1.本发明涉及调试与维护的技术领域,更具体地说,涉及一种基于电磁感应的气动小球定位装置和方法。
背景技术:
2.核电站气动小球测量系统为移动式堆芯中子探测系统,用于堆芯中子通量测量和堆芯功率分布重构,其利用高纯氮气将含钒-51的小球吹入堆芯活性区活化为钒-52,而后将活化的小球从堆芯吹出至测量台,钒-52以3.74分钟的半衰期自发衰变,释放γ粒子,γ粒子数量正比于小球所在堆芯活性区的功率。气动小球测量系统驱动小球在传输管道中行进,调试或维修人员无法知晓小球所处位置。
3.另外,若气动小球卡涩在测量台和堆芯之间的传输管道中,气动小球测量系统自身无法进行卡涩位置的定位。而且,现有的气动小球测量系统在反应堆停堆工况,也无法探测小球是否能进入堆芯活性区。
技术实现要素:
4.本发明要解决的技术问题在于,针对现有技术的缺陷,提供一种基于电磁感应的气动小球定位装置和方法。
5.本发明解决其技术问题所采用的技术方案是:构造一种基于电磁感应的气动小球定位装置,包括:感应单元、数据采集单元以及数据处理单元;
6.所述感应单元安装在第一传输管道上,用于检测在所述第一传输管道内行进的气动小球并输出相应的感应信号;所述第一传输管道为测量台与堆芯活性区的转接头之间的管道;
7.所述数据采集单元与所述感应单元连接,用于采集所述感应单元输出的感应信号;
8.所述数据处理单元与所述数据采集单元连接,用于根据所述数据采集单元采集的感应信号和所述感应单元的位置信息确定所述气动小球在第一传输管道的卡涩位置。
9.在本发明所述的基于电磁感应的气动小球定位装置中,所述感应单元包括:多个间隔设置在所述第一传输管道上的磁电感应装置、与所述磁电感应装置对应设置以将所述磁电感应装置固定在所述第一传输管道上的固定装置。
10.在本发明所述的基于电磁感应的气动小球定位装置中,所述固定装置与所述磁电感应装置螺纹匹配连接。
11.在本发明所述的基于电磁感应的气动小球定位装置中,所述磁电感应装置为无源两线制磁电传感器。
12.在本发明所述的基于电磁感应的气动小球定位装置中,还包括:测量台;
13.所述测量台设置在所述第一传输管道远离所述转接头的一端;
14.所述测量台用于填装气动小球、以及测量所述气动小球在第二传输管道中的卡涩
位置;所述第二传输管道为所述转接头处与堆芯活性区入口处的管道。
15.在本发明所述的基于电磁感应的气动小球定位装置中,还包括:测量单元;
16.所述测量单元用于测量所述气动小球在第三传输管道内的卡涩位置;
17.所述第三传输管道为从所述转接头处并伸入所述堆芯活性区内的管道。
18.本发明还提供一种基于电磁感应的气动小球定位方法,包括以下步骤:
19.通过感应单元检测是否有气动小球在第一传输管道内进行,若是,输出感应信号;所述第一传输管道为测量台与堆芯活性区的转接头之间的管道;
20.数据采集单元采集所述感应单元输出的感应信号,并将所述感应信号传送给数据处理单元;
21.所述数据处理单元接收所述感应信号,并根据所述感应信号获取所述感应单元的位置信息;
22.所述数据处理单元根据所述感应单元的位置信息确定所述气动小球在第一传输管道的卡涩位置。
23.在本发明所述的基于电磁感应的气动小球定位方法中,所述方法还包括:
24.打开转接头;
25.若在所述转接头有气动小球,则收集在所述转接头处的气动小球;
26.将所收集的气动小球重新填装进测量台;
27.通过所述测量台测量所述气动小球在第二传输管道中的卡涩位置;所述第二传输管道为所述转接头处与堆芯活性区入口处的管道。
28.在本发明所述的基于电磁感应的气动小球定位方法中,所述方法还包括:
29.打开转接头;
30.若在所述转接头没有气动小球,则通过测量单元测量所述气动小球在第三传输管道内的卡涩位置;所述第三传输管道为从所述转接头处并伸入所述堆芯活性区内的管道。
31.在本发明所述的基于电磁感应的气动小球定位方法中,所述测量单元包括:软性弹簧;
32.所述通过测量单元所述气动小球在第三传输管道内的卡涩位置包括:
33.将所述软性弹簧从所述转接头处伸入堆芯活性区内的管道中;
34.若遇到阻力停止伸入所述软性弹簧;
35.记录所述软性弹簧伸入所述堆芯活性区内的管道中的弹簧深度;
36.基于所述弹簧深度和堆芯活性区内的管道的长度,确定所述气动小球在所述第三传输管道内的卡涩位置。
37.实施本发明的基于电磁感应的气动小球定位装置和方法,具有以下有益效果:基于电磁感应的气动小球定位装置和方法,包括感应单元、数据采集单元和数据处理单元;感应单元安装在第一传输管道上,检测在第一传输管道内行进的气动小球并输出相应的感应信号;第一传输管道为测量台与堆芯活性区的转接头之间的管道;数据采集单元与感应单元连接,采集感应单元输出的感应信号;数据处理单元与数据采集单元连接,根据数据采集单元采集的感应信号和感应单元的位置信息确定气动小球在第一传输管道的卡涩位置。本发明可以定位气动小球在测量台和堆芯之间的传输管道的卡涩位置;另外,还可以在反应堆停堆工况下,探测气动小球是否能进入堆芯活性区,保证气动小球测量系统的测量精度。
附图说明
38.下面将结合附图及实施例对本发明作进一步说明,附图中:
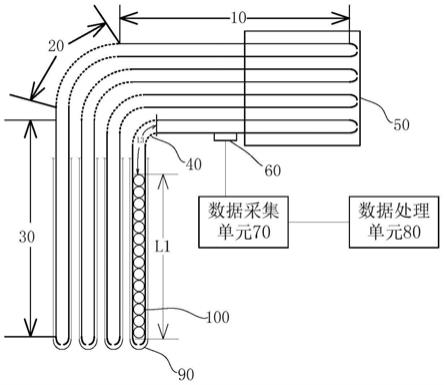
39.图1是本发明实施例提供的基于电磁感应的气动小球定位装置的结构示意图;
40.图2是本发明提供的基于电磁感应的气动小球定位方法实施例一的流程示意图;
41.图3是本发明提供的基于电磁感应的气动小球定位方法实施例二的流程示意图;
42.图4是本发明提供的基于电磁感应的气动小球定位方法实施例三的流程示意图。
具体实施方式
43.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
44.参考图1,为本发明提供的基于电磁感应的气动小球定位装置。
45.可选的,本发明实施例中,该基于电磁感应的气动小球定位装置可应用于核电站气动小球测量系统中,以实现对气动小球测量系统在传输管道中的位置定位。其中,气动小球测量系统的传输管道包括:第一传输管道10、第二传输管道20和第三传输管道30,其中,第一传输管道10为测量台50与堆芯活性区的转接头40之间的管道;第二传输管道20为转接头40处与堆芯活性区入口处的管道;第三传输管道30为从转接头40处并伸入堆芯活性区内的管道。其中,第二传输管道20和第三传输管道30为一体结构,第一传输管道10通过转接头40与第二传输管道20连接。其中,图1中的100为气动小球。
46.具体的,如图1所示,该基于电磁感应的气动小球定位装置包括:感应单元60、数据采集单元70以及数据处理单元80。
47.感应单元60安装在第一传输管道10上,用于检测在第一传输管道10内行进的气动小球并输出相应的感应信号。
48.数据采集单元70与感应单元60连接,用于采集感应单元60输出的感应信号。
49.数据处理单元80与数据采集单元70连接,用于根据数据采集单元70采集的感应信号和感应单元60的位置信息确定气动小球在第一传输管道10的卡涩位置。当然,可以理解地,在其他一些实施例中,也可以省略掉该数据处理单元80,即通过数据采集单元70采集到感应单元60的感应信号后,可直接结合感应单元60的安装位置即可确定气动小球的卡涩位置。
50.可选的,本发明实施例中,感应单元60包括:多个间隔设置在第一传输管道10上的磁电感应装置、与磁电感应装置对应设置以将磁电感应装置固定在第一传输管道10上的固定装置。
51.可选的,本发明实施例中,固定装置与磁电感应装置螺纹匹配连接。可选的,本发明实施例中,磁电感应装置为无源两线制磁电传感器。
52.具体的,固定装置为带内螺纹的帽状结构。磁电传感器的外部结构为圆柱形,且圆柱形一端带有外螺纹,该外螺纹结构与固定装置的内螺纹结构匹配,以使得磁电传感器可固定在固定装置上,并由固定装置固定在第一传输管道10上。
53.可选的,固定装置远离内螺纹结构一端设有供第一传输管道10穿过的通孔,因此,当有气动小球在传输管道内行进通过时,可以被磁电传感器的磁极检测到并引起磁通变化。
54.可选的,本发明实施例中,磁电传感器的电感量大于等于200mh。
55.可选的,本发明实施例中,第一传输管道10均为不锈钢管道,为非磁性材料,而气动小球为不锈铁材料,具有较高的磁导率,因此,基于该特性,本发明通过固定装置将磁电感应装置固定在第一传输管道10上,当气动小球经过磁电感应装置时,磁电感应装置的磁极将引起磁通变化,根据电磁感应原理,变化的磁通将产生感应电压,从而输出相应的感应信号。
56.进一步地,数据采集单元70通过电缆与磁电感应装置的另一端连接(即远离磁极的一端),当磁电感应装置产生感应电压时,该感应电压即被数据采集单元70采集并存储。
57.可选的,本发明实施例中,数据采集单元70可以为记录仪。其中,记录仪的数量可以为一个或者多个。其中,若记录仪为一个,则可以采用具有多个数据采集端口的记录仪,以便可以采集对应的磁电感应装置产生的感应电压。若记录仪为多个时,其数量可以与磁电感应装置的数量相同。
58.可以理解地,本发明通过在第一传输管道10上分开设置多个磁电感应装置,可以进行同步检测,实现快速定位。具体的,将多个磁电感应装置分开安装在第一传输管道10上,驱动小球行进,若记录仪测得磁电感应装置处有小球通过(该处的磁电感装置产生感应电压),说明该磁电感应装置上游子管道无卡涩,若下游的某处的磁电感应装置没有产生感应电压,则说明气动小球卡涩在该处的磁电感应装置与其前一个磁电感应装置之间。
59.例如,设在第一传输管道10上依次设有a、b、c、d四个磁电感应装置,开始检测时,若气动小球在第一传输管道10上无卡涩,则气动小球会依次经过磁电感应装置a、磁电感应装置b、磁电感应装置c和磁电感应装置d,若记录仪可检测到磁电感应装置a输出的感应电压,检测不到磁电感应装置b输出感应电压,则基于磁电感应装置a和磁电感应装置b的位置以及磁电感应装置a输出的感应电压,可以准确地确定气动小球在磁电感应装置a所处的位置与磁电感应装置b所处的位置之间的管道卡涩。同理,若记录仪可检测到磁电感应装置a、磁电感应装置b、磁电感应装置c输出的感应电压,检测不到磁电感应装置d输出的感应电压,则可以确定气动小球在磁电感应装置c所处的位置与磁电感应装置d所处的位置之间的管道卡涩。
60.当然,可以理解地,在其他一些实施例中,也可以只设置一个磁电感应装置在第一传输管道10。当只安装一个磁电感应装置时,具体的定位方法如下:
61.第一、将磁电感应装置固定在第一传输管道10的某处,驱动气动小球行进。
62.第二、若记录仪检测到磁电感应装置输出的感应电压,则数据处理单元80可判定该磁电感应装置所处位置及上游管道无卡涩。
63.第三、将磁电感应装置的安装位置向下游移动,重复气动小球驱动和感应测量。
64.第四、若记录仪未检测到磁电应装置输出的感应电压,则数据处理单元80可判断磁电感应装置所在位置的上游管道存在卡涩。
65.第五、将磁电感应装置的位置再次向上游移动,重复气动小球驱动和感应测量,直到查找到气动小球的卡涩位置。
66.进一步地,如图1所示,该基于电磁感应的气动小球定位装置还包括:测量台50。
67.测量台50设置在第一传输管道10远离转接头40的一端。
68.测量台50用于填装气动小球、以及测量气动小球在第二传输管道20中的卡涩位
置。
69.当完成第一传输管道10的定位后,若气动小球在第一传输管道10上无卡涩,可继续检测气动小球在第二传输管道20中是否有卡涩,并测量具体的位置。具体的,打开转接头40,若在转接头40处有气动小球,则同时收集好气动小球,防止转接头40处存在小球散落。由于在转接头40处有气动小球,因此,可以说明在转接头40距离堆芯活性区入口处的管道某处存在卡涩点,气动小球无法进入堆芯活性区。
70.此时,将所收集的气动小球重新填装进测量台50的管道内,即如图1所示,在测量台50的左侧,将所收集的气动小球重新填装进测量台50的管道内,并在填装完成后,在填装口处将软性弹簧伸入测量台50的管道内,当遇到阻力时取出弹簧,并记录弹簧伸入测量台50管道内的长度(设为l2),则可以得到卡涩点与转接头40的距离为:l1-l0 l2,其中,l0为测量台50的管道长度。可以理解地,本发明实施例中,测量台50内的管道右侧结构与图1中气动小球在指套管90内的管道结构相同,即在测量台50内管道的最右端,设置有球挡,此时,气体(氮气)可以通过,气动小球不能通过。
71.进一步地,该基于电磁感应的气动小球定位装置还包括:测量单元。
72.测量单元用于测量气动小球在第三传输管道30内的卡涩位置。其中。可选的,本发明实施例中,测量单元可以为:软性弹簧。
73.具体的,若在打开转接头40时,转接头40处没有气动小球,则将软性弹簧从转接头40处伸入第三传输管道30内,若在伸入过程中遇到阻力,则停止,并记录当前软件弹簧的伸入第三传输管道30内的弹簧深度(设为l3,如图1所示),结合第三传输管道30在指套管90内的长度,即可判定气动小球是已到达堆芯活性区,或者卡涩在指套管90中的某一位置(其中,该位置与转接头40的距离为:l1 l3),即如图1所示。
74.进一步地,参考图2,为本发明提供的基于电磁感应的气动小球定位方法实施例一的流程示意图。可选的,该基于电磁感应的气动小球定位方法可以通过本发明实施例公开的基于电磁感应的气动小球定位装置实现。
75.如图2所示,该实施例中,该基于电磁感应的气动小球定位方法包括以下步骤:
76.步骤s201、通过感应单元60检测是否有气动小球在第一传输管道10内进行,若是,输出感应信号。其中,第一传输管道10为测量台50与堆芯活性区的转接头40之间的管道。
77.步骤s202、数据采集单元70采集感应单元60输出的感应信号,并将感应信号传送给数据处理单元80。
78.步骤s203、数据处理单元80接收感应信号,并根据感应信号获取感应单元60的位置信息。
79.步骤s204、数据处理单元80根据感应单元60的位置信息确定气动小球在第一传输管道10的卡涩位置。
80.具体的,将多个磁电感应装置分开安装在第一传输管道10上,驱动小球行进,若记录仪测得磁电感应装置处有小球通过(该处的磁电感装置产生感应电压),说明该磁电感应装置上游子管道无卡涩,若下游的某处的磁电感应装置没有产生感应电压,则说明气动小球卡涩在该处的磁电感应装置与其前一个磁电感应装置之间。
81.例如,设在第一传输管道10上依次设有a、b、c、d四个磁电感应装置,开始检测时,若气动小球在第一传输管道10上无卡涩,则气动小球会依次经过磁电感应装置a、磁电感应
装置b、磁电感应装置c和磁电感应装置d,若记录仪可检测到磁电感应装置a输出的感应电压,检测不到磁电感应装置b输出感应电压,则基于磁电感应装置a和磁电感应装置b的位置以及磁电感应装置a输出的感应电压,可以准确地确定气动小球在磁电感应装置a所处的位置与磁电感应装置b所处的位置之间的管道卡涩。同理,若记录仪可检测到磁电感应装置a、磁电感应装置b、磁电感应装置c输出的感应电压,检测不到磁电感应装置d输出的感应电压,则可以确定气动小球在磁电感应装置c所处的位置与磁电感应装置d所处的位置之间的管道卡涩。
82.当然,可以理解地,在其他一些实施例中,也可以只设置一个磁电感应装置在第一传输管道10。当只安装一个磁电感应装置时,具体的定位方法如下:
83.第一、将磁电感应装置固定在第一传输管道10的某处,驱动气动小球行进。
84.第二、若记录仪检测到磁电感应装置输出的感应电压,则数据处理单元80可判定该磁电感应装置所处位置及上游管道无卡涩。
85.第三、将磁电感应装置的安装位置向下游移动,重复气动小球驱动和感应测量。
86.第四、若记录仪未检测到磁电应装置输出的感应电压,则数据处理单元80可判断磁电感应装置所在位置的上游管道存在卡涩。
87.第五、将磁电感应装置的位置再次向上游移动,重复气动小球驱动和感应测量,直到查找到气动小球的卡涩位置。
88.参考图3,为本发明提供的基于电磁感应的气动小球定位方法实施例二的流程示意图。
89.如图3所示,该实施例中,该基于电磁感应的气动小球定位方法包括以下步骤:
90.步骤s301、打开转接头40。
91.步骤s302、若在转接头40有气动小球,则收集在转接头40处的气动小球。
92.步骤s303、将所收集的气动小球重新填装进测量台50。
93.步骤s304、通过测量台50测量气动小球在第二传输管道20中的卡涩位置;第二传输管道20为转接头40处与堆芯活性区入口处的管道。
94.具体的,打开转接头40,若在转接头40处有气动小球,则同时收集好气动小球,防止转接头40处存在小球散落。由于在转接头40处有气动小球,因此,可以说明在转接头40距离堆芯活性区入口处的管道某处存在卡涩点,气动小球无法进入堆芯活性区。
95.此时,将所收集的气动小球重新填装进测量台50的管道内,即如图1所示,在测量台50的左侧,将所收集的气动小球重新填装进测量台50的管道内,并在填装完成后,在填装口处将软性弹簧伸入测量台50的管道内,当遇到阻力时取出弹簧,并记录弹簧伸入测量台50管道内的长度(设为l2),则可以得到卡涩点与转接头40的距离为:l1-l0 l2,其中,l0为测量台50的管道长度。
96.参考图4,为本发明提供的基于电磁感应的气动小球定位方法实施例二的流程示意图。
97.如图4所示,该实施例中,该基于电磁感应的气动小球定位方法包括以下步骤:
98.步骤s401、打开转接头40。
99.步骤s402、若在转接头40没有气动小球,则通过测量单元测量气动小球在第三传输管道30内的卡涩位置。第三传输管道30为从转接头40处并伸入堆芯活性区内的管道。
100.一些实施例中,通过测量单元气动小球在第三传输管道30内的卡涩位置包括:将软性弹簧从转接头40处伸入堆芯活性区内的管道中;若遇到阻力停止伸入软性弹簧;记录软性弹簧伸入堆芯活性区内的管道中的弹簧深度;基于弹簧深度和堆芯活性区内的管道的长度,确定气动小球在第三传输管道30内的卡涩位置。
101.具体的,若在打开转接头40时,转接头40处没有气动小球,则将软性弹簧从转接头40处伸入第三传输管道30内,若在伸入过程中遇到阻力,则停止,并记录当前软件弹簧的伸入第三传输管道30内的弹簧深度(设为l3,如图1所示),结合第三传输管道30在指套管90内的长度,即可判定气动小球是已到达堆芯活性区,或者卡涩在指套管90中的某一位置(其中,该位置与转接头40的距离为:l1 l3),即如图1所示。
102.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
103.专业人员还可以进一步意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、计算机软件或者二者的结合来实现,为了清楚地说明硬件和软件的可互换性,在上述说明中已经按照功能一般性地描述了各示例的组成及步骤。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
104.结合本文中所公开的实施例描述的方法或算法的步骤可以直接用硬件、处理器执行的软件模块,或者二者的结合来实施。软件模块可以置于随机存储器(ram)、内存、只读存储器(rom)、电可编程rom、电可擦除可编程rom、寄存器、硬盘、可移动磁盘、cd-rom、或技术领域内所公知的任意其它形式的存储介质中。
105.以上实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据此实施,并不能限制本发明的保护范围。凡跟本发明权利要求范围所做的均等变化与修饰,均应属于本发明权利要求的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
