1.本发明涉及智能家居设备控制技术领域,尤其涉及一种升降桌平稳运行的驱动电路和控制方法。
背景技术:
2.随着社会的快速发展,智能家具被广泛地运用到人们的工作和生活中。例如,智能升降桌就是一种较为常见的智能家具。升降桌的结构一般包括桌板、横梁、底座和可升降的立柱,横梁上设有电机,电机驱动横梁内的传动杆转动,所述的传动杆的两端分别与立柱内的线性升降机构传动连接,用于带动立柱内的线性升降机构转动,从而使立柱发生升降动作。
3.现有的升降桌控制算法是一个单一的速度环控制,即给升降桌设定一个目标速度,通过pid算法去控制电机,使其加速或减速至设定速度,缺点是电机从静止开始加速时,电机的启动电流较大,容易造成电机抖动明显。
技术实现要素:
4.因此,本发明实施例提供一种升降桌平稳运行的驱动电路和控制方法,有效解决电机从静止开始加速时,电机的启动电流较大,容易造成电机抖动明显的问题。
5.一方面,本发明实施例提供一种升降桌平稳运行的驱动电路,包括:设定速度计算模块,包括目标高度输入端、当前高度输入端、当前速度输入端和目标速度输出端;升降桌控制模块,包括桌腿调节模块、桌面高度计算模块和桌面速度计算模块;所述桌腿调节模块的输入端连接所述目标速度输出端,所述桌腿调节模块的输出端同时连接所述桌面高度计算模块和所述桌面速度计算模块;所述桌面高度计算模块输出至所述当前高度输入端;所述桌面速度计算模块输出至所述当前速度输入端;其中,所述桌腿调节模块设有第一pid循环组件。
6.与现有技术相比,采用该技术方案后所达到的技术效果:所述设定速度计算模块通过实时输入目标桌面高度h_set、当前桌面高度h_cur和当前升降速度v_cur,可以计算得到目标速度v_set,从而实时调节所述目标速度v_set;所述目标速度v_set经过所述第一pid循环组件控制,输出为电机电流,从而实现对电机电流的控制,避免启动时电机电流过大导致电机抖动明显。
7.在本发明的一个实施例中,所述设定速度计算模块为fcn模块。
8.采用该技术方案后所达到的技术效果:fcn模块用于实现所述驱动电路的数学表达式快捷计算。举例来说,fcn模块通过当前升降速度v_cur和预设停止加速度a_dec,计算当前升降速度降低至0时所需的距离h_dis,根据|h_cur-h_set|和h_dis的判断结果控制升降桌加速或减速;例如|h_cur-h_set|《h_dis则所述当前升降速度v_cur进入减速阶段,若|h_cur-h_set|》h_dis则所述当前升降速度v_cur进入加速阶段。
9.在本发明的一个实施例中,所述桌腿调节模块包括多个单条桌腿调节模块;每个
所述单条桌腿调节模块包括依次连接的所述第一pid循环组件和积分模块;其中,所述第一pid循环组件和所述积分模块之间具有单条桌腿速度输出端;所述积分模块远离所述第一pid循环组件的一侧设有单条桌腿高度输出端。
10.采用该技术方案后所达到的技术效果:所述升降桌的各个桌腿通过不同的电机控制升降,因此由于电机的参数差异存在差速。因此将每个桌腿通过对应的所述单条桌腿调节模块进行控制;根据每个桌腿经过调节后的桌腿当前升降速度,得到升降桌的当前升降速度v_cur;根据每个桌腿经过调节后的桌腿当前高度,得到升降桌的当前桌面高度h_cur;从而消除差速的影响。
11.在本发明的一个实施例中,所述桌面速度计算模块包括:第一add模块和第一均值模块;其中,所有所述单条桌腿速度输出端连接所述第一均值模块,所述第一均值模块依次连接所述第一add模块和所述当前速度输入端。
12.采用该技术方案后所达到的技术效果:所述第一add模块用于对所有桌腿当前升降速度进行求和,得到桌腿速度总值;所述第一均值模块用于对所述第一add模块输出的所述桌腿速度总值求平均值,以得到当前升降速度v_cur。尤其,桌腿数量为两个时,所述第一add模块求出两个桌腿的所述桌腿当前升降速度的所述桌腿速度总值,所述第一均值模块的参数根据其接口数量决定,例如两个桌腿时所述第一均值模块的参数为1/2,以求出两个桌腿的所述桌腿当前升降速度的平均值,得到当前升降速度v_cur。
13.在本发明的一个实施例中,所述桌面高度计算模块包括:第二add模块和第二均值模块;其中,所有所述单条桌腿高度输出端连接所述第二均值模块,所述第二均值模块依次连接所述第二add模块和所述当前高度输入端。
14.采用该技术方案后所达到的技术效果:所述第二add模块用于对所有桌腿当前高度进行求和,得到桌腿高度总值;所述第二均值模块用于对所述第二add模块输出的所述桌腿高度总值求平均值,以得到当前桌面高度h_cur。尤其,桌腿数量为两个时,所述第二add模块求出两个桌腿的所述桌腿当前高度的所述桌腿高度总值,所述第二均值模块的参数根据其接口数量决定,例如两个桌腿时所述第一均值模块的参数为1/2,以求出两个桌腿的所述桌腿当前高度的平均值,得到当前桌面高度h_cur。
15.在本发明的一个实施例中,所述升降桌控制模块还包括:第三add模块,连接所有所述单条桌腿高度输出端;第二pid模块,连接所述第三add模块远离所述单条桌腿高度输出端的一端;第一sum模块,连接所述第二pid模块的输出端和所述目标速度输出端,并输出至所述第一pid循环组件。
16.采用该技术方案后所达到的技术效果:第三add模块用于计算两个桌腿的所述桌腿当前高度的差值,所述第二pid模块根据所述差值计算出每个桌腿的所述桌腿当前升降速度所需的调节量,反馈至所述第一sum模块;所述第一sum模块的输入端根据所述目标速度v_set和所述调节量,重新控制每个桌腿的所述桌腿当前升降速度,以缩小所有桌腿的差速,并且缩小桌腿当前高度的差值,使升降桌保持平衡。
17.在本发明的一个实施例中,所述第一pid循环组件包括:第一pid模块;驱动计算模块,连接于所述第一pid模块和所述积分模块之间,所述驱动计算模块朝向所述积分模块的一端为所述单条桌腿速度输出端;第二sum模块,所述第二sum模块的输入端连接所述单条桌腿速度输出端和所述目标速度输出端,所述第二sum模块的输出端连接所述第一pid模
块。
18.采用该技术方案后所达到的技术效果:第一pid模块用于根据所述目标速度v_set,计算该桌腿的电机上需要施加的电流,所述驱动计算模块根据所述第一pid模块输出的电流,计算得到该桌腿的所述桌腿当前升降速度;其中,所述单条桌腿速度输出端除了将所述桌腿当前升降速度传输至所述桌面速度计算模块,还将所述桌腿当前升降速度反馈至所述第二sum模块,所述第二sum模块计算所述桌腿当前升降速度和所述目标速度v_set的差值,并输出至所述第一pid模块,所述第一pid模块根据所述差值进一步调节该桌腿的电机上需要施加的电流,避免电流过大导致电机抖动明显。
19.另一方面,本发明实施例提供一种升降桌平稳运行的控制方法,通过上述任意实施例提供的升降桌平稳运行的驱动电路实现,所述升降桌平稳运行的控制方法包括:所述设定速度计算模块输入目标桌面高度h_set,实时输入当前桌面高度h_cur和当前升降速度v_cur;判断当前桌面高度h_cur是否等于目标桌面高度h_set,若否,根据当前升降速度v_cur计算停止所需的距离h_dis;判断|h_cur-h_set|《h_dis是否满足,若是,则目标速度v_set小于所述当前升降速度v_cur,所述当前升降速度v_cur降低;若否,则所述目标速度v_set大于所述当前升降速度v_cur,所述当前升降速度v_cur升高;判断h_set-h_cur》0是否满足,若否,所述目标速度v_set反向;所述设定速度计算模块输出所述目标速度v_set至所述升降桌控制模块,所述升降桌控制模块将所述当前桌面高度h_cur和所述当前升降速度v_cur反馈至所述设定速度计算模块。
20.采用该技术方案后所达到的技术效果:所述判断当前桌面高度h_cur是否等于目标桌面高度h_set,用于确定所述升降桌当前是否需要调节高度;所述判断|h_cur-h_set|《h_dis是否满足,用于判断在所述升降桌的升降距离内,当前升降速度v_cur能否停止,避免升降桌过早停止或升降过度;所述判断h_set-h_cur》0是否满足,用于判断所述升降桌的运动方向,即确定所述升降桌是上升还是下降。
21.在本发明的一个实施例中,所述当前升降速度v_cur降低,包括:所述当前升降速度v_cur降低至目标速度v_set;其中,v_set取v_min和(|v_cur| a_dec*t1)中的较大值,v_min为预设最小速度,a_dec为预设停止加速度,t1为预设计算周期。
22.采用该技术方案后所达到的技术效果:所述当前升降速度v_cur降低时,以预设停止加速度a_dec降低,同时判断v_min和(|v_cur| a_dec*t1)的大小,避免所述当前升降速度v_cur降低过多,导致所述升降桌的升降时间过长。
23.在本发明的一个实施例中,所述当前升降速度v_cur升高,包括:所述当前升降速度v_cur升高至目标速度v_set;其中,v_set取v_max和(|v_cur| a_inc*t1)中的较小值,v_max为预设最大速度,a_inc为预设启动加速度,t1为预设计算周期。
24.采用该技术方案后所达到的技术效果:所述当前升降速度v_cur升高时,以预设启动加速度a_inc升高,同时判断v_max和(|v_cur| a_inc*t1)的大小,避免所述当前升降速度v_cur升高过多,导致所述电机抖动明显。
25.综上所述,本技术上述各个实施例可以具有如下一个或多个优点或有益效果:i)桌面高度计算模块实时反馈当前桌面高度h_cur至设定速度计算模块,桌面速度计算模块实时反馈当前升降速度v_cur至设定速度计算模块,从而实时控制升降,避免启动时当前升降速度v_cur过大导致电机的启动电流较大,从而保护电机;ii)桌面高度计算模块计算多
个单条桌腿调节模块的桌腿当前高度的平均值,桌面速度计算模块计算多个单条桌腿调节模块的桌腿当前升降速度平均值,从而消除因电机参数差异而存在的差速,使得升降桌各个桌腿的高度更加统一;iii)第一pid模块实现对桌腿当前升降速度的反馈控制,进一步控制电机电流,从而避免电机电流过大导致电机抖动明显,第二pid模块实现对桌腿当前高度的反馈控制,提高了升降桌的平衡性。
附图说明
26.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
27.图1为本发明第一实施例提供的一种升降桌平稳运行的驱动电路的结构示意图。
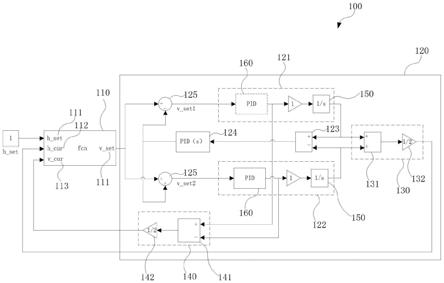
28.图2为图1中的升降桌平稳运行的驱动电路的具体结构示意图。
29.图3为本发明第二实施例提供的一种升降桌平稳运行的控制方法的流程示意图。
30.图4为图3中升降桌平稳运行的控制方法的具体流程示意图。
31.图5为图3中步骤s5的流程示意图。
32.主要元件符号说明:
33.100为升降桌平稳运行的驱动电路;110为设定速度计算模块;111为目标高度输入端;112为当前高度输入端;113为当前速度输入端;114为目标速度输出端;120为升降桌控制模块;121为第一桌腿调节模块;122为第二桌腿调节模块;123为第三add模块;124为第二pid模块;125为第一sum模块;130为桌面高度计算模块;131为第二add模块;132为第二均值模块;140为桌面速度计算模块;141为第一add模块;142为第一均值模块;150为积分模块;160为第一pid循环组件;161为第一pid模块;162为驱动计算模块;163为第二sum模块。
具体实施方式
34.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
35.【第一实施例】
36.参见图1-2,本发明第一实施例提供一种升降桌平稳运行的驱动电路100,包括:设定速度计算模块110和升降桌控制模块120。其中,设定速度计算模块110包括目标高度输入端111、当前高度输入端112、当前速度输入端113和目标速度输出端114;升降桌控制模块120,包括桌腿调节模块、桌面高度计算模块130和桌面速度计算模块140;桌腿调节模块的输入端连接目标速度输出端114,桌腿调节模块的输出端同时连接桌面高度计算模块130和桌面速度计算模块140;桌面高度计算模块130输出至当前高度输入端112;桌面速度计算模块140输出至当前速度输入端113;其中,桌腿调节模块设有第一pid循环组件160。
37.在本实施例中,用户通过目标高度输入端111输入目标桌面高度h_set,桌腿调节模块将当前桌面高度h_cur实时反馈至当前高度输入端112,并将当前升降速度v_cur实时
反馈至当前速度输入端113,设定速度计算模块110通过目标桌面高度h_set、当前桌面高度h_cur和当前升降速度v_cur,可以计算得到目标速度v_set,从而实时调节目标速度v_set;目标速度v_set经过第一pid循环组件160控制,输出为电机电流,从而实现对电机电流的控制,避免启动时电机电流过大导致电机抖动明显。
38.在一个具体的实施例中,设定速度计算模块110为fcn模块。
39.需要说明的是,所述fcn模块用于实现升降桌平稳运行的驱动电路100的数学表达式快捷计算。举例来说,所述fcn模块通过当前升降速度v_cur和预设停止加速度a_dec,计算当前升降速度降低至0时所需的距离h_dis,其中,h_dis=0.5*|a_dec|*(v_cur/a_dec)2。根据|h_cur-h_set|和h_dis的判断结果控制升降桌加速或减速;例如|h_cur-h_set|《h_dis则升降桌需要运动更多距离才能停止,此时当前升降速度v_cur降低,使升降桌及时停止,并降低电机电流;若|h_cur-h_set|》h_dis则升降桌过早停止,此时当前升降速度v_cur升高。
40.在一个具体的实施例中,桌腿调节模块包括多个单条桌腿调节模块,用于分别控制升降桌的单个桌腿。需要说明的是,升降桌的各个桌腿通过不同的电机控制升降,因此由于电机的参数差异存在桌腿升降的差速,而根据每个桌腿的当前升降速度得到升降桌的当前升降速度v_cur,并根据每个桌腿的当前高度得到当前桌面高度h_cur,能够消除所述差速带来的误差,避免升降桌倾斜。
41.优选的,每个单条桌腿调节模块包括依次连接的第一pid循环组件160和积分模块150;其中,第一pid循环组件160和积分模块150之间具有单条桌腿速度输出端;积分模块150远离第一pid循环组件160的一侧设有单条桌腿高度输出端。
42.举例来说,升降桌包括第一桌腿和第二桌腿,相应的,桌腿调节模块包括第一桌腿调节模块121和第二桌腿调节模块122。其中,第一桌腿调节模块121接收目标速度v_set,通过pid控制,从第一桌腿调节模块121的单条桌腿速度输出端,输出第一桌腿的第一当前升降速度v_cur1;同时第一当前升降速度v_cur1输入至第一桌腿调节模块121的积分模块150,第一当前升降速度v_cur1对时间进行积分得到第一桌腿的第一当前高度h_cur1,其中,该时间为预设计算周期t1。
43.同样的,第二桌腿调节模块122可输出第二当前升降速度v_cur2,并对时间进行积分得到第二当前高度h_cur2,该时间同样为预设计算周期t,此处不再赘述。
44.在一个具体的实施例中,桌面速度计算模块140例如包括:第一add模块141和第一均值模块142;其中,所有单条桌腿速度输出端连接第一均值模块142,第一均值模块142依次连接第一add模块141和当前速度输入端113。
45.优选的,在桌腿调节模块包括第一桌腿调节模块121和第二桌腿调节模块122的基础上,第一桌腿调节模块121和第二桌腿调节模块122的单条桌腿速度输出端连接第一add模块141,第一桌腿调节模块121和第二桌腿调节模块122分别向第一add模块141输入第一当前升降速度v_cur1和第二当前升降速度v_cur2,第一add模块141对第一当前升降速度v_cur1和第二当前升降速度v_cur2取正并求和,得到桌腿速度总值。
46.进一步的,在升降桌包括第一桌腿和第二桌腿的基础上,第一均值模块142的参数为1/2,用于对第一add模块141输出的桌腿速度总值求平均值,以得到当前升降速度v_cur。相应的,桌腿数量为n时,第一均值模块142的参数为1/n。
47.在一个具体的实施例中,桌面高度计算模块130例如包括:第二add模块131和第二均值模块132;其中,所有单条桌腿高度输出端连接第二均值模块132,第二均值模块132依次连接第二add模块131和当前高度输入端112。
48.优选的,在桌腿调节模块包括第一桌腿调节模块121和第二桌腿调节模块122的基础上,第一桌腿调节模块121和第二桌腿调节模块122的单条桌腿高度输出端连接第二add模块131,第一桌腿调节模块121和第二桌腿调节模块122分别向第二add模块131输入第一当前高度h_cur1和第二当前高度h_cur2,第二add模块131对第一当前高度h_cur1和第二当前高度h_cur2取正并求和,得到桌腿高度总值。
49.进一步的,在升降桌包括第一桌腿和第二桌腿的基础上,第二均值模块132的参数为1/2,用于对第二add模块131输出的桌腿高度总值求平均值,以得到当前桌面高度h_cur。相应的,桌腿数量为n时,第二均值模块132的参数为1/n。
50.在一个具体的实施例中,升降桌控制模块120还包括:第三add模块123,连接所有单条桌腿高度输出端;第二pid模块124,连接第三add模块123远离单条桌腿高度输出端的一端;第一sum模块125,连接第二pid模块124的输出端和目标速度输出端114,并输出至第一pid循环组件160。
51.优选的,第三add模块123用于计算两个桌腿的桌腿当前高度的差值,例如第三add模块123接收第一桌腿调节模块121输出的第一当前高度h_cur1,第三add模块123接收第二桌腿调节模块122输出的第二当前高度h_cur2,第一当前高度h_cur1大于第二当前高度h_cur2时,对第一当前高度h_cur1取正,并对第二当前高度h_cur2取负,再求和,从而得到所述差值。
52.优选的,第一sum模块125的数量与桌腿的数量相同。第二pid模块124根据所述差值计算出每个桌腿的桌腿当前升降速度所需的调节量,反馈至每个第一sum模块125的输入端;第一sum模块125的输入端根据目标速度v_set和所述调节量,重新控制每个桌腿的桌腿当前升降速度,以缩小所有桌腿的差速,并且缩小桌腿当前高度的差值,使升降桌保持平衡。
53.举例来说,第一当前高度h_cur1大于第二当前高度h_cur2时,第一桌腿需要降低高度,第一桌腿调节模块121和设定速度计算模块110之间的第一sum模块125对所述调节量取负,并对目标速度v_set取正,再进行求和,从而得到第一桌腿调节后的第一目标速度v_set1,并输出至第一桌腿调节模块121的第一pid循环组件160;第一当前高度h_cur1大于第二当前高度h_cur2时,第二桌腿需要提升高度,第二桌腿调节模块122和设定速度计算模块110之间的第一sum模块125对所述调节量取正,并对目标速度v_set取正,再进行求和,从而得到第二桌腿调节后的第二目标速度v_set2,并输出至第二桌腿调节模块122的第一pid循环组件160。
54.在一个具体的实施例中,第一pid循环组件160例如包括:第一pid模块161;驱动计算模块162,连接于第一pid模块161和积分模块150之间,驱动计算模块162朝向积分模块150的一端为单条桌腿速度输出端;第二sum模块163,第二sum模块163的输入端连接单条桌腿速度输出端和目标速度输出端114,第二sum模块163的输出端连接第一pid模块161。
55.需要说明的是,第一pid模块161用于根据第一目标速度v_set2或第二目标速度v_set2,计算该桌腿的电机上需要施加的电流,通过pwm信号输出至驱动计算模块162;驱动计
算模块162根据第一pid模块161输出的电机电流,计算得到该桌腿的桌腿当前升降速度,即第一当前升降速度v_cur1或第二当前升降速度v_cur2。
56.其中,升降桌的每个桌腿可通过电机和丝杆实现升降,此处不做限定。举例来说,第一桌腿调节模块121中,驱动计算模块162根据电机和丝杆的参数建立数学模型,输入电机电流即可计算得到第一当前升降速度v_cur1;第二桌腿调节模块122原理相同,此处不再赘述。
57.进一步的,单条桌腿速度输出端除了将第一当前升降速度v_cur1或第二当前升降速度v_cur2传输至桌面驱动计算模块162,还同时反馈至第二sum模块163,第二sum模块163计算第一当前升降速度v_cur1和目标速度v_set的差值,或计算第二当前升降速度v_cur2和目标速度v_set的差值,并输出至对应的第一pid模块161,第一pid模块161根据该差值进一步调节该桌腿的电机上需要施加的电流,避免电流过大导致电机抖动明显。
58.举例来说,第一桌腿调节模块121中,单条桌腿速度输出端将第一当前升降速度v_cur1输出至第二sum模块163,第二sum模块163对第一当前升降速度v_cur1取负,并对第一目标速度v_set1取正,再进行求和,从而得到第一当前升降速度v_cur1和第一目标速度v_set1的差值;第一pid模块161采用增量式控制方式,即第一pid模块161记录了前一次控制时第一桌腿的电机电流,根据本次第一当前升降速度v_cur1和第一目标速度v_set1的差值计算得到电机电流的改变量,根据前一次控制时第一桌腿的电机电流以及本次的电机电流的改变量,输出调节后的第一桌腿的电机电流;第二桌腿调节模块122原理相同,此处不再赘述。
59.【第二实施例】
60.参见图3-4,本发明第二实施例提供一种升降桌平稳运行的控制方法,通过上述任意实施例提供的升降桌平稳运行的驱动电路100实现,升降桌平稳运行的控制方法例如包括:
61.步骤s1:设定速度计算模块110输入目标桌面高度h_set,实时输入当前桌面高度h_cur和当前升降速度v_cur;
62.步骤s2:判断当前桌面高度h_cur是否等于目标桌面高度h_set,若否,根据当前升降速度v_cur计算停止所需的距离h_dis;
63.步骤s3:判断|h_cur-h_set|《h_dis是否满足,若是,则目标速度v_set小于当前升降速度v_cur,当前升降速度v_cur降低;若否,则目标速度v_set大于当前升降速度v_cur,当前升降速度v_cur升高;
64.步骤s4:判断h_set-h_cur》0是否满足,若否,所述目标速度v_set反向;
65.步骤s5:设定速度计算模块110输出目标速度v_set至升降桌控制模块120,升降桌控制模块120将当前桌面高度h_cur和当前升降速度v_cur反馈至设定速度计算模块110。
66.需要说明的是,h_dis=0.5*|a_dec|*(v_cur/a_dec)2,a_dec为预设停止加速度。在步骤s1中,所述输入目标桌面高度h_set可以通过用户直接输入目标桌面高度h_set至设定速度计算模块110,也可以由设定速度计算模块110预设多个高度模式供用户选择。
67.优选的,所述多个高度模式例如包括:长按上升键,升降桌桌面上升至最高位置,中途松手则上升至比当前桌面高度h_cur高(h_dis/2)的位置;长按下降键,升降桌桌面下降至最低位置,中途松手则下降至比当前桌面高度h_cur低(h_dis/2)的位置。当然,用户还
可以预设记忆位置,此时开启对应的记忆模式,目标桌面高度h_set即所述记忆位置的高度,此处不做限定。
68.需要说明的是,在步骤s2中,判断当前桌面高度h_cur是否等于目标桌面高度h_set,用于确定升降桌当前是否需要调节高度,若h_cur=h_set,则升降桌无需动作,若h_cur≠h_set,则升降桌开始动作。
69.需要说明的是,在步骤s3中,判断|h_cur-h_set|《h_dis是否满足,用于判断在升降桌的升降距离内,当前升降速度v_cur能否降低至0,避免升降桌过早停止或升降过度。举例来说,|h_cur-h_set|《h_dis满足时,则升降桌桌面升降至目标桌面高度h_set时,当前升降速度v_cur≠0,因此设定目标速度v_set小于所述当前升降速度v_cur,即当前升降速度v_cur减小,可以避免升降过度;|h_cur-h_set|《h_dis不满足时,则升降桌桌面升降至目标桌面高度h_set前,已经满足升降速度v_cur=0,因此设定目标速度v_set大于所述当前升降速度v_cur,即当前升降速度v_cur增加,可以避免升降桌过早停止。
70.在一个具体的实施例中,所述当前升降速度v_cur降低,例如包括:当前升降速度v_cur降低至目标速度v_set;其中,v_set取v_min和(|v_cur| a_dec*t1)中的较大值;v_min为预设最小速度;a_dec为预设停止加速度;t1为预设计算周期。
71.优选的,当前升降速度v_cur降低时,以预设停止加速度a_dec降低,同时判断v_min和(|v_cur| a_dec*t1)的大小,避免当前升降速度v_cur降低过多,导致升降桌的升降时间过长。
72.在一个具体的实施例中,当前升降速度v_cur升高,包括:当前升降速度v_cur升高至目标速度v_set;其中,v_set取v_max和(|v_cur| a_inc*t1)中的较小值,v_max为预设最大速度,a_inc为预设启动加速度,t1为预设计算周期。
73.优选的,当前升降速度v_cur升高时,以预设启动加速度a_inc升高,同时判断v_max和(|v_cur| a_inc*t1)的大小,避免当前升降速度v_cur升高过多,导致电机抖动明显。
74.需要说明的是,在步骤s4中,判断h_set-h_cur》0是否满足,用于判断升降桌的运动方向。h_cur》h_set,则升降桌桌面下降,h_cur《h_set,则升降桌桌面上升。
75.需要说明的是,参见图5,步骤s5例如包括:
76.步骤s51:多个单条桌腿调节模块同时接收目标速度v_set,每个单条桌腿调节模块输出该桌腿的桌腿当前高度和桌腿当前升降速度;
77.步骤s52:桌面高度计算模块130求所有桌腿的桌腿当前高度的平均值,并传输至设定速度计算模块110;
78.步骤s53:桌面速度计算模块140求所有桌腿的桌腿当前升降速度的平均值,并传输至设定速度计算模块110。
79.举例来说,单条桌腿调节模块的数量例如为两个,即桌腿调节模块包括第一桌腿调节模块121和第二桌腿调节模块122,相应的升降桌包括第一桌腿和第二桌腿。
80.优选的,步骤s51例如包括:第一桌腿调节模块121中,第一pid循环组件160将第一当前升降速度v_cur1传输至桌面高度计算模块130和积分模块150;积分模块150将第一当前升降速度v_cur1对时间进行积分得到第一当前高度h_cur1,并将第一当前高度h_cur1输出至桌面高度计算模块130和升降桌控制模块120。
81.同时,第二桌腿调节模块122中,第一pid循环组件160将第二当前升降速度v_cur2
传输至桌面高度计算模块130和积分模块150;积分模块150将第二当前升降速度v_cur2对时间进行积分得到第二当前高度h_cur2,并将第二当前高度h_cur2输出至桌面高度计算模块130和升降桌控制模块120。
82.进一步的,升降桌控制模块120的第三add模块123对第一当前高度h_cur1取正,对第二当前高度h_cur2取负,计算第一当前高度h_cur1和第二当前高度h_cur2的差值并输出至第二pid模块124,第二pid模块124将该差值转化为调节量输出至两个第一sum模块125。
83.再进一步,第一桌腿调节模块121中,第一sum模块125对所述调节量取负,对目标速度v_set取正,求和得到第一目标速度v_set1,并输出至第一桌腿调节模块121的第一pid循环组件160;第二桌腿调节模块122中,第一sum模块125对所述调节量取正,对目标速度v_set取正,求和得到第二目标速度v_set2,并输出至第二桌腿调节模块122的第一pid循环组件160。
84.其中,第一pid循环组件160将输出的第一当前高度h_cur1/第二当前升降速度v_cur2反馈至第二sum模块163,第二sum模块163对其取负;第二sum模块163接收第一目标速度v_set1/第二目标速度v_set2并对其取正;第二sum模块163计算第一当前高度h_cur1和第一目标速度v_set1之差,或计算第二当前高度h_cur2和第二目标速度v_set2之差,并输出至第一pid模块161;第一pid模块161根据上述差值计算电机电流的改变量,结合前一次控制时的电机电流,输出本次控制得到的电机电流,并通过pwm信号输出至驱动计算模块162;驱动计算模块162根据本次控制得到的电机电流计算并输出第一当前升降速度v_cur1/第二当前升降速度v_cur2。
85.优选的,在步骤s52中,桌面高度计算模块130中,第二add模块131接收第一当前高度h_cur1和第二当前升降速度v_cur2,并求和输出至第二均值模块132;在桌腿数量为两个的基础上,第二均值模块132的参数为1/2,从而对第一当前高度h_cur1和第二当前升降速度v_cur2求平均值,得到当前桌面高度h_cur并反馈至设定速度计算模块110的当前高度输入端112。
86.优选的,在步骤s53中,桌面速度计算模块140中,第一add模块141接收第一当前升降速度v_cur1和第二当前升降速度v_cur2,并求和输出至第一均值模块142;在桌腿数量为两个的基础上,第一均值模块142的参数为1/2,从而对第一当前升降速度v_cur1和第二当前升降速度v_cur2求平均值,得到当前升降速度v_cur并反馈至设定速度计算模块110的当前速度输入端113。
87.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。