施例不构成对本发明保护范围的限制;在本实施例的基础上所做出的非实质性改变,均与本实施例相同。
[0068]
实施例1
[0069]
在本实施例中,一种基于多传感器数据融合的高空坠物拦截设备,包括设置在建筑物上用于识别高空坠物的多种传感器、对传感器数据进行分析判断的坠物判断与识别系统、根据识别结果对高空坠物进行拦截并对坠物进行回收的坠物拦截及收回装置,所述的传感器、坠物判断与识别系统、坠物拦截及回收装置之间具有有线或无线的通信链路。所述的坠物判断与识别系统通过计算装置实现,如个人计算机、树莓派等设备或者其他现有技术中的计算装置均可实现。
[0070]
所述的多种传感器包括活物检测传感器、位置判断传感器、图像采集器;所述坠物拦截与回收装置放置于建筑物的下方,悬空固定在建筑物的外立面上,图像采集器设置在坠物拦截及回收装置上方,方向朝上,用于采集图像数据;活物检测传感器放置于每层楼可抛物位置,用于检测活物;位置判断传感器放置于每层楼可抛物位置的下方、建筑物的外立面上并朝建筑外,用于判断物体坠落位置。
[0071]
所述的可抛物位置为可用于向楼体外抛物的位置,如窗口、阳台等。
[0072]
所述的活物检测传感器可以是红外传感器,也可以是压力传感器,每个可抛物位置(如窗口、阳台等)部署红外传感器或压力传感器:如部署红外传感器,则部署于墙面,朝向为可抛物位置;如部署压力传感器,则部署于可抛物位置的地面,用以检测压力变化;
[0073]
所述的位置判断传感器为红外传感器、图像采集器为摄像头。除此处提到的传感器外,现有技术中其他能够实现活物检测、位置判断以及图像采集功能的器件亦在本发明的保护范围之内。
[0074]
实施例2
[0075]
与实施例1相比,本实施例的不同之处在于:在实施例1的基础上,所述的坠物拦截及回收装置如附图1所示,包括:拦截臂1、挂网孔2、收网传动臂固定座3、外收网孔4、内收网孔5、拦截臂转动轴6、转动轴驱动电机7、拦截网8、收网线9、收网传动臂10、传动臂穿网孔
11、收网滑动座12、收网滑轨13,其中:
[0076]
所述的拦截臂转动轴6为两个,固定在建筑物外立面的墙体上,收网滑轨13安装在两个拦截臂转动轴6之间;
[0077]
所述的拦截臂1为两个,每个拦截臂1的其中一端固定在其中一个拦截臂转动轴6上、在拦截臂转动轴6与收网滑轨13的连接处,拦截臂可以在拦截臂转动轴上转动;每个拦截臂上均设置有挂网孔2、外收网孔1、内收网孔5,在拦截臂转动轴6上安装有转动轴驱动电机7;
[0078]
所述的收网传动臂10为两个,每个收网传动臂的其中一端通过收网传动臂固定座3固定安装在其中一个拦截臂1内侧,另一端通过收网滑动座12安装在收网滑轨13上,收网滑动座12在收网滑轨13上可以滑动;所述的收网传动臂10上设置有传动臂穿网孔11;
[0079]
所述的拦截网8通过挂网孔2挂在两个拦截臂1之间;
[0080]
所述的收网线9穿插于拦截网8中,外收网孔1、内收网孔5、传动臂穿网孔11用于连接收网线9。所述的穿插是指如缝衣服穿线,收网线9如缝衣线一样穿插于拦截网8之中,收网线9收紧时可以把拦截网回收、收紧,在收网线9放松时,亦不影响拦截网8顺利展开,不仅能够实现快速、简单的自动回收,还能够不影响收网、放网时对建筑物外观的美观。
[0081]
本实施例的坠物拦截及回收装置的工作过程如下:
[0082]
拦截网通过挂网孔挂在两个拦截臂之间,每个拦截臂的一端连接在拦截臂转动轴上,由驱动电机驱动展开或闭合两种状态,当拦截臂闭合时,贴合在收网滑轨上。平时,拦截臂处于闭合状态,当收到拦截指令时,驱动电机控制两个拦截臂张开,将连接在拦截臂上的拦截网展开,进行坠物拦截。
[0083]
收网线穿插于拦截网中,通过外收网孔、内收网孔连接至传动臂穿网孔,收网线贯穿于拦截网,所有的收网线在拦截臂完全展开时均为紧绷状态,当拦截臂处于完全张开的状态时,收网传动臂与拦截臂贴合;当拦截臂处于完全闭合时,收网滑动座滑动至收网滑轨中部的位置,将收网线绷直,收网线处于紧绷状态防止拦截网下垂,并随着拦截臂收回到收网滑轨处。
[0084]
当两个拦截臂均展开时,拦截网被张开,用于拦截坠落物体。
[0085]
实施例3
[0086]
与实施例2相比,本实施例的不同之处在于:在实施例2的基础上,如附图2所示,所述的两个拦截臂1之间的长度l为l=2b d,其中b表示每个拦截臂1的长度,d表示两个拦截臂1闭合状态时两个臂端之间的距离;所述的收网传动臂10长度为c,其长度为拦截臂长度b的一半;
[0087]
所述的外收网孔、内收网孔、传动臂穿网孔均有多个,其数量相同。即:每一个传动臂上的外收网孔与内收网孔数量相等,与每一个收网传动臂上的传动臂穿网孔的数量亦相等,均表示为n。
[0088]
在每个拦截臂1上均设置有第1个至第n个外收网孔4,表示为w1-wn,在每个拦截臂1外侧、长度b上等距排列;在每个拦截臂1上均设置有第1个至第n个内收网孔5,表示为z1-zn,在每个拦截臂1内侧、0至b/2的长度范围等距排列,w1在每个拦截臂1上远离拦截臂转动轴6一端、z1在每个拦截臂1上靠近拦截臂转动轴6一端;在每个收网传动臂10上均设置有第1个至第n个传动臂穿网孔11,表示为l1-ln,在每个收网传动臂10上等距排列,每个收网传
动臂10上l1在靠近收网滑轨13一端、ln在远离收网滑轨13一端;
[0089]
所述的收网线9有多根,第n根的其中一端固定在ln处,穿过zn孔,再穿过wn孔;线的另一端对称连接到另外一个拦截臂上;如附图2所示,第1根收网线14的其中一端固定在一侧的收网传动臂10的l1处,穿过同侧的拦截臂1上的z1孔,再穿过w1孔;第1根收网线14的另一端对称连接到另外一侧的收网传动臂10的l1处,穿过拦截臂1的z1孔,再穿过w1孔。第2根收网线15的其中一端固定在一侧的收网传动臂10的l2处,穿过同侧的拦截臂1上的z2孔,再穿过w2孔;第2根收网线15的另一端对称连接到另外一侧的收网传动臂10的l2处,穿过拦截臂1的z2孔,再穿过w2孔。
[0090]
第n根收网线的长度为2b d b/2 (n-n)b/2n=2.5b d (n-n)b/2n。
[0091]
通过本实施例中对于收网线的安装方式、长度精准设置,使得在坠物拦截及回收装置闭合、收网线9收紧时可以把拦截网规整、精准地回收、收紧,使得没有多余的拦截网垂吊在外面,在在坠物拦截及回收装置打开准备接收坠物时、收网线9放松,帮助拦截网8顺利展开。不仅能够实现快速、简单的自动回收,还能够不影响收网、放网时建筑物外观的美观。
[0092]
实施例4
[0093]
一种基于多传感器数据融合的高空坠物拦截设备的使用方法,包括以下步骤:
[0094]
步骤1:在建筑物上部署多种传感器,通过部署在建筑物上的多种传感器持续采集数据;
[0095]
步骤2:步骤1中采集的传感器数据通过有线或无线的方式传输给坠物判断与识别系统,由坠物判断与识别系统进行判断与识别,得到判断与识别结果,包括以下步骤:
[0096]
2.1利用活物检测传感器判断是否有坠物可能,当判断结果为有坠物可能时,则发出指令提升图像采集器采样率,并启动图像识别功能,进入步骤2.2;
[0097]
2.2利用图像识别结果判断是否有坠物落下,当判断结果为有坠物落下时,进入步骤2.3;
[0098]
2.3当有坠物落下时,计算并判断坠物的落点以及拦截臂的展开角度,当判断结果为坠物落点在拦截范围内时,发出拦截指令,拦截指令包括拦截及拦截角度数据,进入步骤3;
[0099]
步骤3:根据步骤2的坠物识别与判断结果,当收到拦截指令时,控制拦截臂打开,并通过指令中的拦截臂展开角度数据确定拦截臂张开的角度,使得所述装置打开到特定位置、角度,从而覆盖坠物落点位置。
[0100]
实施例5
[0101]
与实施例4相比,本实施例的不同之处在于:在实施例4的基础上,所述步骤2中的2.1包括以下步骤:
[0102]
步骤2.1.1:设置压力阈值为y,若活物传感器检测到可抛物位置有活物或者传感器感受到可抛物位置有超过压力阈值y的额外压力,则开始收集摄像头数据并对坠物进行判断和识别;
[0103]
步骤2.1.2:通过收集的传感器数据对坠物进行判断:提取可抛物位置部署的传感器的带时间戳数据集;为了缩短判断所需时间,对于传感器的每个数据集,并不处理所有的数据,而是采用如下方式对所述的数据集进行处理:
[0104]
1)每个数据集有n个时间窗口,通过吉布斯采样方式,在n个数据窗口中随机选择k
个窗口数据;
[0105]
2)将k个窗口数据的平均值设置为当前的动态阈值tk,将所有历史数据的均值设置为t
all
,若tk≤t
all
,则判断没有检测到有物体靠近、判断结果为“没有抛物可能”;
[0106]
3)若tk》t
all
,则展开进一步判断:
[0107]
3.1)若tk》2t
all
,则判断当前窗口采集到了大量超过阈值的数据,判定为有物体遮挡了活物传感器或站立在了传感器处,判断结果为“有抛物可能”;
[0108]
3.2)若tk≤2t
all
,则认为当前窗口存在超过阈值的数据,检查超过阈值数值出现的时间序列,假设有m个超过阈值的数值,计算时间差之和:
[0109][0110]
若则认为有活物存在,判断结果为“有抛物可能”;
[0111]
若则检查其中时间序号连续的超过阈值tk数据的数量td’,若超过50%m,则判断结果为“有抛物可能”;
[0112]
若不超过50%m,判断为误判,按照随机概率来判断是否存在抛物可能;
[0113]
步骤2.1.3:若2.1.2中判断结果为“有抛物可能”,则打开摄像头高采样率开关,提升摄像头采样率,并启动图像识别功能;否则,根据的概率决定是否提升摄像头采样率及启动图像识别功能。
[0114]
实施例6
[0115]
与实施例5相比,本实施例的不同之处在于:在实施例5的基础上,所述步骤2中的2.2包括以下步骤:
[0116]
步骤2.2.1:根据采集的图像识别结果,针对连续两帧图像,分别将图中每个像素点进行二值化处理,每个像素点位置为0或1,并由上至下,由左至右,将所有二值化后的值存储为字符串s1和s2,字符串长度为像素点数量p;
[0117]
步骤2.2.2:对两个字符串s1和s2进行如下操作:
[0118]
对第i个字节,计算:r[i]=s1[i]|s2[i]-s1[i]&s[i](其中|表示异或操作,&表示与操作,-表示减法操作)
[0119]
对所有字节进行上述处理后,得到新的字符串r;
[0120]
步骤2.2.3:计算字符串r中比特位为1的数量,记为d;
[0121]
步骤2.2.4:计算d/p值并存入数组q,将字符串r存入数组u中;
[0122]
步骤2.2.5:在收集到k个d/p值和r字符串后,展开如下判断:
[0123]
若k个d/p值的标准差大于或等于则判断结果为“没有坠物落下”;
[0124]
若k个d/p值的则对每两个连续r计算r’=r1[i]|r2
[i]-r1[i]&r[i],得到k-1个r’字符串,其中为所有k个d的平均值,trp为预先设置的稳定阈值。将k-1个r’进行异或操作,并计算比特位为1的数量,记为d:
[0125]
1)若或者其中为所有k个d的平均值,trd为预先设置的判定阈值,则判断结果为“有坠物落下”;
[0126]
2)若不满足上述条件,则判断结果为“没有坠物落下”。
[0127]
实施例7
[0128]
与实施例6相比,本实施例的不同之处在于:在实施例6的基础上,所述步骤2中的2.3包括以下步骤:
[0129]
步骤2.3.1:针对步骤2.2.2中获得的k个r字符串,将每个字符串r转化为c
×
g的01比特矩阵m,其中m[i][j]=r[i*j],且c
×
g=p;步骤2.3.2:将矩阵中所有取值为1的横纵坐标进行平均,得到新的横纵坐标o_i和o_j;
[0130]
步骤2.3.3:对于k个r字符串,计算出k个(o_i,o_j)值,并将相邻的o_i坐标和o_j坐标相减,分别得到k-1个d(o_i)值和d(o_j)值;
[0131]
步骤2.3.4:落点坐标为步骤2.3.4:落点坐标为其中分别表示(o_i)、(o_j)的平均值,tau表示从图形采集器第一次捕捉到坠物直到坠物落到拦截网上的时间;判断落点坐标是否在拦截网完全展开的范围内:分别以两个拦截臂转动轴为坐标原点,向收网滑轨方向为x轴,向垂直于收网滑轨方向为y轴,判断落点坐标(x,y)是否满足x2 y2《b2:若成立,则拦截角度为arctan[y/x];若落点在左拦截臂左侧,则左拦截臂拦截角度为90 arctan[y/x],右拦截臂拦截角度为arctan[y/x];若落点在右拦截臂右侧,则右拦截臂拦截角度为90 arctan[y/x],左拦截臂拦截角度为arctan[y/x];
[0132]
步骤2.3.5:将拦截指令,包括拦截、左/右、拦截角度,发送至两个机械臂。
[0133]
实施例8
[0134]
与实施例5-7相比,本实施例的不同之处在于:在实施例5-7的基础上,还包括步骤4:
[0135]
拦截网上还安装有压力传感器,当拦截臂展开后,检测拦截网所连的压力传感器数值是否满足压力传感器y》阈值try:
[0136]
1)若成立,则认为拦截到物品,向系统发送拦截成功通知;
[0137]
2)若不成立,发送机械臂闭合指令。在发送机械臂闭合指令时,可以附加一个闭合的倒计时设置。
[0138]
采用本发明所提供的一种基于多传感器数据融合的高空坠物拦截设备及其使用方法,能实现以下有益的技术效果:
[0139]
1、本发明提供的基于多传感器数据融合的高空坠物拦截设备,通过在建筑上布置多种传感器,识别高空坠物,并根据识别结果控制坠物拦截与回收装置对坠物进行精准拦截与自主回收,可以完全实现自动化、无人工干预。整套装置简单、快捷,易于安装,且平时处于闭合状态,不破坏建筑物的外观和美观。
[0140]
2、本发明提供的基于多传感器数据融合的高空坠物拦截设备,通过创造性地设计
了坠物拦截及回收装置,巧妙地通过装置设计安装收网线,使得拦截之后收网时能够将拦截网干净利落地收回,不会出现多余网线垂挂在装置上、影响建筑物美观的现象。
[0141]
3、本发明提供了的一种基于多传感器数据融合的高空坠物拦截设备的使用方法,通过多种传感器数据融合处理发现、判断、识别高空坠物发,并根据识别结果控制拦截装置对坠物进行精准拦截与自主回收,其中坠物拦截与回收装置不仅是开合两种状态,其速度、开合角度、拦截位置均可以精细控制,做到精准拦截,且具备自主回收功能,可以在无人工干预或少量干预的前提下完全回收到初始状态。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。