1.本发明涉及船舶角度修正技术领域,具体地说,涉及一种船载角度跟踪补偿系统。
背景技术:
2.在目前的科研军事等领域中,由于船舶的波动会对船载设备的精度带来很大的影响,导致船上的设备对船以外的目标进行检测时有很大的系统误差。现有技术中已存的针对船舶驾驶舵角位置的跟踪系统,用于修正船舶航行过程中可能发生的航向角度或船舵角度的偏移,但无法解决船舶波动对船载设备精度造成的影响。为了解决船舶在海洋中的角度波动问题,我们需要在船舶上增设可以补偿船舶角度波动的装置及相关系统,类似于坦克车上的猎歼系统。而目前却没有适用于船舶上船载设备的角度跟踪补偿系统,鉴于此,我们提出了一种船载角度跟踪补偿系统。
技术实现要素:
3.本发明的目的在于提供了一种船载角度跟踪补偿系统,以解决上述背景技术中提出的问题。
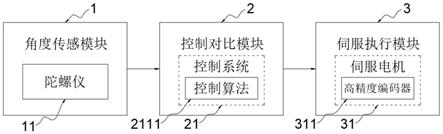
4.为实现上述技术问题的解决,本发明的目的之一在于,提供了一种船载角度跟踪补偿系统,包括角度传感模块、控制对比模块和伺服执行模块;所述角度传感模块、所述控制对比模块与所述伺服执行模块依次通过信号线信号连接;其中:
5.所述角度传感模块用于通过若干陀螺仪检测各个角度位移量及角加速度,并实时将数据传输到控制对比模块中;
6.所述控制对比模块用于在通过手动或外围设备操作控制机器各个轴的角度对准目标点时,确定跟踪到目标点后自动校正补偿船舶摆动带来的偏差,通过控制系统计算各个轴的角度补偿量,并发脉冲给伺服执行机构;
7.所述伺服执行模块用于接收来自控制对比模块发送的执行信号,操控伺服执行机构执行相应的船舶角度跟踪补偿作业的指令。
8.作为本技术方案的进一步改进,所述控制系统包括核心控制器、传感器和驱动器;所述传感器的信号输出端与所述核心控制器的信号输入端连接,所述核心控制器的信号输出端与所述驱动器的信号输入端连接;其中:
9.所述核心控制器用于接收来自传感器采集获取的包括但不限于各个角度位移量及角加速度等外部状态参数,通过相应算法计算各个轴的角度补偿量,并发送脉冲给驱动器,通过驱动器驱动伺服执行机构的工作过程。
10.作为本技术方案的进一步改进,所述核心控制器为stm32单片机,所述核心控制器的内部存有控制算法;其中,所述控制算法包括但不限于pid算法,所述pid算法用于计算各个轴的角度补偿量。
11.作为本技术方案的进一步改进,所述控制系统还包括显示器和手柄;所述显示器的信号输入端与所述核心控制器的信号输出端连接,所述手柄的信号输入端与所述核心控
制器的信号输出端连接;其中:
12.所述显示器用于直观显示控制系统运行过程中的参数数据、计算过程及运行指令等;
13.所述手柄用于通过手动进行参数设定及外部输入操作,并可调整及管理控制系统的运行过程。
14.作为本技术方案的进一步改进,所述伺服执行模块包括至少两组伺服电机,两组伺服电机垂直分布于x和y两个轴线上;所述伺服电机带有高精度编码器;所述高精度编码器用于将起对应伺服电机的旋转位移转换成一串数字脉冲信号,并通过这些脉冲来控制角位移。
15.其中,将高精度编码器与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。
16.本发明的目的之二在于,提供了一种船载角度跟踪补偿系统的伺服执行机构,所述伺服执行机构包括底座,所述底座顶端设有谐波减速机,所述谐波减速机顶端连接有纵向支撑架,所述纵向支撑架的顶端一侧通过螺栓固定连接有横向支撑框,所述纵向支撑架的顶端一侧及所述横向支撑框远离所述纵向支撑架的一端内侧均设有伺服电机及减速机总装模块,所述伺服电机及减速机总装模块外侧均设有伺服电机设备。
17.作为本技术方案的进一步改进,所述底座包括基座板,所述基座板上通过螺钉固定有底座钣金,所述控制系统及其部分相关配件安装于所述底座钣金内,所述底座钣金的顶端通过电机减速机连接法兰与所述谐波减速机连接。
18.作为本技术方案的进一步改进,所述纵向支撑架包括横梁,所述横梁轴连接在所述谐波减速机上,所述横梁的两端均通过螺钉固定有支撑臂,所述支撑臂的顶端通过平衡轴和调心轴承与所述横向支撑框连接。
19.作为本技术方案的进一步改进,所述横向支撑框由三块边框板组成,所述横向支撑框的两个边角处内侧均通过螺钉固定有框加强筋。
20.作为本技术方案的进一步改进,所述伺服电机设备通过伺服电机及减速机密封总成与所述伺服电机及减速机总装模块。
21.本发明的目的之三在于,提供了一种控制系统运行装置,该装置安装于所述核心控制器内,包括处理器、存储器以及存储在存储器中并在处理器上运行的计算机程序,处理器用于执行计算机程序时实现上述的船载角度跟踪补偿系统。
22.本发明的目的之四在于,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的船载角度跟踪补偿系统。
23.与现有技术相比,本发明的有益效果:
24.1.该船载角度跟踪补偿系统通过设置由陀螺仪为主要构成的角度传感模块,可以自动检测船舶在各个角度的位移量及角加速度;
25.2.该船载角度跟踪补偿系统通过控制系统对获取的角度位移情况进行计算,准确计算各轴线上偏移角度的补偿量,并及时发送脉冲信号给相应的伺服电机以便进行角度偏差的校正;
26.3.该船载角度跟踪补偿系统通过设置伺服执行机构,用以获取计算对比获取的角度补偿量,并执行相应动作来修正船舶摆动带来的角度偏差,利用伺服系统进行快速补偿,
在x、y、z三个轴线上保证稳定性,有效解决船舶在海洋中的角度波动对船载设备精度造成影响的问题。
附图说明
27.图1为本发明的整体系统装置框图;
28.图2为本发明中的局部系统装置框图;
29.图3为本发明中伺服执行机构的正视结构示意图;
30.图4为本发明中图3中a-a横截面的俯视结构示意图;
31.图5为本发明中伺服执行机构的右视结构示意图;
32.图6为本发明中示例性的电子计算机产品装置结构示意图。
33.图中各个标号意义为:
34.1、角度传感模块;11、陀螺仪;
35.2、控制对比模块;21、控制系统;211、核心控制器;2111、控制算法;212、传感器;213、驱动器;214、显示器;215、手柄;
36.3、伺服执行模块;31、伺服电机;311、高精度编码器;
37.4、底座;41、基座板;42、底座钣金;43、电机减速机连接法兰;
38.5、谐波减速机;
39.6、纵向支撑架;61、横梁;62、支撑臂;63、平衡轴;631、调心轴承;
40.7、横向支撑框;71、边框板;72、框加强筋;
41.8、伺服电机及减速机总装模块;
42.9、伺服电机设备;91、伺服电机及减速机密封总成。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.实施例1
45.如图1-6所示,本实施例提供了一种船载角度跟踪补偿系统,包括角度传感模块1、控制对比模块2和伺服执行模块3;角度传感模块1、控制对比模块2与伺服执行模块3依次通过信号线信号连接;其中:
46.角度传感模块1用于通过若干陀螺仪11检测各个角度位移量及角加速度,并实时将数据传输到控制对比模块2中;
47.控制对比模块2用于在通过手动或外围设备操作控制机器各个轴的角度对准目标点时,确定跟踪到目标点后自动校正补偿船舶摆动带来的偏差,通过控制系统21计算各个轴的角度补偿量,并发脉冲给伺服执行机构;
48.伺服执行模块3用于接收来自控制对比模块2发送的执行信号,操控伺服执行机构执行相应的船舶角度跟踪补偿作业的指令。
49.本实施例中,控制系统21包括核心控制器211、传感器212和驱动器213;传感器212
的信号输出端与核心控制器211的信号输入端连接,核心控制器211的信号输出端与驱动器213的信号输入端连接;其中:
50.核心控制器211用于接收来自传感器212采集获取的包括但不限于各个角度位移量及角加速度等外部状态参数,通过相应算法计算各个轴的角度补偿量,并发送脉冲给驱动器213,通过驱动器213驱动伺服执行机构的工作过程。
51.具体地,核心控制器211为stm32单片机,核心控制器211的内部存有控制算法2111;其中,控制算法2111包括但不限于pid算法,pid算法用于计算各个轴的角度补偿量。
52.进一步地,控制系统21还包括显示器214和手柄215;显示器214的信号输入端与核心控制器211的信号输出端连接,手柄215的信号输入端与核心控制器211的信号输出端连接;其中:
53.显示器214用于直观显示控制系统21运行过程中的参数数据、计算过程及运行指令等;
54.手柄215用于通过手动进行参数设定及外部输入操作,并可调整及管理控制系统21的运行过程。
55.本实施例中,伺服执行模块3包括至少两组伺服电机31,两组伺服电机31垂直分布于x和y两个轴线上;伺服电机31带有高精度编码器311;高精度编码器311用于将起对应伺服电机31的旋转位移转换成一串数字脉冲信号,并通过这些脉冲来控制角位移。
56.其中,将高精度编码器311与齿轮条或螺旋丝杠结合在一起,也可用于测量直线位移。
57.此外,该系统还可搭配船载卫星通信跟踪系统进行应用,可以进一步提高船舶位置的精确定位,并用以作为计算船舶角度波动的基础参照数据。
58.如图3-图5所示,本实施例提供了一种船载角度跟踪补偿系统的伺服执行机构,伺服执行机构包括底座4,底座4顶端设有谐波减速机5,谐波减速机5顶端连接有纵向支撑架6,纵向支撑架6的顶端一侧通过螺栓固定连接有横向支撑框7,纵向支撑架6的顶端一侧及横向支撑框7远离纵向支撑架6的一端内侧均设有伺服电机及减速机总装模块8,伺服电机及减速机总装模块8外侧均设有伺服电机设备9。
59.本实施例中,底座4包括基座板41,基座板41上通过螺钉固定有底座钣金42。
60.进一步地,控制系统21及其部分相关配件安装于底座钣金42内;其中,显示器214和手柄215应安装于底座钣金42外侧。
61.进一步地,底座钣金42的顶端通过电机减速机连接法兰43与谐波减速机5连接。
62.具体地,底座4整体采用金属外壳散热,并设置耐盐碱封闭结构。
63.其中,谐波减速机5应具有高传递精度、零背隙、高刚性等特点,且谐波减速机5还可用于保证船舶位置在z轴线上的稳定性。
64.本实施例中,纵向支撑架6包括横梁61,横梁61轴连接在谐波减速机5上,横梁61的两端均通过螺钉固定有支撑臂62,支撑臂62的顶端通过平衡轴63和调心轴承631与横向支撑框7连接,使纵向支撑架6与横向支撑框7均结实稳固。
65.本实施例中,横向支撑框7由三块边框板71组成,横向支撑框7的两个边角处内侧均通过螺钉固定有框加强筋72,使横向支撑框7结实稳固,不易松动及变形。
66.具体地,通过上述结构,使两组伺服电机设备9垂直分布于x和y两个轴线上。
67.另外,控制系统21及其相关配件与伺服电机设备9之间的通讯线及动力线缆均通过支撑臂62进行过线布设。
68.本实施例中,伺服电机设备9通过伺服电机及减速机密封总成91与伺服电机及减速机总装模块8。
69.此外,伺服执行机构的材料和机构均采用高刚性和耐腐蚀材料组成,可以最大限度地保证控制执行的精度。
70.如图6所示,本实施例还提供了一种控制系统运行装置,该装置安装于核心控制器211内,包括处理器、存储器以及存储在存储器中并在处理器上运行的计算机程序。
71.处理器包括一个或一个以上处理核心,处理器通过总线与存储器相连,存储器用于存储程序指令,处理器执行存储器中的程序指令时实现上述的船载角度跟踪补偿系统。
72.可选的,存储器可以由任何类型的易失性或非易失性存储设备或者它们的组合实现,如静态随时存取存储器(sram),电可擦除可编程只读存储器(eeprom),可擦除可编程只读存储器(eprom),可编程只读存储器(prom),只读存储器(rom),磁存储器,快闪存储器,磁盘或光盘。
73.此外,本发明还提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序被处理器执行时实现上述的船载角度跟踪补偿系统。
74.可选的,本发明还提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述各方面船载角度跟踪补偿系统。
75.本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,程序可以存储于计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
76.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的仅为本发明的优选例,并不用来限制本发明,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。