1.本发明涉及风力发电系统,尤其涉及一种风力发电系统的偏航与输出功率控制方法。
背景技术:
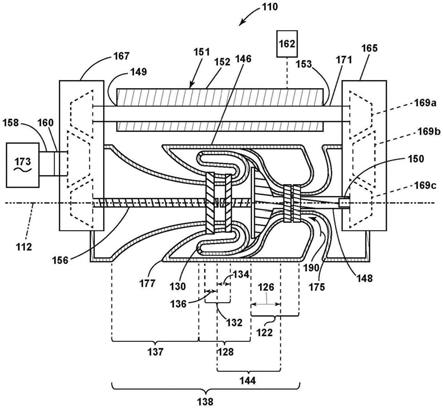
2.现有技术中,风力发电控制方式请参见图1,其主要包括:通过控制风轮对风,实现转子机械能向电能的转换,通过控制桨距角实现风轮转速控制。目前,市场上的风力发电控制方式已基本成熟,但是偏航不够智能、迅速,而且电压输出控制不够稳定,当现场出现问题时,运营维护工作量较大。
技术实现要素:
3.本发明要解决的技术问题在于,针对现有技术的不足,提供一种通过优化偏航控制过程和调整控制参数上下限,有效提高风能转化利用率,同时利用模糊控制方法解决输出电压不稳定等问题,进而提高生产力水平,以及减少现场维护工作量的偏航与输出功率控制方法。
4.为解决上述技术问题,本发明采用如下技术方案。
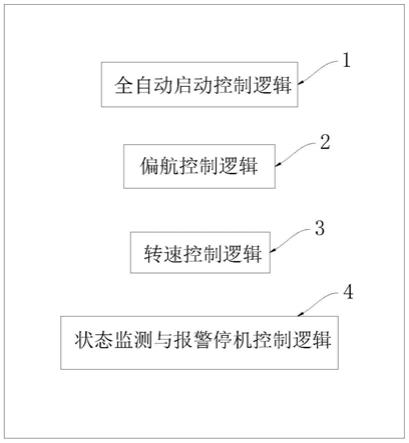
5.一种风力发电系统的偏航与输出功率控制方法,其包括有如下逻辑:全自动启动控制逻辑,用于对风速进行检测,并且当实时风速符合预设的启动风速时启动风机;偏航控制逻辑,用于计算风向角与风机偏航角之差,并根据预设的偏航控制算法控制风轮的朝向,使得所述风轮正对风,进而获得最大功率;转速控制逻辑,用于当风速低于额定风速时,令桨距角保持为0
°
,同时进行转速控制,进而实现最大风能追踪,以及获得最大能量。
6.优选地,所述全自动启动控制逻辑包括如下过程:步骤s10,判断实时风速是否符合预设的启动风速,若是,则执行步骤s11,若否,则重复执行步骤s10;步骤s11,打开风机机械刹车开关;步骤s12,令浆距角设定值=30
°
;步骤s13,判断发电机转速是否满足:发电机转速≥420r/min?若是,则执行步骤s14,若否,则重复执行步骤s13;步骤s14,令浆距角设定值=0
°
;步骤s15,判断发电机转速是否满足:发电机转速≥1000r/min?若是,则闭合并网开关,开始发电,若否,则则重复执行步骤s15。
7.优选地,所述步骤s10中,当实时风速满足:4m/s≤风速<25m/s条件时,执行所述步骤s11。
8.优选地,所述偏航控制逻辑包括如下过程:步骤s20,实时监测风速和风向;步骤s21,判断风速是否超过4m/s,若是,则执行步骤s22,若否,则令左偏航=0、右偏航=0、正对风=1;步骤s22,计算风向角与偏航角的差θ,判断θ是否超过预设的允许值θ1?若是,则执行步骤s23,若否,则重复执行步骤s22;步骤s23,判断偏航角是否满足:偏航角=1080
°
?若是,则令左偏航=1、右偏航=0、正对风=1,若否,则执行步骤s24;步骤s24,判断偏航角是否满足:偏航角≥360
°
?若是,则执行步骤s24,若否,则执行步骤s25;步骤s24,当θ满足:θ≤900
°
、θ≤540
°
以及θ≤180
°
条件时,分别对θ值进行修改,然后执行步骤s26;步骤s25,当偏
航角满足:-360
°
≤偏航角≤360
°
条件时,对θ值进行修改,然后执行步骤s26;步骤s26,判断θ是否满足:θ≥0
°
?若是,则执行步骤s27,若否,则执行步骤s28;步骤s27,判断θ是否满足:θ≥预设的角度差θ1?若是,则令左偏航=0、右偏航=1、正对风=0,若否,则令左偏航=0、右偏航=0、正对风=1;步骤s28,判断θ是否满足:θ≥预设的角度差-θ1?若是,则令左偏航=1、右偏航=0、正对风=0,若否,则令左偏航=0、右偏航=0、正对风=1。
9.优选地,所述步骤s24包括:步骤s240,判断θ是否满足:θ≤900
°
?若否,则执行步骤s241,若是,则令θ=θ 1080
°
,令θ2=θ 偏航角;然后判断θ2是否满足:θ2≥1080
°
,若否,则执行步骤s26,若是,则令θ=θ-360
°
,然后执行步骤s26;步骤s241,判断θ是否满足:θ≤540
°
?若否,则执行步骤s242,若是,则令θ=θ 720
°
,然后执行步骤s26;步骤s242,判断θ是否满足:θ≤180
°
?若否,则执行步骤s26,若是,则令θ=θ 360
°
,然后执行步骤s26。
10.优选地,所述步骤s25中,当偏航角满足:-360
°
≤偏航角≤360
°
条件时,执行如下过程:步骤s250,判断θ是否满足:θ<-180
°
?若是,则令θ=θ 360
°
,然后执行步骤s26,若否,则执行步骤s251;步骤s251,判断θ是否满足:θ>180
°
?,若否,则执行步骤s26,若是,则令θ=θ-360
°
,然后执行步骤s26。
11.优选地,所述步骤s25中,当偏航角不满足:-360
°
≤偏航角≤360
°
条件时,执行步骤s29;步骤s29,判断偏航角是否满足:偏航角=-1080
°
?若是,则令左偏航=0、右偏航=1、正对风=0,若否,则执行步骤s290;步骤s290,判断θ是否满足:θ>900
°
?若否,则执行步骤s291,若是,则令θ=θ-1080
°
、令θ2=θ 偏航角;然后判断θ2是否满足:θ2≤-1080
°
?若否,则执行步骤s26,若是,则令θ=θ 360
°
,然后执行步骤s26;步骤s291,判断θ是否满足:θ>540
°
?若否,则执行步骤s292,若是,则令θ=θ-720
°
,然后执行步骤s26;步骤s292,判断θ是否满足:θ>180
°
?若否,则执行步骤s26,若是,则令θ=θ-360
°
,然后执行步骤s26。
12.优选地,所述转速控制逻辑中,转速的控制策略包括:根据所检测的风速,在最佳叶尖速比条件下,确定理想转速n*,将转速n*与实际转速值进行比较并得到偏差值,利用pid控制器计算出电磁转矩设定值并输送至预设的执行器,进而控制转速保持为理想转速,进而保证叶尖速比最优、功率吸收系数最优以及功率达到最大值。
13.优选地,还包括有:状态监测与报警停机控制逻辑,用于对风力发电机组进行电力参数监测、风力参数监测以及机组状态参数监测。
14.优选地,所述状态监测与报警停机控制逻辑中,所述电力参数监测过程所监测的电网电力参数包括电网三相电压,所述风力参数监测过程包括风速和风向监测,所述机组状态参数监测过程包括转速、温度、机舱振动、油位参数的实时监测。
15.本发明公开的风力发电系统的偏航与输出功率控制方法中,首先确定随机变量为风向和风速,通过控制发电机的转向装置,在风向垂直风轮时可捕捉最大风能,并实时控制发电机叶片桨距角,可实现对叶轮的转速控制,从而利用风力带动飞轮装置,将风能转化为机械能,利用发电装置将机械能转化为稳定的可供给负载正常使用的输出电能。相比现有技术而言,本发明通过优化设计偏航控制程序和调整控制参数上下限,提高了风能有效转化利用率,同时,利用模糊控制方法有针对性地解决了输出电压不稳定等问题,极大提高了生活及生产力水平,大大减少了现场维护工作量,较好地满足了应用需求。
附图说明
16.图1为现有技术中风力发电控制系统的组成框图;
17.图2为本发明风力发电系统的偏航与输出功率控制方法的逻辑框图;
18.图3为实现本发明风力发电系统的偏航与输出功率控制方法的系统框图;
19.图4为全自动启动控制逻辑的流程图;
20.图5为偏航控制逻辑的局部流程图一;
21.图6为偏航控制逻辑的局部流程图二;
22.图7为转速控制逻辑的流程图;
23.图8为功率模糊自整定控制过程的流程图;
24.图9为大风停机控制过程的流程图。
具体实施方式
25.下面结合附图和实施例对本发明作更加详细的描述。
26.本发明公开了一种风力发电系统的偏航与输出功率控制方法,请参见图2,其包括有如下逻辑:
27.全自动启动控制逻辑1,用于对风速进行检测,并且当实时风速符合预设的启动风速时启动风机;
28.偏航控制逻辑2,用于计算风向角与风机偏航角之差,并根据预设的偏航控制算法控制风轮的朝向,使得所述风轮正对风,进而获得最大功率;
29.转速控制逻辑3,用于当风速低于额定风速时,令桨距角保持为0
°
,同时进行转速控制,进而实现最大风能追踪,以及获得最大能量。
30.上述方法中,首先确定随机变量为风向和风速,通过控制发电机的转向装置,在风向垂直风轮时可捕捉最大风能,并实时控制发电机叶片桨距角,可实现对叶轮的转速控制,从而利用风力带动飞轮装置,将风能转化为机械能,利用发电装置将机械能转化为稳定的可供给负载正常使用的输出电能。相比现有技术而言,本发明通过优化设计偏航控制程序和调整控制参数上下限,提高了风能有效转化利用率,同时,利用模糊控制方法有针对性地解决了输出电压不稳定等问题,极大提高了生活及生产力水平,大大减少了现场维护工作量,较好地满足了应用需求。
31.实现本发明技术方案的硬件架构请参见图3,本发明选择s7-1200作为控制器,cpu1214c集成了14di/10do和2路ai。通过增加1个模拟量输出信号板sb1232,提供1路ao,配置一个profibus-dp主站模块cm1243-5,分布式i/o设备et200m作为从站,通过接口im153连接至profibus总线,et200m配置了4个模拟量sm331模块和1个模拟量输出模块,提供32路ai和4路ao。来自风力发电机现场的开关量信号连接主机单元的di/do,模拟量检测信号和执行信号分别接至et200m的输入输出。采用分布式i/o,分布式i/o通过profibus-dp与plc通信,减少大量的接线。采用scl编程语言,在西门子博图v11版本软件平台环境下编辑各控制功能块,包括:全自动启动、偏航控制、转速控制以及运行状态检测和报警停机控制功能模块,实现了基于随机变量(风速和风向)的风力发电功率模糊自整定控制。
32.本实施例中,请参见图4,所述全自动启动控制逻辑1包括如下过程:
33.步骤s10,判断实时风速是否符合预设的启动风速,若是,则执行步骤s11,若否,则
重复执行步骤s10;进一步地,所述步骤s10中,当实时风速满足:4m/s≤风速<25m/s条件时,执行所述步骤s11。
34.步骤s11,打开风机机械刹车开关;
35.步骤s12,令浆距角设定值=30
°
;
36.步骤s13,判断发电机转速是否满足:发电机转速≥420r/min?若是,则执行步骤s14,若否,则重复执行步骤s13;
37.步骤s14,令浆距角设定值=0
°
;
38.步骤s15,判断发电机转速是否满足:发电机转速≥1000r/min?若是,则闭合并网开关,开始发电,若否,则则重复执行步骤s15。
39.上述过程中,当检测到风速大于启动风速暂设置为4m/s时,可以启动风机。风机偏航,自动正对风向。风向角与风机偏航角之差不超过5
°
即可认为风机已正对风向。打开风机机械刹车开关。自动控制桨距角逐渐到0
°
,使叶片垂直迎风。当发电机转速达到同步转速1000rpm附近时,闭合并网开关,开始发电。
40.作为一种优选方式,结合图5和图6所示,所述偏航控制逻辑2包括如下过程:
41.步骤s20,实时监测风速和风向;
42.步骤s21,判断风速是否超过4m/s,若是,则执行步骤s22,若否,则令左偏航=0、右偏航=0、正对风=1;
43.步骤s22,计算风向角与偏航角的差θ,判断θ是否超过预设的允许值θ1?若是,则执行步骤s23,若否,则重复执行步骤s22;
44.步骤s23,判断偏航角是否满足:偏航角=1080
°
?若是,则令左偏航=1、右偏航=0、正对风=1,若否,则执行步骤s24;
45.步骤s24,判断偏航角是否满足:偏航角≥360
°
?若是,则执行步骤s24,若否,则执行步骤s25;
46.步骤s24,当θ满足:θ≤900
°
、θ≤540
°
以及θ≤180
°
条件时,分别对θ值进行修改,然后执行步骤s26;
47.步骤s25,当偏航角满足:-360
°
≤偏航角≤360
°
条件时,对θ值进行修改,然后执行步骤s26;
48.步骤s26,判断θ是否满足:θ≥0
°
?若是,则执行步骤s27,若否,则执行步骤s28;
49.步骤s27,判断θ是否满足:θ≥预设的角度差θ1?若是,则令左偏航=0、右偏航=1、正对风=0,若否,则令左偏航=0、右偏航=0、正对风=1;
50.步骤s28,判断θ是否满足:θ≥预设的角度差-θ1?若是,则令左偏航=1、右偏航=0、正对风=0,若否,则令左偏航=0、右偏航=0、正对风=1。
51.进一步地,所述步骤s24包括:
52.步骤s240,判断θ是否满足:θ≤900
°
?若否,则执行步骤s241,若是,则令θ=θ 1080
°
,令θ2=θ 偏航角;然后判断θ2是否满足:θ2≥1080
°
,若否,则执行步骤s26,若是,则令θ=θ-360
°
,然后执行步骤s26;
53.步骤s241,判断θ是否满足:θ≤540
°
?若否,则执行步骤s242,若是,则令θ=θ 720
°
,然后执行步骤s26;
54.步骤s242,判断θ是否满足:θ≤180
°
?若否,则执行步骤s26,若是,则令θ=θ 360
°
,
然后执行步骤s26。
55.进一步地,所述步骤s25中,当偏航角满足:-360
°
≤偏航角≤360
°
条件时,执行如下过程:
56.步骤s250,判断θ是否满足:θ<-180
°
?若是,则令θ=θ 360
°
,然后执行步骤s26,若否,则执行步骤s251;
57.步骤s251,判断θ是否满足:θ>180
°
?,若否,则执行步骤s26,若是,则令θ=θ-360
°
,然后执行步骤s26。
58.本实施例的所述步骤s25中,当偏航角不满足:-360
°
≤偏航角≤360
°
条件时,执行步骤s29;
59.步骤s29,判断偏航角是否满足:偏航角=-1080
°
?若是,则令左偏航=0、右偏航=1、正对风=0,若否,则执行步骤s290;
60.步骤s290,判断θ是否满足:θ>900
°
?若否,则执行步骤s291,若是,则令θ=θ-1080
°
、令θ2=θ 偏航角;然后判断θ2是否满足:θ2≤-1080
°
?若否,则执行步骤s26,若是,则令θ=θ 360
°
,然后执行步骤s26;
61.步骤s291,判断θ是否满足:θ>540
°
?若否,则执行步骤s292,若是,则令θ=θ-720
°
,然后执行步骤s26;
62.步骤s292,判断θ是否满足:θ>180
°
?若否,则执行步骤s26,若是,则令θ=θ-360
°
,然后执行步骤s26。
63.上述偏航控制逻辑在实现过程中,风的方向始终处于变化之中,对此,本实施例设计偏航控制算法,在各种情况下保证风机根据风向角的变化都能以最短路径尽快正对风向,最大限度的从风中获取能量。当风向角与风机偏航角之差超过5
°
,即需要进行偏航控制。将各种情况的风向角和偏航角之间的角差都变到-180
°
~180
°
范围内,使得风轮能在最短时间内正对风,获得最大功率。
64.本实施例中,请参见图7和图8,当风速低于额定风速时,桨距角保持为0
°
,此时,进行转速控制以实现最大风能追踪,获得最大的能量。
65.所述转速控制逻辑3中,转速的控制策略包括:根据所检测的风速,在最佳叶尖速比条件下,确定理想转速n*,将转速n*与实际转速值进行比较并得到偏差值,利用pid控制器计算出电磁转矩设定值并输送至预设的执行器,进而控制转速保持为理想转速,进而保证叶尖速比最优、功率吸收系数最优以及功率达到最大值。
66.作为一种优选方式,请参见图2,本实施例还包括有:
67.状态监测与报警停机控制逻辑4,用于对风力发电机组进行电力参数监测、风力参数监测以及机组状态参数监测。
68.进一步地,所述状态监测与报警停机控制逻辑4中,所述电力参数监测过程所监测的电网电力参数包括电网三相电压,所述风力参数监测过程包括风速和风向监测,所述机组状态参数监测过程包括转速、温度、机舱振动、油位参数的实时监测。
69.在本实施例中,风力发电机组运行状态监测主要包括电力参数监测、风力参数监测和机组状态参数监测。采用触摸屏进行运行状态的监测。具体监测过程如下:
70.a、电力参数监测:风力发电机组需要持续监测电网的电力参数,包括电网三相电压。
71.b、风力参数监测:风力参数主要为风速和风向的监测。
72.c、风力发电机组监测:风力发电机组的监测主要为转速、温度、机舱振动、油位等反映机组运行状态的参数需要实时监测。
73.请参见图9,系统运行过程中,如出现大风及各种故障时,需要停机操作。当风速大于25m/s时,系统发出大风停机信号,执行大风停机程序(90
°
侧风停机)。运行中发生故障时,则执行停机程序。电机系统故障主要有发电机温度过高、发电机剧烈波动和风速测量故障。传动系统故障主要有润滑油液位过低、润滑油温度过高、风轮转速测量故障、冷却水温度过高和风轮非正常制动。
74.本发明公开的风力发电系统的偏航与输出功率控制方法,其相比现有技术而言的有益效果在于,本发明通过优化偏航控制过程和调整控制参数上下限,有效提高了风能转化利用率,同时利用模糊控制方法解决了输出电压不稳定等问题,可有效地提高生产力水平,以及减少了现场维护工作量。在此基础上,本发明利用模糊自整定控制功能模块,实现了偏航控制和输出功率稳压控制,并且基于plc硬件设备的市场成熟度和工业级稳定性,使得整个风力发电自动控制系统实现了免维护稳定运行,此外,本发明还充分考虑了风力发电机组的平稳启动、安全运行和高效利用风能,较好地满足了应用需求。
75.以上所述只是本发明较佳的实施例,并不用于限制本发明,凡在本发明的技术范围内所做的修改、等同替换或者改进等,均应包含在本发明所保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。