1.本发明涉及一种用于识别、拦截及回收高空坠物的设备,具体涉及一种基于多传感器数据融合的高空坠物拦截设备。
背景技术:
2.近年来,随着高层居民楼渐渐成为城市居住方式的主流,高空坠物引发的人身伤害和财产伤害的风险也逐渐增加,威胁人民群众生命财产安全,引发社会公众高度关注。小到果核、塑料瓶,大到花盆、广告牌等等,许多物件一旦从高空落下,就有可能变成伤人利器。因此,提供一种能够拦截高空坠物的有效设备,对于人民的生命财产安全具有重要意义,目前,现有技术中有一些试图解决高空坠物拦截问题的技术方案,但这些技术方案存在自动化程度低、人工干预依赖性较大,装置复杂繁琐等缺点。
技术实现要素:
3.本发明针对现有技术中存在的不足与缺陷,提供了一种基于多传感器数据融合的高空坠物拦截设备,通过在建筑上布置多种传感器,识别高空坠物,并根据识别结果控制坠物拦截与回收装置对坠物进行精准拦截与自主回收。本发明提供的装置可以通过多种传感器数据融合处理发现、判断、识别高空坠物发,并根据识别结果控制拦截装置对坠物进行精准拦截与自主回收,其中坠物拦截与回收装置不仅是开合两种状态,其速度、开合角度、拦截位置均可以精细控制,做到精准拦截,且具备自主回收功能,可以在无人工干预或少量干预的前提下完全回收到初始状态。
4.本发明通过以下具体技术方案实现:
5.一种基于多传感器数据融合的高空坠物拦截设备,包括设置在建筑物上用于识别高空坠物的多种传感器、对传感器数据进行分析判断的坠物判断与识别系统、根据识别结果对高空坠物进行拦截并对坠物进行回收的坠物拦截及收回装置,所述的传感器、坠物判断与识别系统、坠物拦截及回收装置之间具有有线或无线的通信链路。
6.进一步地,所述的多种传感器包括活物检测传感器、位置判断传感器、图像采集器;所述坠物拦截与回收装置放置于建筑物的下方,悬空固定在建筑物的外立面上,图像采集器设置在坠物拦截及回收装置上方,方向朝上,用于采集图像数据;活物检测传感器放置于每层楼可抛物位置,用于采集压力数据;位置判断传感器放置于每层楼可抛物位置的下方、建筑物的外立面上并朝建筑外,用于判断物体坠落位置。
7.进一步地,所述的位置判断传感器为红外传感器、图像采集器为摄像头。
8.进一步地,所述的坠物拦截及回收装置包括:拦截臂、挂网孔、收网传动臂固定座、外收网孔、内收网孔、拦截臂转动轴、转动轴驱动电机、拦截网、收网线、收网传动臂、传动臂穿网孔、收网滑动座、收网滑轨,其中:
9.所述的拦截臂转动轴为两个,固定在建筑物外立面的墙体上,收网滑轨安装在两个拦截臂转动轴之间;
10.所述的拦截臂为两个,每个拦截臂的其中一端固定在其中一个拦截臂转动轴上、拦截臂转动轴与收网滑轨的连接处,每个拦截臂上设置有挂网孔、外收网孔、内收网孔,在拦截臂转动轴上安装有转动轴驱动电机;
11.所述的收网传动臂为两个,每个收网传动臂的其中一端通过收网传动臂固定座固定安装在其中一个拦截臂内侧,另一端通过收网滑动座安装在收网滑轨上,收网滑动座在收网滑轨上可以滑动;所述的收网传动臂上设置有传动臂穿网孔;
12.所述的拦截网通过挂网孔挂在两个拦截臂之间;
13.所述的收网线穿插于拦截网中,外收网孔、内收网孔、传动臂穿网孔用于连接收网线。
14.进一步地,所述的两个拦截臂之间的长度l为l=2b d,其中b表示每个拦截臂的长度,d表示两个拦截臂闭合状态、即贴合在收网滑轨上上时两个臂端之间的距离;所述的收网传动臂长度为c,其长度为拦截臂长度b的一半;
15.所述的外收网孔(1)、内收网孔(5)、传动臂穿网孔(11)均有多个,其数量相同,每一侧的外收网孔(1)、内收网孔(5)、传动臂穿网孔(11)的数量均表示为n;
16.在每个拦截臂上均设置有第1个至第n个外收网孔,表示为w1-wn,在每个拦截臂外侧、长度b上等距排列;在每个拦截臂上均设置有第1个至第n个内收网孔,表示为z1-zn,在每个拦截臂内侧、0至b/2的长度范围等距排列,w1在每个拦截臂上远离拦截臂转动轴一端、z1在每个拦截臂上靠近拦截臂转动轴一端;在每个收网传动臂上均设置有第1个至第n个传动臂穿网孔,表示为l1-ln,在每个收网传动臂上等距排列,每个收网传动臂上l1在靠近收网滑轨一端、ln在远离收网滑轨一端;
17.所述的收网线有多根,第n根的其中一端固定在ln处,穿过zn孔,再穿过wn孔;线的另一端对称连接到另外一个拦截臂上,即在另一侧的另一个拦截臂上固定在该条拦截臂对应的ln处,穿过对应的zn孔,再穿过对应的wn孔。
18.第n根收网线的长度为2b d b/2 (n-n)b/2n=2.5b d (n-n)b/2n。
19.本发明具有以下显著的、有益的技术效果:
20.本发明提供的基于多传感器数据融合的高空坠物拦截设备,通过在建筑上布置多种传感器,识别高空坠物,并根据识别结果控制坠物拦截与回收装置对坠物进行精准拦截与自主回收,可以完全实现自动化、无人工干预。整套装置简单、快捷,易于安装,平时处于闭合状态,不破坏建筑物的外观和美观。
附图说明
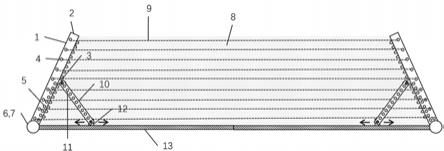
21.图1:坠物拦截与回收装置结构示意图;
22.图2:收网线连接安装示意图;
23.其中:1-拦截臂、2-挂网孔、3-收网传动臂固定座、4-多个外收网孔、5-多个内收网孔、6-拦截臂转动轴、7-转动轴驱动电机、8-拦截网、9-收网线、10-收网传动臂、11-传动臂穿网孔、12-收网滑动座、13-收网滑轨,14-第1根收网线,15-第2根收网线。
具体实施方式
24.在本部分将结合具体实施例对本发明所提供的设备、装置进行进一步详细、具体
的解释与说明。需要指出的,本部分所提供的实施例不构成对本发明保护范围的限制;在本实施例的基础上所做出的非实质性改变,均与本实施例相同。
25.实施例1
26.在本实施例中,一种基于多传感器数据融合的高空坠物拦截设备,包括设置在建筑物上用于识别高空坠物的多种传感器、对传感器数据进行分析判断的坠物判断与识别系统、根据识别结果对高空坠物进行拦截并对坠物进行回收的坠物拦截及收回装置,所述的传感器、坠物判断与识别系统、坠物拦截及回收装置之间具有有线或无线的通信链路。所述的坠物判断与识别系统通过计算装置实现,如个人计算机、树莓派等设备或者其他现有技术中的计算装置均可实现。
27.所述的多种传感器包括活物检测传感器、位置判断传感器、图像采集器;所述坠物拦截与回收装置放置于建筑物的下方,悬空固定在建筑物的外立面上,图像采集器设置在坠物拦截及回收装置上方,方向朝上,用于采集图像数据;活物检测传感器放置于每层楼可抛物位置,用于检测活物或采集压力数据;位置判断传感器放置于每层楼可抛物位置的下方、建筑物的外立面上并朝建筑外,用于判断物体坠落位置。
28.所述的可抛物位置为可用于向楼体外抛物的位置,如窗口、阳台等。
29.所述的活物检测传感器可以是红外传感器,也可以是压力传感器,每个可抛物位置(如窗口、阳台等)部署红外传感器或压力传感器:如部署红外传感器,则部署于墙面,朝向为可抛物位置;如部署压力传感器,则部署于可抛物位置的地面,用以检测压力变化;
30.所述的位置判断传感器为红外传感器、图像采集器为摄像头。除此处提到的传感器外,现有技术中其他能够实现活物检测或压力检测、位置判断以及图像采集功能的器件亦在本发明的保护范围之内。
31.实施例2
32.与实施例1相比,本实施例的不同之处在于:在实施例1的基础上,所述的坠物拦截及回收装置如附图1所示,包括:拦截臂1、挂网孔2、收网传动臂固定座3、外收网孔4、内收网孔5、拦截臂转动轴6、转动轴驱动电机7、拦截网8、收网线9、收网传动臂10、传动臂穿网孔11、收网滑动座12、收网滑轨13,其中:
33.所述的拦截臂转动轴6为两个,固定在建筑物外立面的墙体上,收网滑轨13安装在两个拦截臂转动轴6之间;
34.所述的拦截臂1为两个,每个拦截臂1的其中一端固定在其中一个拦截臂转动轴6上、在拦截臂转动轴6与收网滑轨13的连接处,拦截臂可以在拦截臂转动轴上转动;每个拦截臂上均设置有挂网孔2、外收网孔1、内收网孔5,在拦截臂转动轴6上安装有转动轴驱动电机7;
35.所述的收网传动臂10为两个,每个收网传动臂的其中一端通过收网传动臂固定座3固定安装在其中一个拦截臂1内侧,另一端通过收网滑动座12安装在收网滑轨13上,收网滑动座12在收网滑轨13上可以滑动;所述的收网传动臂10上设置有传动臂穿网孔11;
36.所述的拦截网8通过挂网孔2挂在两个拦截臂1之间;
37.所述的收网线9穿插于拦截网8中,外收网孔1、内收网孔5、传动臂穿网孔11用于连接收网线9。所述的穿插是指如缝衣服穿线,收网线9如缝衣线一样穿插于拦截网8之中,收网线9收紧时可以把拦截网回收、收紧,在收网线9放松时,亦不影响拦截网8顺利展开,不仅
能够实现快速、简单的自动回收,还能够不影响收网、放网时对建筑物外观的美观。
38.本实施例的坠物拦截及回收装置的工作过程如下:
39.拦截网通过挂网孔挂在两个拦截臂之间,每个拦截臂的一端连接在拦截臂转动轴上,由驱动电机驱动展开或闭合两种状态,当拦截臂闭合时,贴合在收网滑轨上。平时,拦截臂处于闭合状态,当收到拦截指令时,驱动电机控制两个拦截臂张开,将连接在拦截臂上的拦截网展开,进行坠物拦截。
40.收网线穿插于拦截网中,通过外收网孔、内收网孔连接至传动臂穿网孔,收网线贯穿于拦截网,所有的收网线在拦截臂完全展开时均为紧绷状态,当拦截臂处于完全张开的状态时,收网传动臂与拦截臂贴合;当拦截臂处于完全闭合时,收网滑动座滑动至收网滑轨中部的位置,将收网线绷直,收网线处于紧绷状态防止拦截网下垂,并随着拦截臂收回到收网滑轨处。
41.当两个拦截臂均展开时,拦截网被张开,用于拦截坠落物体。
42.实施例3
43.与实施例2相比,本实施例的不同之处在于:在实施例2的基础上,如附图2所示,所述的两个拦截臂1之间的长度l为l=2b d,其中b表示每个拦截臂1的长度,d表示两个拦截臂1闭合状态时两个臂端之间的距离;所述的收网传动臂10长度为c,其长度为拦截臂长度b的一半;
44.所述的外收网孔、内收网孔、传动臂穿网孔均有多个,其数量相同。即:每一个传动臂上的外收网孔与内收网孔数量相等,与每一个收网传动臂上的传动臂穿网孔的数量亦相等,均表示为n。
45.在每个拦截臂1上均设置有第1个至第n个外收网孔4,表示为w1-wn,在每个拦截臂1外侧、长度b上等距排列;在每个拦截臂1上均设置有第1个至第n个内收网孔5,表示为z1-zn,在每个拦截臂1内侧、0至b/2的长度范围等距排列,w1在每个拦截臂1上远离拦截臂转动轴6一端、z1在每个拦截臂1上靠近拦截臂转动轴6一端;在每个收网传动臂10上均设置有第1个至第n个传动臂穿网孔11,表示为l1-ln,在每个收网传动臂10上等距排列,每个收网传动臂10上l1在靠近收网滑轨13一端、ln在远离收网滑轨13一端;
46.所述的收网线9有多根,第n根的其中一端固定在ln处,穿过zn孔,再穿过wn孔;线的另一端对称连接到另外一个拦截臂上;如附图2所示,第1根收网线14的其中一端固定在一侧的收网传动臂10的l1处,穿过同侧的拦截臂1上的z1孔,再穿过w1孔;第1根收网线14的另一端对称连接到另外一侧的收网传动臂10的l1处,穿过拦截臂1的z1孔,再穿过w1孔。第2根收网线15的其中一端固定在一侧的收网传动臂10的l2处,穿过同侧的拦截臂1上的z2孔,再穿过w2孔;第2根收网线15的另一端对称连接到另外一侧的收网传动臂10的l2处,穿过拦截臂1的z2孔,再穿过w2孔。
47.第n根收网线的长度为2b d b/2 (n-n)b/2n=2.5b d (n-n)b/2n。
48.通过本实施例中的外收网孔、内收网孔、传动臂穿网孔的巧妙设置,以及收网线的巧妙连接方式、长度的设置,将收网线穿插、贯穿于拦截网中,通过外收网孔、内收网孔连接至传动臂穿网孔,使得所有的收网线在拦截臂完全展开时均为紧绷状态,将拦截网张开,有效地拦截坠物;当拦截臂处于完全闭合时,将收网线绷直、防止拦截网下垂,并随着拦截臂收回到收网滑轨处。本实施例的设计使得拦截之后收网时收网线能够将拦截网干净利落地
收回,不会出现多余网线垂挂在装置上、影响建筑物美观的现象。
49.采用本发明所提供的一种基于多传感器数据融合的高空坠物拦截设备,能实现以下有益的技术效果:
50.1、本发明提供的基于多传感器数据融合的高空坠物拦截设备,通过在建筑上布置多种传感器,识别高空坠物,并根据识别结果控制坠物拦截与回收装置对坠物进行精准拦截与自主回收,可以完全实现自动化、无人工干预。整套装置简单、快捷,易于安装,且平时处于闭合状态,不破坏建筑物的外观和美观。
51.2、本发明提供的基于多传感器数据融合的高空坠物拦截设备,通过创造性地设计了坠物拦截及回收装置,巧妙地通过装置设计安装收网线,使得拦截之后收网时能够将拦截网干净利落地收回,不会出现多余网线垂挂在装置上、影响建筑物美观的现象。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。