技术特征:
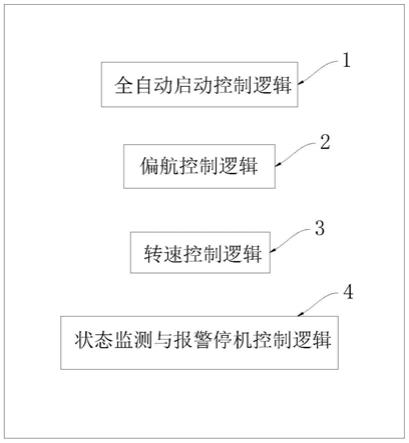
1.一种风力发电系统的偏航与输出功率控制方法,其特征在于,包括有如下逻辑:全自动启动控制逻辑(1),用于对风速进行检测,并且当实时风速符合预设的启动风速时启动风机;偏航控制逻辑(2),用于计算风向角与风机偏航角之差,并根据预设的偏航控制算法控制风轮的朝向,使得所述风轮正对风,进而获得最大功率;转速控制逻辑(3),用于当风速低于额定风速时,令桨距角保持为0
°
,同时进行转速控制,进而实现最大风能追踪,以及获得最大能量。2.如权利要求1所述的风力发电系统的偏航与输出功率控制方法,其特征在于,所述全自动启动控制逻辑(1)包括如下过程:步骤s10,判断实时风速是否符合预设的启动风速,若是,则执行步骤s11,若否,则重复执行步骤s10;步骤s11,打开风机机械刹车开关;步骤s12,令浆距角设定值=30
°
;步骤s13,判断发电机转速是否满足:发电机转速≥420r/min?若是,则执行步骤s14,若否,则重复执行步骤s13;步骤s14,令浆距角设定值=0
°
;步骤s15,判断发电机转速是否满足:发电机转速≥1000r/min?若是,则闭合并网开关,开始发电,若否,则则重复执行步骤s15。3.如权利要求2所述的风力发电系统的偏航与输出功率控制方法,其特征在于,所述步骤s10中,当实时风速满足:4m/s≤风速<25m/s条件时,执行所述步骤s11。4.如权利要求1所述的风力发电系统的偏航与输出功率控制方法,其特征在于,所述偏航控制逻辑(2)包括如下过程:步骤s20,实时监测风速和风向;步骤s21,判断风速是否超过4m/s,若是,则执行步骤s22,若否,则令左偏航=0、右偏航=0、正对风=1;步骤s22,计算风向角与偏航角的差θ,判断θ是否超过预设的允许值θ1?若是,则执行步骤s23,若否,则重复执行步骤s22;步骤s23,判断偏航角是否满足:偏航角=1080
°
?若是,则令左偏航=1、右偏航=0、正对风=1,若否,则执行步骤s24;步骤s24,判断偏航角是否满足:偏航角≥360
°
?若是,则执行步骤s24,若否,则执行步骤s25;步骤s24,当θ满足:θ≤900
°
、θ≤540
°
以及θ≤180
°
条件时,分别对θ值进行修改,然后执行步骤s26;步骤s25,当偏航角满足:-360
°
≤偏航角≤360
°
条件时,对θ值进行修改,然后执行步骤s26;步骤s26,判断θ是否满足:θ≥0
°
?若是,则执行步骤s27,若否,则执行步骤s28;步骤s27,判断θ是否满足:θ≥预设的角度差θ1?若是,则令左偏航=0、右偏航=1、正对风=0,若否,则令左偏航=0、右偏航=0、正对风=1;步骤s28,判断θ是否满足:θ≥预设的角度差-θ1?若是,则令左偏航=1、右偏航=0、正
对风=0,若否,则令左偏航=0、右偏航=0、正对风=1。5.如权利要求4所述的风力发电系统的偏航与输出功率控制方法,其特征在于,所述步骤s24包括:步骤s240,判断θ是否满足:θ≤900
°
?若否,则执行步骤s241,若是,则令θ=θ 1080
°
,令θ2=θ 偏航角;然后判断θ2是否满足:θ2≥1080
°
,若否,则执行步骤s26,若是,则令θ=θ-360
°
,然后执行步骤s26;步骤s241,判断θ是否满足:θ≤540
°
?若否,则执行步骤s242,若是,则令θ=θ 720
°
,然后执行步骤s26;步骤s242,判断θ是否满足:θ≤180
°
?若否,则执行步骤s26,若是,则令θ=θ 360
°
,然后执行步骤s26。6.如权利要求4所述的风力发电系统的偏航与输出功率控制方法,其特征在于,所述步骤s25中,当偏航角满足:-360
°
≤偏航角≤360
°
条件时,执行如下过程:步骤s250,判断θ是否满足:θ<-180
°
?若是,则令θ=θ 360
°
,然后执行步骤s26,若否,则执行步骤s251;步骤s251,判断θ是否满足:θ>180
°
?,若否,则执行步骤s26,若是,则令θ=θ-360
°
,然后执行步骤s26。7.如权利要求4所述的风力发电系统的偏航与输出功率控制方法,其特征在于,所述步骤s25中,当偏航角不满足:-360
°
≤偏航角≤360
°
条件时,执行步骤s29;步骤s29,判断偏航角是否满足:偏航角=-1080
°
?若是,则令左偏航=0、右偏航=1、正对风=0,若否,则执行步骤s290;步骤s290,判断θ是否满足:θ>900
°
?若否,则执行步骤s291,若是,则令θ=θ-1080
°
、令θ2=θ 偏航角;然后判断θ2是否满足:θ2≤-1080
°
?若否,则执行步骤s26,若是,则令θ=θ 360
°
,然后执行步骤s26;步骤s291,判断θ是否满足:θ>540
°
?若否,则执行步骤s292,若是,则令θ=θ-720
°
,然后执行步骤s26;步骤s292,判断θ是否满足:θ>180
°
?若否,则执行步骤s26,若是,则令θ=θ-360
°
,然后执行步骤s26。8.如权利要求1所述的风力发电系统的偏航与输出功率控制方法,其特征在于,所述转速控制逻辑(3)中,转速的控制策略包括:根据所检测的风速,在最佳叶尖速比条件下,确定理想转速n*,将转速n*与实际转速值进行比较并得到偏差值,利用pid控制器计算出电磁转矩设定值并输送至预设的执行器,进而控制转速保持为理想转速,进而保证叶尖速比最优、功率吸收系数最优以及功率达到最大值。9.如权利要求1所述的风力发电系统的偏航与输出功率控制方法,其特征在于,还包括有:状态监测与报警停机控制逻辑(4),用于对风力发电机组进行电力参数监测、风力参数监测以及机组状态参数监测。10.如权利要求9所述的风力发电系统的偏航与输出功率控制方法,其特征在于,所述状态监测与报警停机控制逻辑(4)中,所述电力参数监测过程所监测的电网电力参数包括电网三相电压,所述风力参数监测过程包括风速和风向监测,所述机组状态参数监测过程
包括转速、温度、机舱振动、油位参数的实时监测。
技术总结
本发明公开了一种风力发电系统的偏航与输出功率控制方法,其包括有如下逻辑:全自动启动控制逻辑,用于对风速进行检测,并且当实时风速符合预设的启动风速时启动风机;偏航控制逻辑,用于计算风向角与风机偏航角之差,并根据预设的偏航控制算法控制风轮的朝向,使得所述风轮正对风,进而获得最大功率;转速控制逻辑,用于当风速低于额定风速时,令桨距角保持为0
技术研发人员:罗伟敏
受保护的技术使用者:罗伟敏
技术研发日:2022.01.20
技术公布日:2022/5/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。